Изобретение может быть использовано для активной безопасности транспортных средств, а также водителей и пассажиров.
Известно устройство управления транспортным средством, обеспечивающее активное поддержание безопасного движения путем поддержания безопасной дистанции (см. а.с. N 1632820, кл. В 60 К 31/00, 1991).
В данном устройстве безопасность обеспечивается средствами, содержащими блок обследования зоны обзора с локационным датчиком и датчиком скорости, по сигналу которых в блоке расчета характеристик продольного движения формируется сигнал, подаваемый на исполнительный механизм разгона и торможения, который производит автоматическое поддержание безопасной дистанции между следующими в колонне транспортными средствами.
Однако устройство имеет ограниченные возможности, поскольку не может рассчитать и произвести маневр и обеспечить безопасность в сложных дорожных ситуациях.
Известно устройство автоматического управления движением автомобиля в аварийных ситуациях (см. пат. РФ N 2006385, кл. В 60 К 31/00, 1994). Это устройство выбрано за прототип.
Устройство содержит блок обследования зоны обзора, включающий датчик пеленга и локационный датчик, кинематически связанные с блоком сканера, блок обнаружения опасного объекта, например встречного автомобиля, блок определения координат опасного объекта, в том числе его углового положения и угловой скорости. Эти параметры определяются по сигналу датчика скорости, датчиков угловой скорости, датчика пеленга, и локационного датчика, по углу крена и углу поворота корпуса с помощью расчетных формул, приведенных в описании. Устройство содержит блок расчета параметров маневра, который установлен на входе механизма разгона и торможения, и средство сигнализации, включающее блок светового сигнала, подающего водителю сигнал о необходимости маневра. Устройство совершает маневр и предотвращает столкновение транспортных средств, чем и обеспечивает с достаточной степенью вероятности безопасность транспортного средства, водителя и пассажиров.
Однако в этом устройстве возможности активной безопасности ограничены дистанцией до встречного транспорта, не превышающей 10 - 15 м. Кроме того, в указанных устройсвах не предусмотрены средства, позволяющие одновременно с маневром защитить транспортное средство и находящихся в нем водителя и пассажиров от нападения террористов. Кроме того, в усройствах не предусмотрено средств, позволяющих снизить вероятность жертв охранных лиц.
Технический результат предложенного устройства состоит в увеличении дистанции активной безопасности при одновременном расширении возможностей системы путем совершения маневра транспортного средства и одновременно обеспечения защиты водителя, пассажиров, а также охранных лиц от нападения террористов.
В предложенной системе активной безопасности транспортного средства, содержащей блок обследования зоны обзора, включающий датчик пеленга и локационный датчик, кинематически связанные с блоком сканера, блок обнаружения опасного объекта, блок определения координат опасного объекта, средство сигнализации, включающее блок подачи светового сигнала, блок расчета маневра, который установлен на входе исполнительного механизма торможения, это достигается тем, что система снабжена блоком поражения и блоком микросканирования, который жестко связан с блоком сканера и связан с блоком поражения с возможностью двухкоординатного углового перемещения относительно блока сканера, установленным на выходе блока определения координат опасного объекта блоком принятия решения о поражении, один выход которого подключен ко входу блока поражения, блоком управления сканером, установленным на выходе блока определения координат опасного объекта и подключенным ко входу блока сканера, а блок обнаружения опасного объекта содержит подключенный к выходу блока сканера блок управления записью эталонного изображения, два блока формирования массива эталонных изображений, первые входы которых подключены к выходам блока управления записью эталонного изображения, а вторые входы подключены к соответственным выходам датчика пеленга и локационного датчика, и два блока корреляционной обработки, входы которых соответственно подключены к выходам блоков формирования массива эталонных изображений, а выходы - к входам блока определения координат опасного объекта, а средство сигнализации снабжено установленным на выходе блока определения координат опасного объекта блоком подачи сигнала предупреждения и установленным на втором выходе блока принятия решения о поражении блоком тревоги, а вход блока подачи светового сигнала блока сигнализации подключен к выходу блока подачи сигнала предупреждения, при этом вход блока расчета параметров маневра подключен к выходу блока определения координат опасного объекта.
Кроме того это может быть достигнуто тем, что система снабжена блоком декодирования, установленным на выходе локационного датчика и подключенным ко входу блока подачи сигнала предупреждения, а охраняемый субъект снабжен элементом уголкового отражателя.
На фиг.1 представлена конструктивная схема кинематической связи элементов блока обследования зоны обзора и средства поражения.
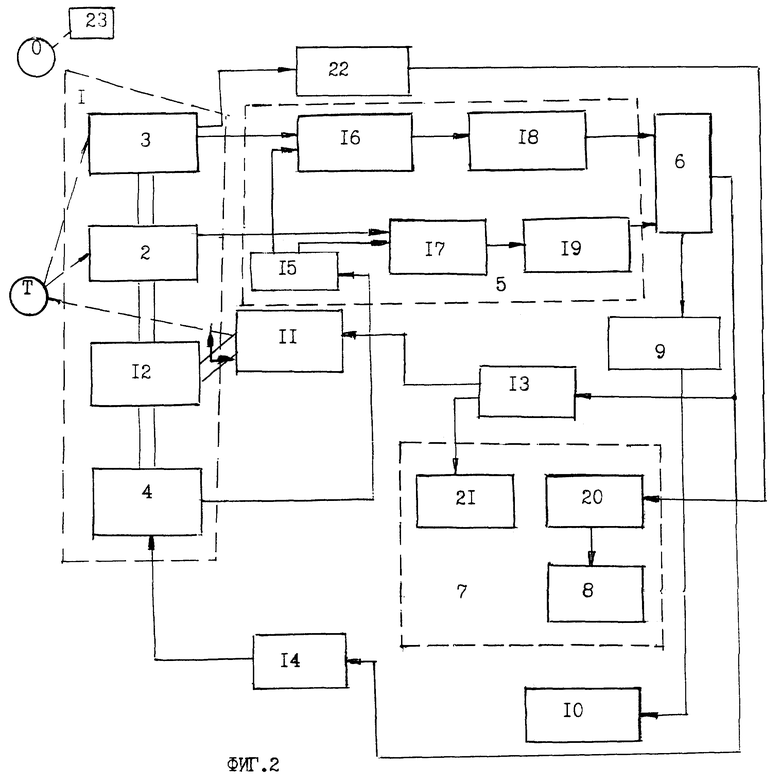
На фиг. 2 представлена блок-схема предложенной системы активной безопасности транспортного средства.
Система активной безопасности транспортного средства содержит блок обследования зоны обзора 1, включающий датчик пеленга 2 и локационный датчик 3, кинематически связанные с блоком сканера 4, блок обнаружения опасного объекта 5, блок определения координат опасного объекта 6, средство сигнализации 7, включающее блок подачи светового сигнала 8, блок расчета параметров маневра транспортного средства 9, который установлен на входе исполнительного механизма разгона и торможения 10. Предложенная система снабжена средством поражения 11 и блоком микросканирования 12, который жестко связан с блоком сканера 4 и связан с блоком поражения 11 с возможностью двухкоординатного углового перемещения относительно блока сканера 4, установленным на выходе блока определения координат опасного объекта 6, блоком принятия решения о поражении 13, один выход которого подключен ко входу средства поражения 11, блоком управления сканером 14, установленным на выходе блока определения координат опасного объекта 6 и подключенным ко входу блока сканера 4, а блок обнаружения опасного объекта 5 содержит подключенный к выходу блока сканера 4 блок управления записью эталонного изображения 15, два блока формирования массива эталонных изображений 16, 17, первые входы которых подключены к выходам блока управления записью эталонного изображения 15, а вторые входы подключены к соответственным выходам датчика пеленга 2 и локационного датчика 3, и два блока корреляционной обработки 18, 19, входы которых соответственно подключены к выходам блоков формирования массива эталонных изображений 16, 17 а выходы - ко входам блока определения координат опасного объекта 6, а средство сигнализации 7 снабжено установленным на выходе блока определения координат опасного объекта 6 блоком подачи сигнала предупреждения 20 и установленным на втором выходе блока принятия решения о поражении 13 блоком тревоги 21, а вход блока подачи светового сигнала 8 средства сигнализации 7 подключен к выходу блока подачи сигнала предупреждения 20 при этом вход блока расчета параметров маневра транспортного средства 9 подключен к выходу блока определения координат опасного объекта 6.
Система снабжена блоком декодирования 22, установленным на выходе локационного датчика 3 и подключенным ко входу блока подачи сигнала предупреждения 20, а охраняемый субъект О снабжен элементом уголкового отражателя 23. Транспортное средство с террористом обозначено символом Т.
Работа системы происходит следующим образом. В процессе подготовки к работе производится просмотр пространства вокруг охраняемого объекта. В качестве охраняемого объекта может быть транспортное средство и находящиеся в нем водитель и пассажиры. Пространство просматривается блоком сканера 4, входящим в состав блока обследования зоны обзора 1, который производит сканирование. Все узлы блока обследования зоны обзора 1 - блок сканера 4, датчик пеленга 2, локационный датчик 3 и блок микросканирования 12 кинематически связаны между собой и объединены с блоком поражения 11 в единый механический узел (см. фиг. 1).
Локационный датчик 3, например, радиолокатор измеряет дальность до объектов и скорость и производит грубый контроль углового положения появившихся в зоне обзора объектов и субъектов.
Датчик пеленга 2, который выполнен оптическим, производит точный контроль угловых координат объектов и субъектов появившихся в поле обзора.
Контроль производится по излучению объектов и субъектов в видимом и инфракрасном диапазоне.
Информация с локационного датчика 3 и с датчика пеленга 2 о пространственном положении объектов и субъектов поступает в блок обнаружения опасного объекта 5 соответственно на входы блоков формирования массивов эталонных изображений 16, 17, в которых по команде блока управления записью эталонного изображения 15 формируется сигнал в виде массива эталонных изображений.
В том случае, если параметры объектов и субъектов отличны от заданных параметров, т. е. при появлении транспортного средства Т с террористами или при появлении террористов с оружием, на блоках корреляционной обработки 18, 19 вырабатываются команды, по которым в блоке определения координат опасного объекта 6 определяются координаты опасного объекта. Блок микросканирования 12 жестко связан с блоком сканера 4 и связан с блоком поражения 11 с возможностью двухкоординатного углового перемещения относительно блока сканера 4. Это позволяет повысить точность наведения лазерного луча средства поражения 11 в пределах поля зрения датчика пеленга 2. С помощью блока микросканирования 12 производят автоматическое наведение средства поражения 11 на опасный объект и дальнейшее автоматическое отслеживание его положения и удержание в поле зрения локационного датчика 3, оптического датчика 2 и средства поражения 11 с помощью блока сканера 4, который управляется по командам блока управления сканером 14.
В блоке расчета параметров маневра транспортного средства 9 формируется команда, подаваемая на исполнительный механизм разгона и торможения 10, по которой транспортное средство совершает маневр и уходит в безопасное место. При этом сигнальные лампочки блока подачи светового сигнала 8 сигнализируют водителю о начале маневра.
Вместе с тем в блоке подачи сигнала предупреждения 20 блока сигнализации 7 вырабатывается команда предупреждения ("Стой! Стой, стрелять буду!" и т.д. )
В случае, если опасный объект не выполняет команду, в блоке принятия решения о поражении 13 принимается решение о применении средства поражения 11, которое по этому сигналу в направлении опасного объекта подает сигнал (лазерного или ультразвукового поражения). Эта команда сопровождается подачей сигнала на блок тревоги 21.
В том случае, если в поле обзора попадают лица, имеющие отношение к охране, локационный датчик 3 принимает сигнал от имеющегося у них элемента уголкового отражателя 23, по которому через подключенный к локационному датчику 3 блок декодирования 22 к блоку подачи сигнала предупреждения 20 подается команда, исключающая возможность срабатывания средства поражения 11, чем обеспечивается снижение вероятности жертв среди охранных лиц.
Технико-экономический эффект предложенного решения заключается в увеличении дистанции активной безопасности до десятков метров при одновременном расширении возможностей системы путем совершения маневра транспортного средства и одновременно обеспечения защиты водителя, пассажиров, а также охранных лиц от нападения террористов.
Система используется для обеспечения активной безопасности транспортных средств, водителей и пассажиров. Информация с локационного датчика и датчика пеленга о пространственном положении объектов поступает в блок обнаружения опасного объекта на входы блоков формирования массивов эталонных изображений. В блоках корреляционной обработки вырабатываются команды, по которым в блоке определения опасного объекта определяются координаты опасного объекта. Блок микросканирования жестко связан с блоком сканера и блоком поражения с возможностью двухкоординатного углового перемещения относительно блока сканера. В блоке расчета параметров маневра формируется команда, подаваемая на исполнительный механизм разгона и торможения. В блоке сигнализации вырабатывается команда предупреждения. В блоке принятия решения о поражении вырабатывается команда, согласно которой в направлении опасного объекта подает сигнал лазерного или ультразвукового поражения. Увеличена дистанция активной безопасности. Расширены возможности системы путем совершения маневра транспортного средства и одновременного обеспечения защиты водителя, пассажиров и охранных лиц от нападения террористов. 1 з. п. ф-лы, 2 ил.
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ АВТОМОБИЛЯ В АВАРИЙНЫХ СИТУАЦИЯХ | 1991 |
|
RU2006385C1 |
| Устройство для поддержания безопасной дистанции | 1989 |
|
SU1632820A1 |
| Устройство для поддержания безопасной дистанции между автомобилями в потоке | 1989 |
|
SU1699827A1 |
