Устройство относится к безрельсовому наземному транспорту и может быть использовано при создании внутризаводского и внутрицехового транспорта.
Известно устройство для доставки и раздачи кормов, включающее раму с самоустанавливающимися колесами и размещенный в центре рамы поворотный круг, на котором жестко закреплена пара ведущих колес.
Недостатками устройства являются невысокая устойчивость движения и ограниченная маневренность.
Известно также самоходное транспортное средство, содержащее раму и связанные с ней с возможностью поворота в горизонтальной плоскости колеса, выполненные ведущими и попарно размещенными на пересекающихся диагоналях.
Недостатками известного самоходного транспортного средства являются недостаточная устойчивость движения, недостаточная надежность и живучесть, сложность конструкции.
Целью изобретения является повышение эксплуатационных качеств.
Указанная цель достигается тем, что в устройстве для перевозки грузов, содержащем раму и связанные с ней с возможностью поворота в горизонтальной плоскости колеса, выполненные ведущими и попарно размещенными на пересекающихся диагоналях, согласно изобретению, колеса, расположенные на одной диагонали, выполнены самоустанавливающимися, а каждое колесо, расположенное на другой диагонали, снабжено индивидуальной системой управления.
Сопоставительный анализ с прототипом показывает, что заявляемое устройство для перевозки грузов отличается тем, что колеса, расположенные на одной диагонали, выполнены самоустанавливающимися, а каждое колесо, расположенное на другой диагонали, снабжено индивидуальной системой управления. Таким образом, заявляемое устройство для перевозки грузов соответствует критерию "Новизна".
Сравнение заявляемого решения не только с прототипом, но и с другими техническими решениями в данной области техники, не выявило в них признаков, отличающих заявляемое решение от прототипа, что ведет к выводу о соответствии этого решения критерию "Существенные отличия".
Повышение эксплуатационных качеств определяется повышением устойчивости движения, повышением надежности.
Повышение устойчивости движения заключается в том, что в предлагаемом устройстве исключен самопроизвольный поворот управляемых колес.
Упрощение конструкции происходит вследствие того, что в предлагаемом устройстве уменьшено минимальное число моторов и упрощена система управления поворотом колес.
Повышение надежности и живучести заключается в возможности предлагаемого устройства перемещаться и управляться даже при одном исправном моторе на одном из управляемых колес, а также в упрощении конструкции.
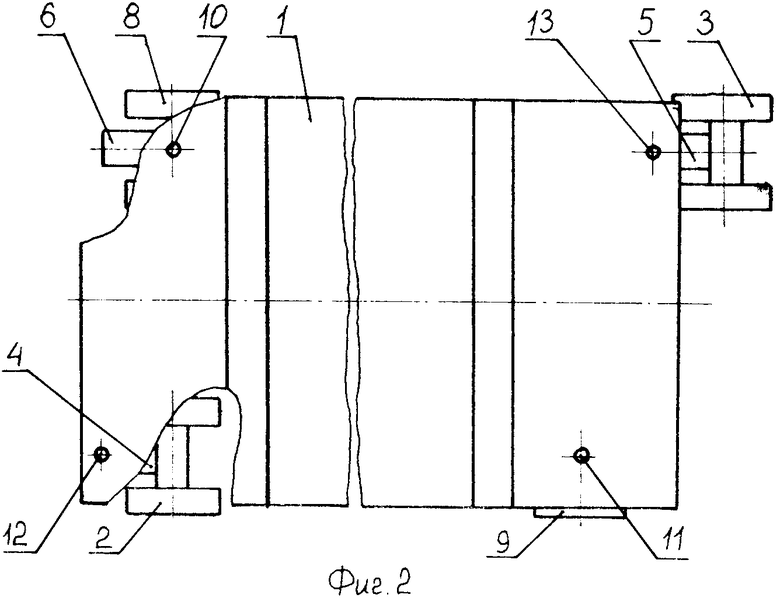
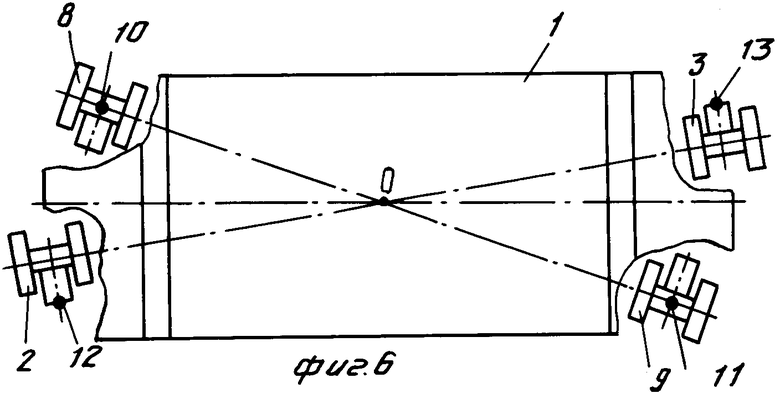
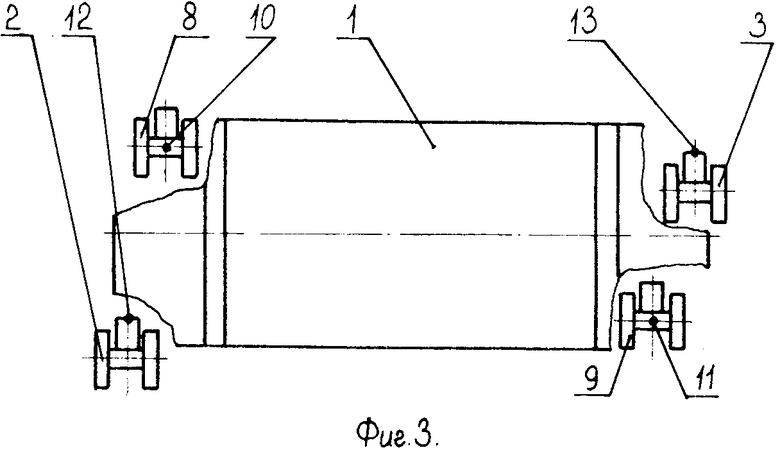
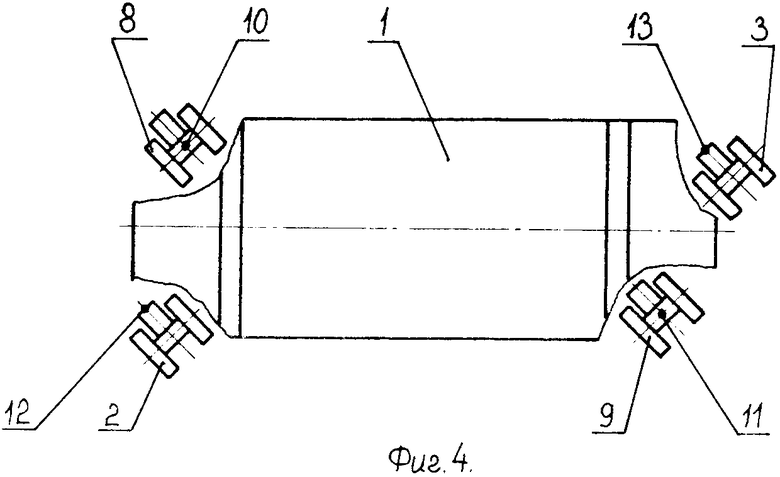
На фиг. 1 показано устройство для перевозки грузов; на фиг. 2 - то же, вид сверху; на фиг. 3 - то же, вид сверху, при его движении в направлении, перпендикулярном продольной оси устройства; на фиг. 4 - то же, вид сверху, при его движении под углом к продольной оси устройства; на фиг. 5 - схема поворота устройства в случае, когда плоскость одного из управляемых колес параллельна продольной оси устройства; на фиг. 6 - схема поворота устройства вокруг центра поворота, находящегося в центре устройства. На приведенных чертежах системы управления поворотом ведущих управляемых колес не показаны. На чертежах обозначено: "0" - центр поворота устройства.
Устройство для перевозки грузов включает в себя раму 1, расположенные на одной диагонали спаренные самоустанавливающиеся колеса 2 и 3, имеющие индивидуальные двигатели 4 и 5; расположенные на другой диагонали приводные от индивидуальных двигателей 6 и 7 спаренные ведущие управляемые колеса 8 и 9. Ведущие управляемые колеса 8 и 9 выполнены с возможностью поворота соответственно относительно вертикальных осей 10 и 11, проходящих через центр симметрии горизонтального сечения соответствующего ведущего управляемого колеса. Ведущие управляемые колеса 8 и 9 снабжены индивидуальными системами управления их поворотом. Самоустанавливающиеся колеса 2 и 3 закреплены на соответствующих вертикальных осях 12 и 13. Колеса устройства связаны с рамой 1 подвесками.
Устройство для перевозки грузов работает следующим образом.
Рама 1 при работе двигателей 4,5,6,7, воздействующих на соответствующие колеса 2,3,8,9, перемещается. Направление перемещения зависит от взаимного расположения управляемых колес 8 и 9. Если плоскости этих колес параллельны, устройство перемещается прямолинейно в направлении, определяемом положением плоскостей управляемых колес относительно продольной оси устройства. Если плоскости управляемых колес 8 и 9 параллельны продольной оси устройства, оно движется в направлении продольной оси устройства, при этом плоскости самоустанавливающихся колес 2 и 3 параллельны плоскостям управляемых колес (фиг. 2). При повороте управляемых колес 8 и 9 в одном направлении на угол 90o плоскости этих колес останутся параллельными, но устройство будет двигаться в направлении, перпендикулярном его продольной оси. Плоскости самоустанавливающихся колес 2 и 3 при этом повернутся также на угол 90o и будут параллельны плоскостям управляемых колес 8 и 9 (фиг. 3). Поворот управляемых колес 8 и 9 в одном направлении на одинаковый угол, меньший 90o, повлечет за собой движение устройства в направлении, угол которого с продольной осью устройства будет равен углу поворота управляемых колес. Плоскости самоустанавливающихся колес 2 и 3, как и в предыдущих случаях, будут параллельны плоскостям управляемых колес 8 и 9 (фиг. 4) непараллельность управляемых колес 8 и 9 приводит к движению устройства по окружности, центр поворота устройства при этом будет определяться точкой пересечения линий, являющихся продолжением осей этих колес. Устройство, таким образом, может двигаться по окружности как при повороте одного из управляемых колес, так и при повороте обоих. При повороте управляемого колеса 8 центр поворота "0" устройства находится на продолжении оси управляемого колеса 9. Плоскости самоустанавливающихся колес 2 и 3 перпендикулярны радиусам, проведенным к этим колесам из центра поворота (фиг. 5). При одновременном повороте в разные стороны управляемых колес 8 и 9 радиус поворота устройства уменьшается. Минимальная величина радиуса поворота центра устройства равна нулю, при этом плоскости управляемых колес 8 и 9 параллельны. Параллельны при этом и плоскости самоустанавливающихся колес (фиг. 6).
Боковые силы, действующие на устройство, а также моменты от этих сил передаются от рамы 1 опорной поверхности и наоборот управляемыми колесами 8 и 9. Поскольку вертикальные оси 10 и 11 проходят через центр симметрии горизонтального сечения соответствующего ведущего управляемого колеса, воздействие боковых сил на управляемые колеса 8 и 9 не сопровождается появлением дополнительных усилий в системах управления этими колесами.
Управляться устройство может либо одним управляемым колесом с помощью индивидуальной системы управления этим колесом (фиг. 5), либо одновременно двумя управляемыми колесами, при этом индивидуальные системы управления этих колес находятся в действии (фиг. 6).
При необходимости часть устройства может быть отключена, тогда устройство будет перемещаться при работе одного, двух или трех двигателей.
Технико-экономическое преимущество устройства для перевозки грузов заключается в упрощении, конструкции, упрощении обслуживания, в повышении надежности и уменьшении затрат на эксплуатацию. (56) Авторское свидетельство СССР N 221758, кл. В 60 Р 9/00, 1982.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРУГОВОЕ ТЯГОВОЕ УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПОЧВЫ | 1993 |
|
RU2050762C1 |
| ТРАНСПОРТНАЯ СИСТЕМА | 2002 |
|
RU2226473C2 |
| УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ ОПРОКИДЫВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2005640C1 |
| Самоходная тележка | 1986 |
|
SU1361054A1 |
| Канатная трелевочная установка | 1989 |
|
SU1752613A1 |
| Транспортное средство | 1989 |
|
SU1708685A1 |
| ВЫНОСНАЯ ОПОРА МАШИНЫ | 1991 |
|
RU2006377C1 |
| ТРЕЙЛЕР ДЛЯ ТРАНСПОРТИРОВКИ КРУПНОГАБАРИТНЫХ ГРУЗОВ, ПЕРЕНАЛАЖИВАЕМЫЙ ПО ШИРИНЕ И ДЛИНЕ | 1991 |
|
RU2011572C1 |
| Транспортное средство сельскохозяйственного назначения | 1974 |
|
SU523654A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ПОВЫШЕННОЙ МАНЕВРЕННОСТИ | 2008 |
|
RU2386566C1 |
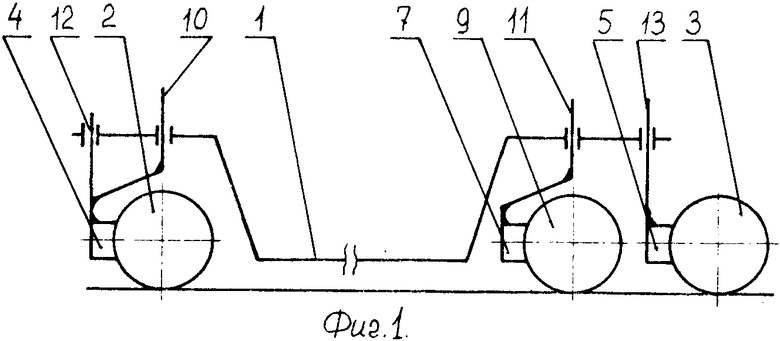
Использование: на безрельсовом транспорте. Сущность изобретения: устройство для перевозки грузов включает в себя раму 1, расположенные на одной диагонали спаренные самоустанавливающиеся колеса 2 и 3, а также расположенные на другой диагонали приводные от индивидуальных двигателей, спаренные ведущие управляемые колеса 8 и 9. Ведущие управляемые колеса 8 и 9 выполнены с возможностью поворота соответственно относительно вертикальных осей 10 и 11, проходящих через центр симметрии горизонтального сечения соответствующего ведущего управляемого колеса. Ведущие управляемые колеса 8 и 9 снабжены индивидуальными системами управления их поворотом. Самоустанавливающиеся колеса 2 и 3 закреплены на соответствующих вертикальных осях 12 и 13. Колеса устройства связаны с рамой 1 подвесками. 6 ил.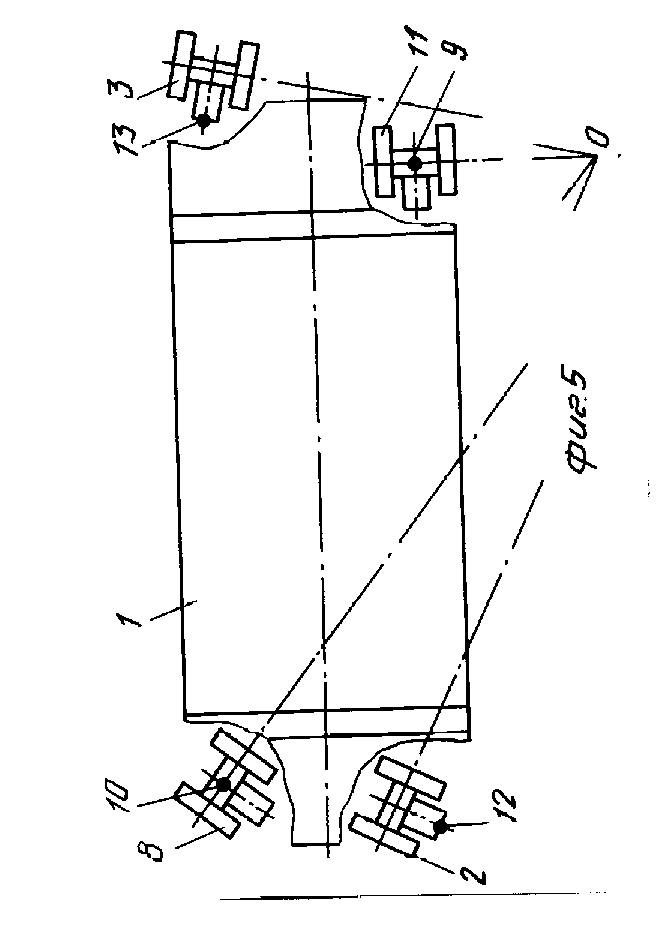
УСТРОЙСТВО ДЛЯ ПЕРЕВОЗКИ ГРУЗОВ, содержащее прямоугольную раму и связанные с ней посредством подвесок самоустанавливающиеся и ведущие управляемые колеса, расположенные соответственно на двух пересекающихся прямых линиях, отличающееся тем, что, с целью повышения устойчивости движения и маневренности, самоустанавливающиеся колеса расположены на одной диагонали рамы, а ведущие колеса - на другой диагонали, причем каждое ведущее колесо выполнено управляемым посредством индивидуальной системы управления.
