Изобретение относится к транспортному машиностроению, в частности к движителям транспортных средств, конкретно - к движителям, шагающим колесными опорами.
Известно шагающее колесо RU №2730118, выполненное с радиально расположенными по окружности опорами, снабженными башмаками, которое во избежание больших вертикальных колебаний транспортного средства от шагающих движителей, снабжено механизмом уменьшения величины вертикальных колебаний, который содержит ступицу, снабженную замкнутой направляющей и взаимодействующей с ней опорным роликом, связанным с корпусом транспортного средств, где само колесо установлено на кривошипе, поворотно связанном с рамой транспорта.
Предлагаемая конструкция движителя, шагающего колесными опорами, является дальнейшим расширением возможных конструктивных вариантов выполнения шагающих движителей.
Цель изобретения - сохранение упрощенной конструкции и достижение жесткой (устойчивой) конструкции шагающего движителя, приближенного к характеристикам колеса качения и расширение арсенала технических средств механизмов.
Указанная цель достигается тем, что движитель, шагающий колесными опорами, содержащий радиально расположенные опоры с башмаками на концах, и механизм уменьшения величины вертикальных колебаний транспорта от шагающих движителей, выполнен в виде балансира с размещенными на нем шагающими движителями с радиально расположенными по окружности опорами, установленными на разных плечах коромысла (рычага), поворотно связанного средней частью с рамой транспортного средства, и которые связаны между собой так, что в цикле шага движителя, шагающего колесными опорами, две опоры одного шагающего движителя с радиальными опорами, находятся в фазе взаимодействия с поверхностью грунта, а другого - одна опора, и смещена на полшага от опор первого, а связь между шагающими движителями с радиальными опорами, установленными на балансире, выполнены:
либо посредством шатуна, шарнирно связанного концами с указанными шагающими движителями так, что местоположение их осей на коромысле и шарниров шатуна связанных с шагающими движителями, образуют шарнирный параллелограмм, где шатун выполнен с возможностью обеспечения упругой связи между колесами;
либо посредством цепной передачи через звездочки одинакового диаметра (передаточным отношением, равным единице), установленных на осях шагающих движителей с радиальными опорами, причем цепь между шагающими движителями встречно упруго прижаты прижимными звездочками (роликами);
либо посредством цепной передачи через звездочки, передаточным отношением равным единице, связывающей шагающие движители через упругие муфты, где шарниром поворота коромысла является ось привода транспорта, на которой установлена звездочка привода транспорта, а цепь к звездочке с двух сторон прижата двумя парами звездочек или роликов;
либо посредством паразитных зубчатых колес от входного приводного зубчатого колеса к выходным - передающим вращение шагающим движителям, передаточным отношением, равным единице, через упругие муфты;
либо посредством снабжения каждого из установленных на коромысле шагающих движителей, мотор-колесом, выполненным по принципу шагового двигателя, позволяющим управлять углом поворота отдельно каждым шагающим движителем, с целью осуществления оптимального согласованного движения башмака одного шагающего движителя с башмаком другого шагающего движителя, в режиме совершения башмаками движителя, шагающего колесными опорами, шага, в цикле шага.
Указанная цель так же достигается тем, что движитель, шагающий колесными опорами, содержащий радиально расположенные опоры с башмаками на концах, где механизм уменьшения вертикальных колебаний транспорта от шагающего движителя, выполнен посредством снабжения движителя, шагающими колесными опорами, ступицей, снабженной замкнутой направляющей и взаимодействующей с ней опорным роликом, установленным на звене, связанном с рамой транспортного средства, а сам движитель, шагающий колесными опорами, поворотно установлен на качалке, связанной свободным концом звеном или, при этом, еще башмаки опор снабжены вторым шарниром, с которыми соседние шарниры башмаков связаны посредством упругих звеньев.
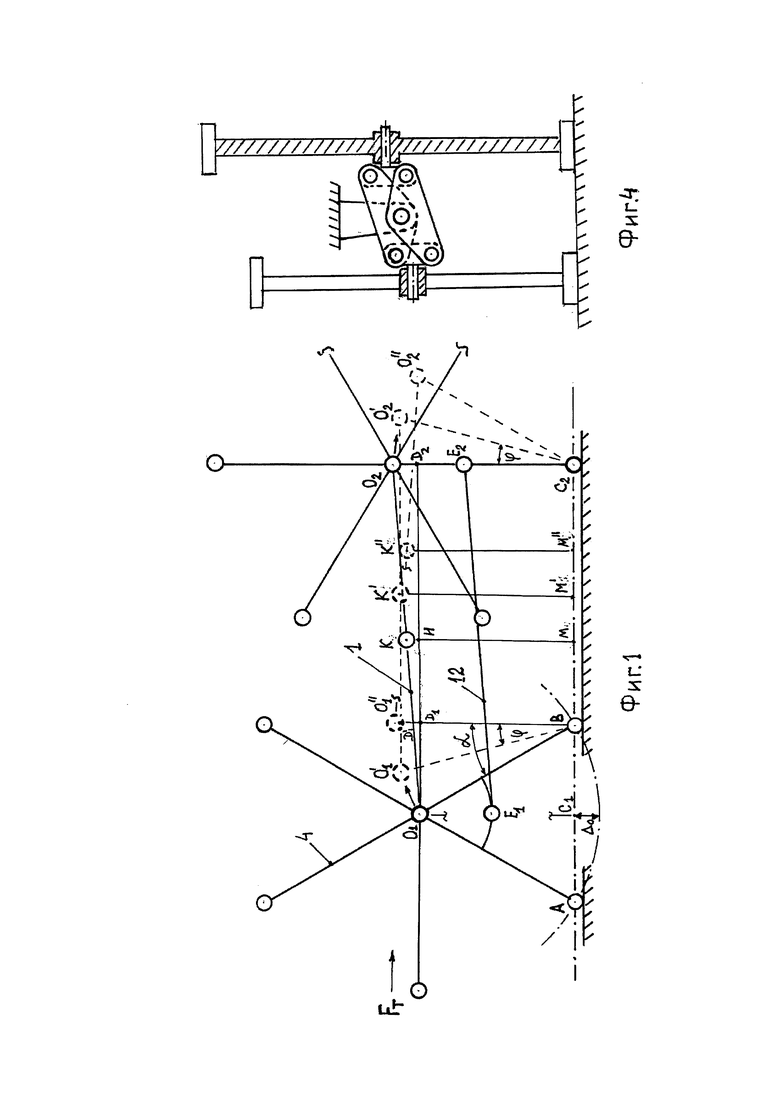
На фиг. 1 приведена кинематическая схема предложенной конструкции движителя, шагающего колесными опорами, выполненная в виде балансира с использованием коромысла, на котором установлены шагающие движители с радиально расположенными по окружности шестью опорами, и для расчетного определения степени уменьшения величины колебаний корпуса транспортного средства по сравнению с шагающим движителем, используемым без балансира.
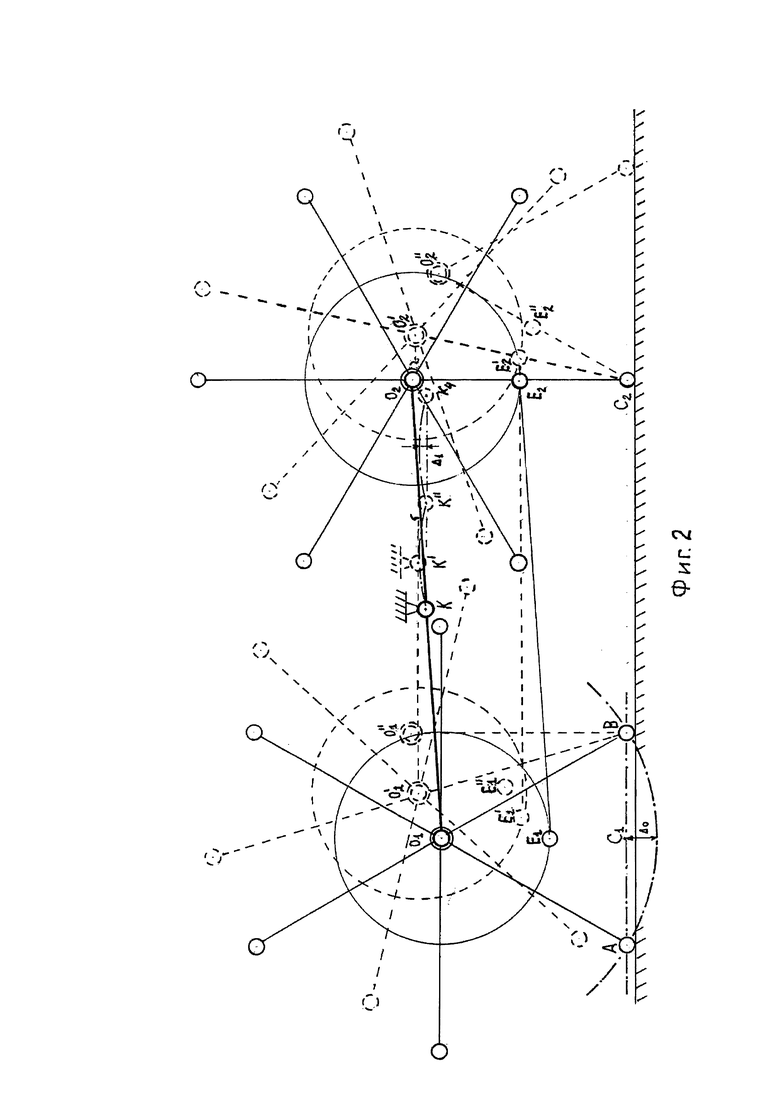
На фиг. 2 - кинематическая схема фиг. 1, отражающая величину вертикальных колебаний шарнира коромысла (точки K), связывающего с рамой транспортного средства, при совершении полного цикла шага опорами движителя, шагающего колесными опорами.
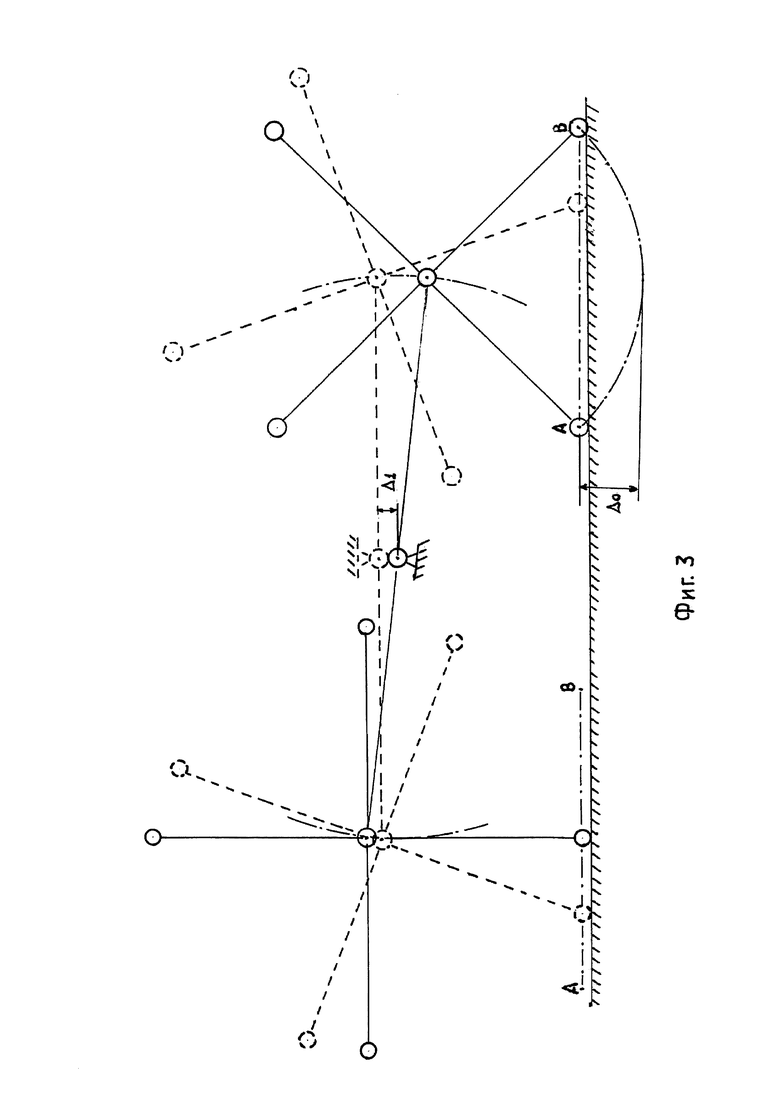
На фиг. 3 - кинематическая схема с шагающими движителями с четырьмя опорами.
На фиг. 4 - с шагающими движителями, расположенными в балансире рядом.
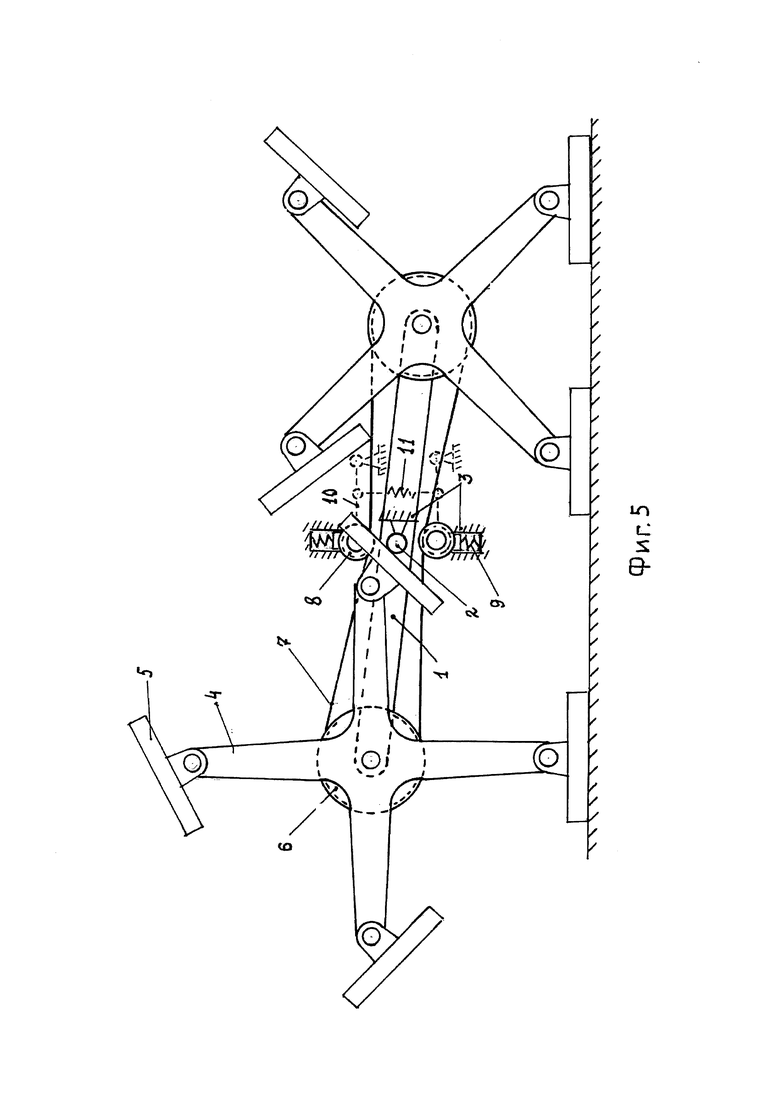
На фиг. 5 - движитель, шагающий колесными опорами, где связь между установленными на балансире шагающими движителями осуществлена посредством цепной 7 передачи, которая с двух сторон прижата прижимными звездочками (роликами) 8, поджатых относительно рамы 3 посредством пружин 9. На фигуре приведен и другой вариант (штриховой линией) прижатия цепи посредством качалок 10, поворотно установленных относительно рамы 3 и стянутых друг к другу пружиной 11.
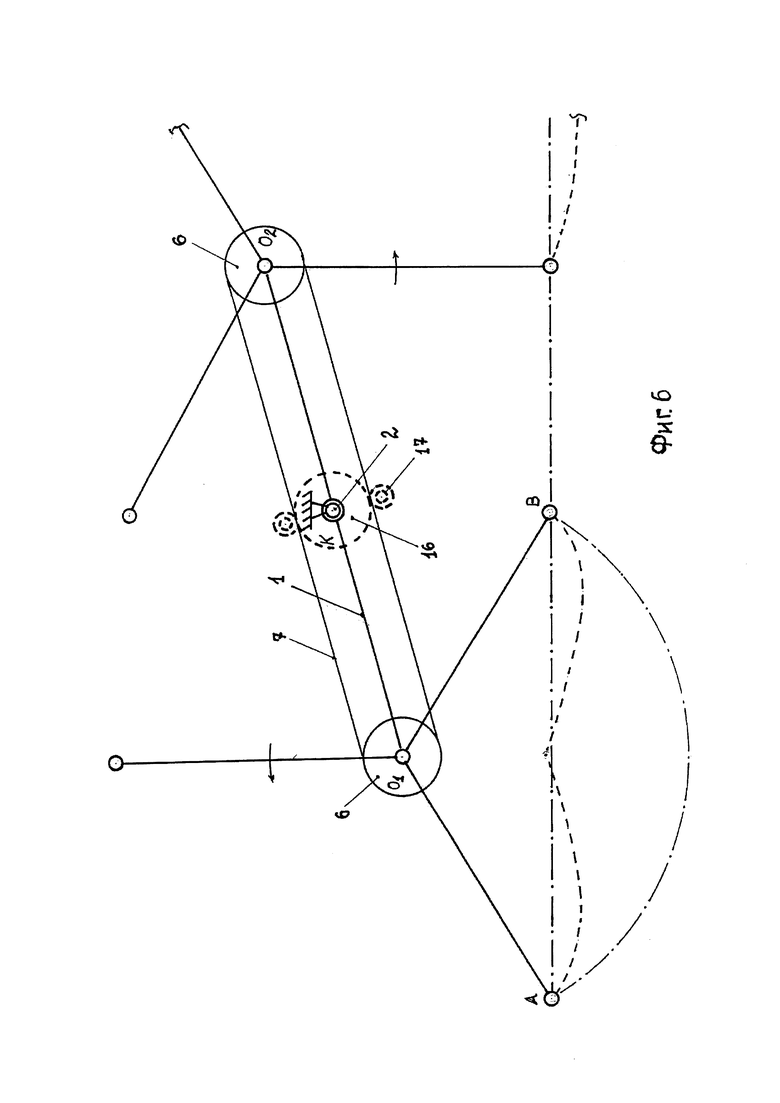
На фиг. 6 -движитель, шагающий колесными опорами с шагающими движителями с тремя опорами, расположенными на балансире, и траектории перемещения точки А в балансире и без балансира (штрихпунктирная линия), полученные посредством изготовленного макета.
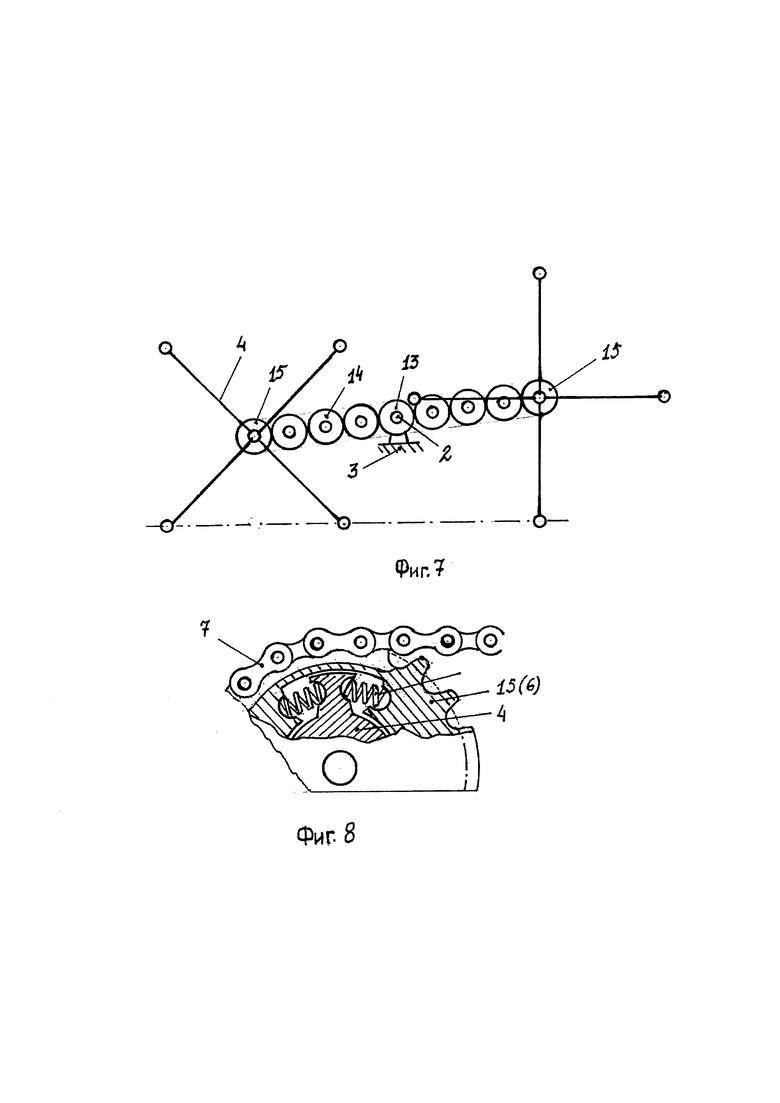
На фиг. 7 - движитель, шагающий колесными опорами, где связь между шагающими движителями, размещенными на коромысле, выполнена посредством зубчатой передачи от входного приводного зубчатого колеса и паразитных шестерен - к выходным, передающим вращение шагающим колесам через упругие муфты.
На фиг. 8 приведена известная упругая муфта.
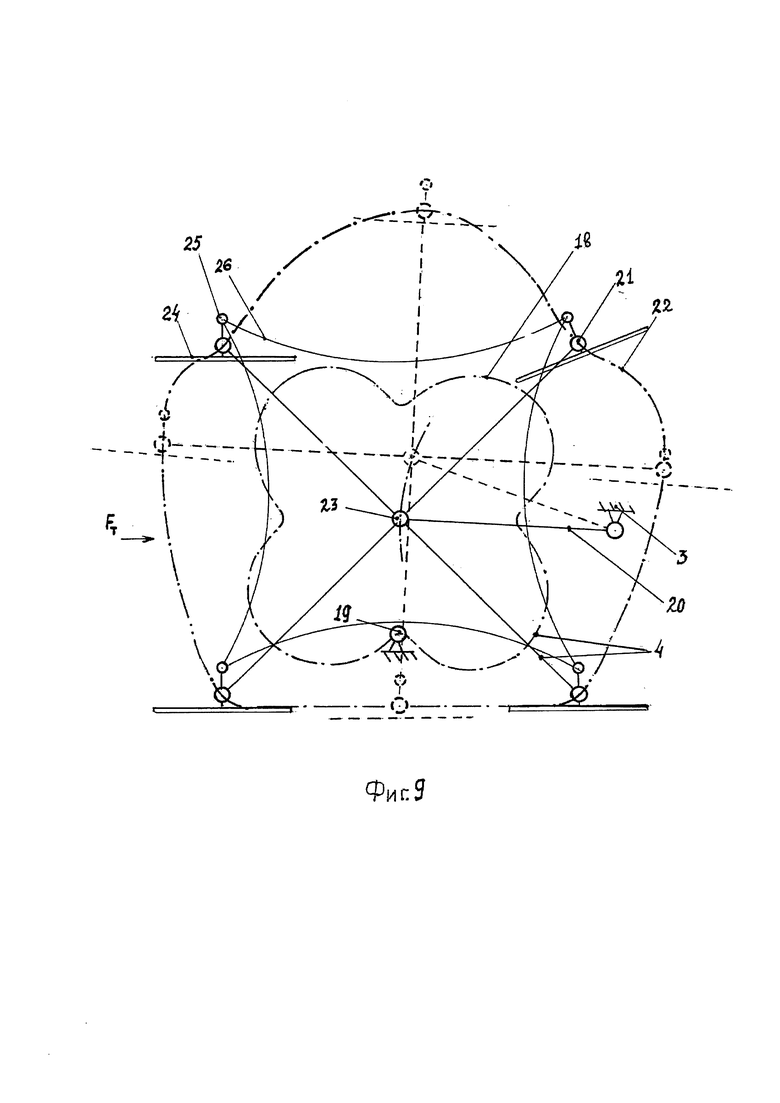
На фиг. 9 приведен движитель, шагающий колесными опорами варианта 2.
Движитель, шагающий колесными опорами варианта 1 (фиг. 5), содержит коромысло 1, поворотно установленное на шарнире 2, размещенном на звене 3 связанной с рамой транспорта (не указ.). На концах коромысла 1 установлены шагающие движители с опорами 4, шарнирно установленными на концах опор, башмаками 5. На осях шагающих движителей установлены звездочки 6 и связывающие их цепь 7. В средних частях цепь 7 с двух сторон прижата роликами (звездочками) 8, поджатыми относительно звена 3 пружинами 9. На фиг. 5 штриховой линией приведен другой вариант прижатия цепи 7 роликами 8, установленными на качалках 10 и прижатых посредством пружины 11.
Связь между находящимися на коромысле шагающими движителями, на фиг. 1 выполнен посредством шатуна 12, а на фиг. 7 - посредством зубчатых колес и содержит входное приводное зубчатое колесо 13, паразитные шестерни 14, выходные зубчатые колеса 15, передающие вращательное движение шагающим движителям 4 через упругую муфту.
На фиг. 6 приведена связь между шагающими движителями посредством цепной передачи использованием упругой муфты, например, приведенной на фиг. 8. Штриховой линией на фиг. приведена звездочка 16, установленная на приводном валу транспортного средства и ролики или пары роликов 17, удерживающие цепь 7 на звездочке во время движения цепи по звездочке.
Рассмотрим работу предложенного движителя, шагающего колесными опорами и для определения степени уменьшения величины вертикального колебания корпуса транспортного средства по сравнению с шагающим движителем, используемым без балансира, проведем расчет для движителя, шагающего колесными опорами с шестью опорами шагающих движителей.
На фиг. 1 в исходном положении левый шагающий движитель опирается об поверхность грунта двумя опорами, правый - одной. При этом опоры левого шагающего движителя находящиеся в контакте с поверхностью грунта, наклонены от перпендикуляров, проведенных из точек опор, в данном случае из точки В на 30°, а опора правого - стоит перпендикулярно к поверхности. В таком положении опор шагающих движителей шарнир соединения K коромысла с корпусом транспортного средства имеет наименьшее расстояние от поверхности грунта.
От толкающего усилия Fт опоры В и С2, находясь в контакте с поверхностью грунта, остаются неподвижными на поверхности грунта. При этом шагающие движители на коромысле, поворачиваясь: у левого, соответственно и ось O1 - поднимается, а правого O2 - опускается. И коромысло тоже, поворачиваясь по часовой стрелке, приподнимает шарнир соединения K с корпусом транспортного средства вертикально, до достижения им верхней точки вертикального колебания транспорта, которая достигается при достижении коромыслом параллельного положения с поверхностью грунта. Это достигается, когда шарниры колес O1' и O2' находятся на одинаковом расстоянии от поверхности грунта. Такое положение для шагающих движителей с шестью опорами достигается при равенстве углов О1' В О1'' и O2 С2 O2', равном 15°. Далее опоры шагающих движителей, поворачиваясь, опускают правое плечо коромысла до достижения ими состояния исходного положения, отличаясь только тем, что теперь двумя опорами о поверхность грунта опирается правый шагающий движитель. Тем самым шагающие движители в балансире совершают полшага в цикле шага (см. фиг. 2 точка O2'').
Определим при этом значение величины вертикального колебания транспортного средства.
Для этого определим расстояние точки от поверхности грунта.
Оно равно

Далее определим КИ. Для этого определим расстояние

Поскольку точка K расположена в середине гипотенузы треугольника  и прямая
и прямая  параллельна КИ, соответственно
параллельна КИ, соответственно

Теперь определим расстояние, при котором точка K принимает самое удаленное расстояние от поверхности грунта, то есть точки  . Оно равно
. Оно равно

Далее определим величину вертикального колебания Δ1 транспортного средства при использовании предложенного движителя, шагающего колесными опорами с шагающими движителями в балансире.
Оно равно 
Определим, во сколько раз уменьшается величина вертикального колебания транспортного средства при использовании предложенной конструкции с шагающими движителями в балансире, по сравнению использованием отдельного шагающего движителя, то есть  , где
, где  и
и  на фиг. 2. Для этого (фиг. 1) определим высоту сегмента
на фиг. 2. Для этого (фиг. 1) определим высоту сегмента  , где хорда
, где хорда 

Для примера, если брать приведенный движитель, шагающий колесными опорами с шестью опорами с диаметром 100 см, где опоры длиной 50 см, то у него  , и при использовании его для транспорта, транспорт испытывает такое вертикальное колебание.
, и при использовании его для транспорта, транспорт испытывает такое вертикальное колебание.
То есть при передвижении транспорта по грунтовой поверхности или по вспаханной земле, транспорт испытывает вертикальное колебание как транспорт с колесом качения.
Движитель, шагающий колесными опорами варианта 2 (фиг. 9) содержит, звено 3, связанное с рамой транспортного средства (не указана) ступицу 4, содержащую замкнутую направляющую 18, выполненную в виде паза (не указан). На фиг. 9 приведен только центровой профиль замкнутой направляющей 18 и взаимодействующий с ней опорный ролик 19 (на фиг. ось ролика), качалка 20, шарнир опоры 21 для соединения с башмаком и его траектория 22, ось движителя, шагающего колесными опорами 23, башмак 24, второй шарнир башмака 25, упругое звено 26, соединяющее вторые шарниры башмаков.
Движитель, шагающий колесными опорами варианта 2, работает следующим образом. При приложении толкающего усилия на транспорт, движитель приводится во вращательное движение, при котором ступица движителя, двигаясь своей направляющей по неподвижному ролику 19, приподнимается до принятия его опорой верхнего положения, поворачивая и качалку вверх. Далее, двигаясь по опорному ролику, опускает свою ось, поворачивая качалку вниз не давая транспорту совершать вертикальное колебание. Качалка при этом устойчиво удерживает движитель относительно транспорта.
Поскольку шарниры каждых соседних опор, несущих башмаки и вторые шарниры башмаков после установки на них упругого звена, составляют шарнирный параллелограмм, то опора, взаимодействующая с поверхностью грунта к выходу ее из контакта с грунтом, подготавливает к контакту с грунтом следующую опору, ориентируя плоскость опоры к поверхности грунта. При передвижении транспорта по грунтовой поверхности в момент контакта двух опор на неровности, опоры могут наклоняться в разные стороны, при которых звено 26 будет испытывать сжимающее и растягивающее усилия, поэтому использованы упругие звенья.
То есть при передвижении транспорта с приведенным движителем, шагающим колесными опорами по грунтовой поверхности или по вспаханной земле, транспорт испытывает почти аналогичное колебание, как транспорт с колесом качения.
Таким образом, при создании оптимальной конструкции предложенных движителей, шагающих колесными опорами и связывающей их подвески с рамой транспортного средства, можно получить шагающий движитель не уступающий характеристикам колеса качения по надежности конструкции и колебанию машины в процессе движения, при этом имея преимущество по проходимости и снижению давления на грунт башмаками опор, уступая колесу качения по достижимой скорости передвижения транспорта.
Приведенные на фигурах для иллюстрации варианты конструкций предложенного технического решения не исчерпывают и других возможных конструкций.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шагающее колесо | 2021 |
|
RU2763325C1 |
| Механизм шагающего движителя | 2019 |
|
RU2723923C1 |
| Шагающее колесо | 2020 |
|
RU2747337C1 |
| Шагающее колесо транспортного средства | 1989 |
|
SU1660997A1 |
| МЕХАНИЗМ (ВАРИАНТЫ) | 1996 |
|
RU2121093C1 |
| Шагающее колесо транспортного средства | 1987 |
|
SU1579796A1 |
| Способ страховки транспорта при передвижении по льду водной поверхности | 2017 |
|
RU2653348C1 |
| Колесо транспортного средства | 1989 |
|
SU1785915A1 |
| ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 1991 |
|
RU2006725C1 |
| ШАССИ ДЛЯ ПЕРЕДВИЖЕНИЯ ПО РАЗЛИЧНЫМ ОПОРНЫМ ПОВЕРХНОСТЯМ С КОЛЕСНО-ШАГОВЫМИ ДВИЖИТЕЛЯМИ | 2015 |
|
RU2628285C2 |
Изобретение относится к области транспортного машиностроения. Движитель, шагающий колесными опорами, содержит радиально расположенные опоры с башмаками на концах и механизм уменьшения вертикальных колебаний транспортного средства от колеса с шагающими опорами. Выполнен он в виде балансира с колесами с шагающими опорами, установленными на разных плечах балансира, поворотно связанного средней частью с рамой транспортного средства, которые между собой связаны так, что в цикле шага колес с шагающими опорами две опоры одного колеса находятся в фазе взаимодействия с поверхностью грунта, а другого - одна опора, и смещена на полшага от опор первого колеса. Во втором варианте движитель, шагающий колесными опорами, выполнен с механизмом уменьшения вертикальных колебаний транспорта, выполненным со ступицей с радиально расположенными опорами с башмаками на концах и снабженной замкнутой направляющей, и взаимодействующей с ней опорным роликом, установленным на звене, связанном с рамой транспортного средства. Сам движитель, шагающий колесными опорами, поворотно установлен на коромысле, связанном свободным концом со звеном. Технический результат - уменьшение вертикальных колебаний транспорта. 2 н. и 7 з.п. ф-лы, 9 ил.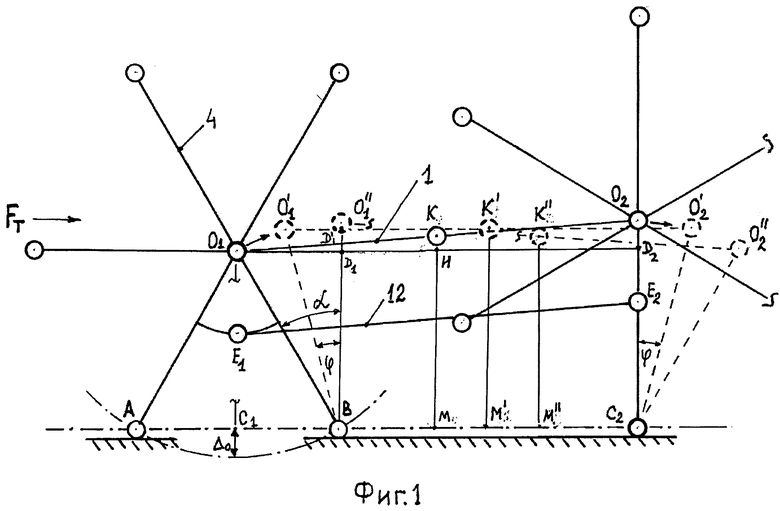
1. Движитель, шагающий колесными опорами, содержащий радиально расположенные опоры с башмаками на концах и механизм уменьшения вертикальных колебаний транспортного средства от колеса с шагающими опорами, отличающийся тем, что он выполнен в виде балансира с колесами с шагающими опорами, установленными на разных плечах балансира, поворотно связанного средней частью с рамой транспортного средства, которые между собой связаны так, что в цикле шага колес с шагающими опорами две опоры одного колеса находятся в фазе взаимодействия с поверхностью грунта, а другого - одна опора, и смещена на полшага от опор первого колеса.
2. Движитель, шагающий колесными опорами, по п. 1, отличающийся тем, что связь колес с шагающими опорами, установленных на балансире, осуществлена посредством шатуна, шарнирно связанного концами с указанными колесами так, что местоположение осей колес с шагающими опорами на балансире и шарниров колес с шагающими опорами, соединяющих шатун, образуют шарнирный параллелограмм, где шатун выполнен с возможностью обеспечения упругой связи между указанными колесами.
3. Движитель, шагающий колесными опорами, по п. 1, отличающийся тем, что связь колес с шагающими опорами, установленных на балансире, осуществлена посредством цепной передачи через звездочки, установленные на осях указанных колес, с передаточным отношением, равным единице, причем цепь между указанными колесами встречно упруго прижата прижимными звездочками или роликами.
4. Движитель, шагающий колесными опорами, по п. 1, отличающийся тем, что связь колес с шагающими опорами, установленных на балансире, осуществлена посредством цепной передачи через звездочки, установленные на осях колес, с передаточным отношением, равным единице, на упругих муфтах.
5. Движитель, шагающий колесными опорами, по п. 1 или 4, отличающийся тем, что шарниром поворота балансира является вал привода транспорта, на котором установлена приводная звездочка, входящая в зацепление с цепью, связывающей колеса с шагающими опорами, и которая прижата с двух сторон двумя парами звездочек или роликов.
6. Движитель, шагающий колесными опорами, по п. 1, отличающийся тем, что связь с шагающими опорами, установленными на балансире, осуществлена посредством зубчатых колес через упругие муфты, передающие вращение колесам с шагающими опорами.
7. Движитель, шагающий колесными опорами, по п. 1, отличающийся тем, что необходимые условия связи между колесами с шагающими опорами, установленными на балансире, осуществлены посредством снабжения каждого колеса с шагающими опорами мотор-колесом, выполненным по принципу шагающего двигателя, позволяющим управлять отдельно углом поворота каждого колеса с шагающими опорами в режиме совершения шага, в цикле шага опорами, движителя, шагающего колесными опорами.
8. Движитель, шагающий колесными опорами, с механизмом уменьшения вертикальных колебаний транспорта, выполненным со ступицей с радиально расположенными опорами с башмаками на концах и снабженной замкнутой направляющей, и взаимодействующей с ней опорным роликом, установленным на звене, связанном с рамой транспортного средства, отличающийся тем, что сам движитель, шагающий колесными опорами, поворотно установлен на коромысле, связанном свободным концом с упомянутым звеном.
9. Движитель, шагающий колесными опорами, по п. 8, отличающийся тем, что башмаки опор снабжены вторыми шарнирами, с которыми шарнирно связаны дополнительные звенья.
| Шагающее колесо | 2020 |
|
RU2730118C1 |
| Колесо транспортного средства | 1989 |
|
SU1785915A1 |
| Станина пресса | 1978 |
|
SU730607A1 |
| ШАГАЮЩЕЕ КОЛЕСО ТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2011 |
|
RU2455172C1 |

