Изобретение относится к авиации и может использоваться при создании вертолетов с высокой скоростью горизонтального полета.
Известны вертолеты, предназначенные для решения широкого круга задач как в режиме зависания, так и при горизонтальном полете.
Известен вертолет, содержащий фюзеляж с двигательной установкой (ДУ), кабиной экипажа и шасси, хвостовую балку с компенсирующим винтом и несущий винт (НВ) с автоматом перекоса (АП) и управления шагом лопастей. При движении вертолета с высокой горизонтальной скоростью возникает сдвиг подъемной силы НВ, поскольку лопасти, двигающиеся навстречу потоку, обладают повышенной подъемной силой. Конструктивное решение, заключающееся в установлении вала НВ смещенным в сторону от центра масс вертолета, также не является эффективным, поскольку не избавляет полностью от опрокидывающих моментов на различных режимах.
Технической задачей изобретения является повышение функциональной эффективности.
Для этого втулка НВ с АП размещена на кронштейне с возможностью поворота вокруг оси, проходящей через плоскость симметрии вертолета, в зависимости от режима полета.
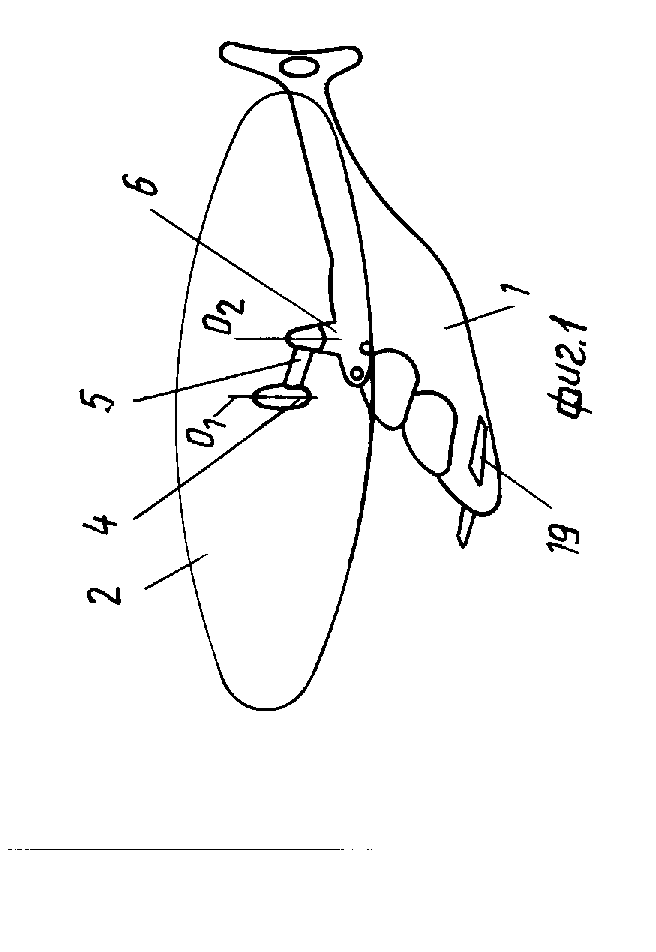
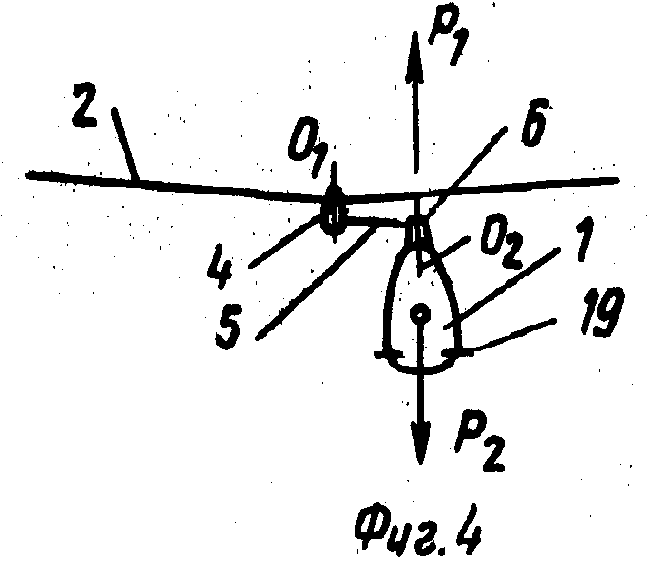
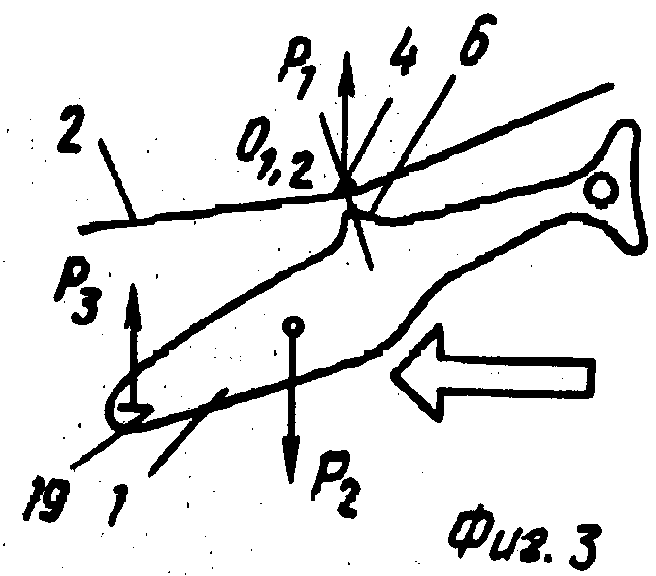
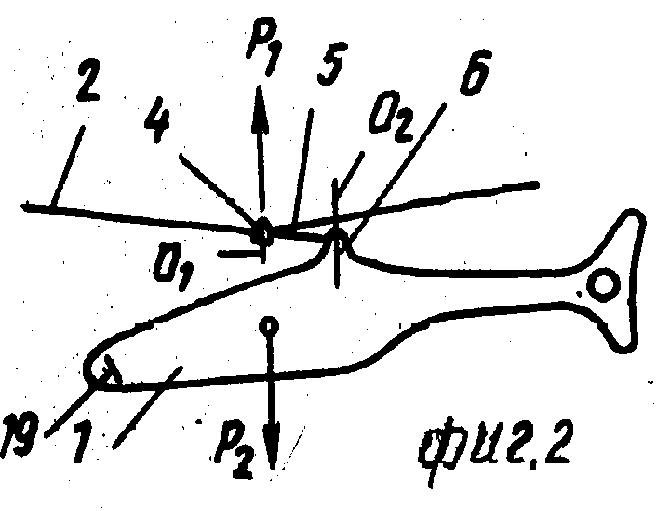
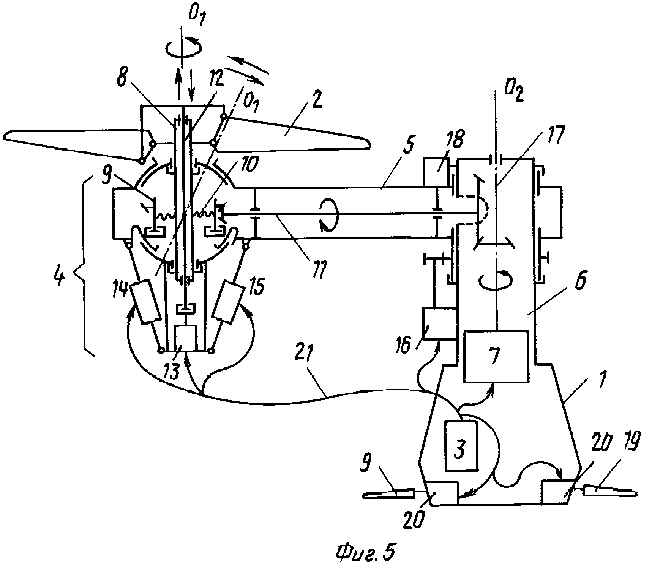
На фиг. 1 показан общий вид вертолета; на фиг. 2 - схема действия сил в режиме зависания; на фиг. 3,4 - схема действия сил в горизонтальном полете; на фиг. 5 - кинематическая схема силовой передачи.
Вертолет состоит из фюзеляжа 1, НВ 2, кабины экипажа с пультом управления 3, шасси, хвостовой балки с компенсирующим винтом, поворотного модуля 4, кронштейна 5, стойки 6 и ДУ 7.
Вал 8 НВ 2 размещен в сферическом шарнире на модуле 4, выполнен полым и обеспечивает вращение лопастей НВ 2 вокруг оси О1. На модуле 4 также расположен АП, представляющий собой втулку 9, связанную изнутри посредством плоского сильфона 10 с валом 8, а снаружи содержащую зубчатое колесо, входящее в зацепление с зубчатым колесом горизонтального вала 11. Внутри вала 8 размещен шток 12 управления шагом лопастей, связанный с одной стороны с лопастями НВ 2, а с другой стороны - с приводом 13 вертикального перемещения. Сферический шарнир модуля 4 связан с кронштейном 5 посредством приводов 14, 15, обеспечивающих поворот оси О1 в двух взаимно перпендикулярных плоскостях (на фиг. 5 условно развернуты в одной плоскости).
Кронштейн 5 шарнирно закреплен на стойке 6 с возможностью поворота вокруг вертикальной оси О2 посредством привода 16, а приводной вал 17 от ДУ 7 проходит внутри стойки 6 и связан зубчатым зацеплением с валом 11. Кронштейн 5 содержит также фиксатор 18 для закрепления на стойке 6.
Фюзеляж 1 содержит также аэродинамические поверхности 19 с приводами 20. Пульт 3, размещенный в кабине экипажа, связан посредством кабеля 21 с приводами 13-16, 20, фиксатором 18 и всеми блоками, системами и узлами вертолета.
В исходном положении фиксатор 18 закрепляет кронштейн 5 на стойке 6 так, чтобы ось О1 находилась перед осью О2 (фиг. 2). При этом ДУ 7 вращает вал 17, крутящий момент от которого через вал 11 передается на втулку 9, а с нее через сильфон 10 на вал 8, обеспечивая вращение лопастей НВ 2 вокруг оси О1. Путем перемещения штока 12 приводом 13 обеспечивается такое положение лопастей НВ 2, при котором подъемная сила Р1 НВ 2 преодолевает и уравновешивает вес Р2 вертолета, приводя к его взлету и зависанию.
Для осуществления скоростного горизонтального полета посредством приводов 14, 15 осуществляется поворот оси О1 вала 8 (положение О1 на фиг. 5) в требуемую сторону (сильфон 10 передает крутящий момент на вал 8) с последующим поворотом кронштейна 5 вокруг оси О2 посредством привода 16 (фиксатор 18 предварительно раскрывается) в зависимости от скорости горизонтального полета. По мере набора скорости равнодействующая подъемной силы Р1 НВ 2 смещается в сторону лопастей, движущихся навстречу набегающему потоку, в предельном положении оси О1 и О2 находятся в поперечной плоскости относительно оси симметрии фюзеляжа 1 (фиг. 1,3,4). Для обеспечения баланса сил приводы 20 разворачивают плоскости 19 в положение, создающее требуемую силу Р3. В таком положении вертолет осуществляет устойчивый скоростной полет фиксатор 18 может вновь жестко связать кронштейн 5 со стойкой 6. Следует заметить, что в этом положении (фиг. 1) может обеспечиться и успешное катапультирование экипажа, поскольку НВ 2 сдвинут назад и вбок относительно кабины.
При применении изобретения обеспечивается устойчивый горизонтальный скоростной полет вертолета; эффективное катапультирование экипажа в аварийной ситуации; снижение массы при передаче вращения от ДУ к НВ несколько зубчатых передач позволяют заменить редуктор (общий, главный) вертолета; простота конструкции автомата перекоса. (56) Изаксон А. М. Советское вертолетостроение, М. ; Машиностроение, 1981, с. 7.
Там же, с. 264-269.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕРТОЛЕТ | 1992 |
|
RU2009078C1 |
| Летательный аппарат | 1989 |
|
SU1827363A1 |
| САМОЛЕТ | 1996 |
|
RU2120394C1 |
| Вертолет, способы его использования и стоянка для него | 1991 |
|
SU1810231A1 |
| СПОСОБ УМЕНЬШЕНИЯ УГЛА АТАКИ НЕСУЩЕГО ВИНТА НА ПРЕДПОСАДОЧНЫХ МАНЕВРАХ ОДНОВИНТОВОГО ВЕРТОЛЕТА (ВАРИАНТЫ) | 2014 |
|
RU2539621C1 |
| АЭРОМОБИЛЬ ВЕРТИКАЛЬНОГО ВЗЛЕТА | 2017 |
|
RU2648937C1 |
| МНОГОЦЕЛЕВОЙ ДВУХФЮЗЕЛЯЖНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2650258C1 |
| САМОЛЕТ | 1992 |
|
RU2028966C1 |
| СПОСОБ ТРАНСПОРТИРОВКИ ВЕРТОЛЕТОВ ТИПА МИ-8 САМОЛЕТОМ ИЛ-76 И ОСНАСТКА ДЛЯ РАЗМЕЩЕНИЯ И ШВАРТОВКИ ВЕРТОЛЕТОВ МИ-8 ПРИ ТРАНСПОРТИРОВКЕ ИХ САМОЛЕТОМ ИЛ-76 | 2005 |
|
RU2310584C2 |
| ТАНК | 1992 |
|
RU2027974C1 |
Изобретение относится к авиации и может использоваться при создании моделей вертолетов с высокой скоростью горизонтального полета. Технической задачей изобретения является повышение функциональной эффективности. Вертолет содержит фюзеляж 1, несущий винт 2, аэродинамические поверхности 19 и закрепленный на стойке 6 с помощью поворотного кронштейна 5 поворотный модуль 4, которые поворачиваются соответственно вокруг вертикальных осей O2 и O1 . 1 з. п. ф-лы, 5 ил.