Предлагаемое изобретение относится к авиатехнике и может быть применено при создании высокоэкономичных и маневренных беспилотных летательных аппаратов или аппаратов индивидуального пользования.
Известен способ, реализованный в аппарат с машущими крыльями [ж. Техника-молодежи, 9, 1987 г., с. 47] в котором реализован летательный принцип птерозавра. В данном способе в аппарате с помощью силовой установки обеспечивают колебания длинных жестких машущих крыльев, а с помощью балансирного устройства в передней части обеспечивают продольную устойчивость. Недостатками этого способа являются сложность механизма управления крыльями, а также отсутствие механизма изменения угла атаки крыла в различных фазах взмаха, что не позволяет крыльям создать необходимую тягу для самостоятельного взлета и поступательного движения.
Известен также способ, реализованный в аппарате [ж. Техника - молодежи, 11, 1993г., с. 8], в котором реализован летательный принцип стрекозы. В данном способе две пары жестких легких крыльев, шарнирно соединенных с корпусом, приводят в движение мускульной силой пилота или двигателем. В различных фазах взмаха концы крыльев изменяют угол атаки (осуществляется оригинальным механизмом автоматической подкрутки концов крыльев). Недостатком способа является легкость крыльев, что не позволяет достичь большой частоты взмахов, а также неизменяемый угол атаки всего крыла в разных фазах взмаха в одной плоскости, что не позволяет добиться необходимой тяги для самостоятельного взлета и зависания.
Известен также способ, в котором реализован летательный принцип птиц-парителей (орлов, коршунов, буревестников) [ж. Техника-молодежи, 1, 1994г., с. 16]. В аппарате два свободнонесущих крыла, шарнирно прикрепляют к фюзеляжу. Крыло выполняют таким образом, что обеспечивают осевую крутку консолей крыльев в зависимости от характера и степени аэродинамических нагрузок. При взмахе крыла вверх и вниз устанавливают некоторые углы атаки. Недостатком способа является легкость крыльев, что не позволяет достичь большой частоты взмахов, а также невозможность регулирования угла атаки всего крыла в фазах взмаха в одной плоскости, что не позволяет добиться необходимой тяги для самостоятельного взлета и зависания.
Известен способ, реализованный в летательном аппарате с машущими крыльями [RU № 2128132], в котором крылья выполняют наборными из однотипных сегментов, соединенных напряженными гибкими связями, что позволяет крыльям быть гибкими вдоль длины крыла и жесткими в поперечном сечении, а управляют маханием и углами атаки крыла с помощью механической системы. Недостатком способа является сложность изменения угла атаки.
Известен способ [заявка на изобретение № 97107279/28], в которой в подвеску крыла включают уключину, внутри подвижной детали которой размещают шарнир крыла. Шарнир позволяет совершать крылом машущие движения в вертикальной плоскости, а уключина позволяет переносить плоскость крыла вперед-назад. Однако, в данном способе создание машущих движений с одновременным перемещением плоскости крыла вперед-назад и изменением угла атаки очень сложный, что делает его громоздким и ненадежным.
Известен способ, реализованный в аппарате [патент США N 4712749, 1987г.], в котором с каждой стороны фюзеляжа располагают по два жестких машущих крыла, жесткие оси которых располагают в качающихся втулках, основание которых жестко закрепляют на фюзеляже, а подвижные части, имеющие регулируемые по высоте рычаги, шарнирно присоединяют к силовой установке. К концу оси каждого крыла прикрепляют рычаги, которые приводят в движение серводвигателями. Взмахи крыльев осуществляют путем воздействия силовой установки на качающиеся втулки, а изменение угла атаки в разных фазах взмаха осуществляют путем воздействия серводвигателей на рычаги, закрепленные на концах осей крыльев. Недостатком способа является то, что крылья совершают колебательные движения только в вертикальной плоскости, что не позволяет достичь надежных взлетных характеристик. Недостатком является и сложность механизма управления углами атаки крыльев, и отсутствие прямой связи углов атаки с фазами взмаха, что требует установки сложного механизма обратной связи.
Известен способ, реализованный в махолете «Шмель» [заявка на изобретение № 2001111720 от 26.04.2001] принятый за прототип, в котором ось каждого крыла, имеющего аэродинамическое сечение, которых располагают по два с каждой стороны корпуса махолета, сочленяют своим концом с водилом, которым совершают круговое движение. Валы водил соединяют с силовой установкой. Оси закрепляют на расстоянии от конца, которое определяют углом размаха крыла, на подшипниках одной оси крестовины (например, вертикальной) шарнирной передачи типа «кардан», а подшипники другой оси крестовины (горизонтальной) этой передачи соединяют с подвижной цилиндрической втулкой и располагают внутри ее. При этом цилиндрическую втулку располагают на подшипниках скольжения внутри основания, жестко прикрепленного к корпусу аппарата, с возможностью регулируемого кругового перемещения в нем, а водилы вращают единым приводом. Водилы передней пары крыльев сдвигают относительно задних на угол 180 градусов.
Способ позволяет совершать взмахи крыльев вверх-вниз, вперед-назад по конусной траектории оси крыла, позволяет при этом изменять угол атаки крыльев. Недостатками способа является то, что применяемое изменение углов атаки крыльев не позволяет управлять независимо каждым крылом, что не позволяет достичь быстрого маневрирования аппарата.
Техническая задача изобретения состоит в упрощении способа создания подъемной силы, в повышении его эффективности и надежности.
Указанный технический результат достигается тем, что в способе создания подъемной силы летательного аппарата, в котором вращают четыре или более крыльев, имеющих аэродинамическое сечение, которые располагают по два или более с каждой стороны корпуса аппарата, шарнирно соединенные через карданное соединение с корпусом под неподвижными крыльями, оси которых ометывают конусную поверхность, а положение сечения крыльев изменяют для управления направлением и скоростью полета, согласно изобретению независимо изменяют скорость вращения и положение сечения каждого крыла. При этом через блок электронного управления изменяют скорость вращения электродвигателя каждого крыла, этим изменяют скорость вращения водила, сочлененного с осью крыла и скорость конусно-кругового движения крыла. Также через блок электронного управления управляют перемещением штока шагового линейного электродвигателя каждого крыла, этим изменяют положение крестовины карданного соединения крыла с корпусом и положение сечения крыла относительно корпуса. Для обеспечения вертикальной подъемной силы для зависания аппарата, плоскости сечений всех крыльев на части траектории движения крыла вниз располагают горизонтально, на части движения крыла вверх плоскости сечений всех крыльев располагают вертикально. Для обеспечения управления скоростью и направлением полета аппарата располагают плоскости сечения независимо каждого крыла с отрицательным углом атаки на части траектории движения крыла вниз и с положительным углом атаки крыла на части траектории крыла вверх в зависимости от скорости и траектории полета.
Отличие от прототипа заключается в новой форме воздействия независимо на каждое крыло, обеспечивающего машущие движения с одновременным изменением угла атаки каждого крыла. Это обуславливает соответствие технического решения критерию «новизна».
Благодаря указанной новой совокупности существенных признаков обеспечивается новый технический результат, заключающийся в том, что эффективно и надежно обеспечиваются машущие движения с одновременным независимым изменением угла атаки каждого крыла.
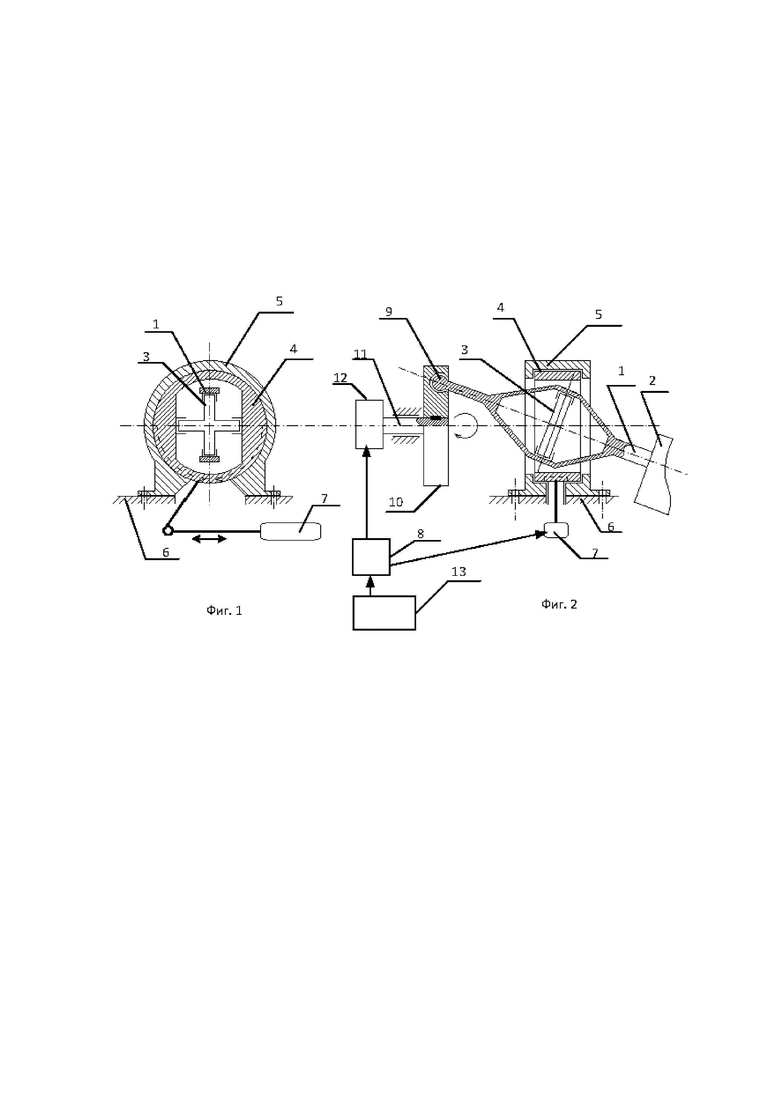
На рисунке Фиг. 1 и Фиг. 2 показана схема механизма (проекции), обеспечивающего конусно-круговые машущие движения крыла с одновременным перемещением плоскости крыла вперед-назад и изменением угла атаки крыла.
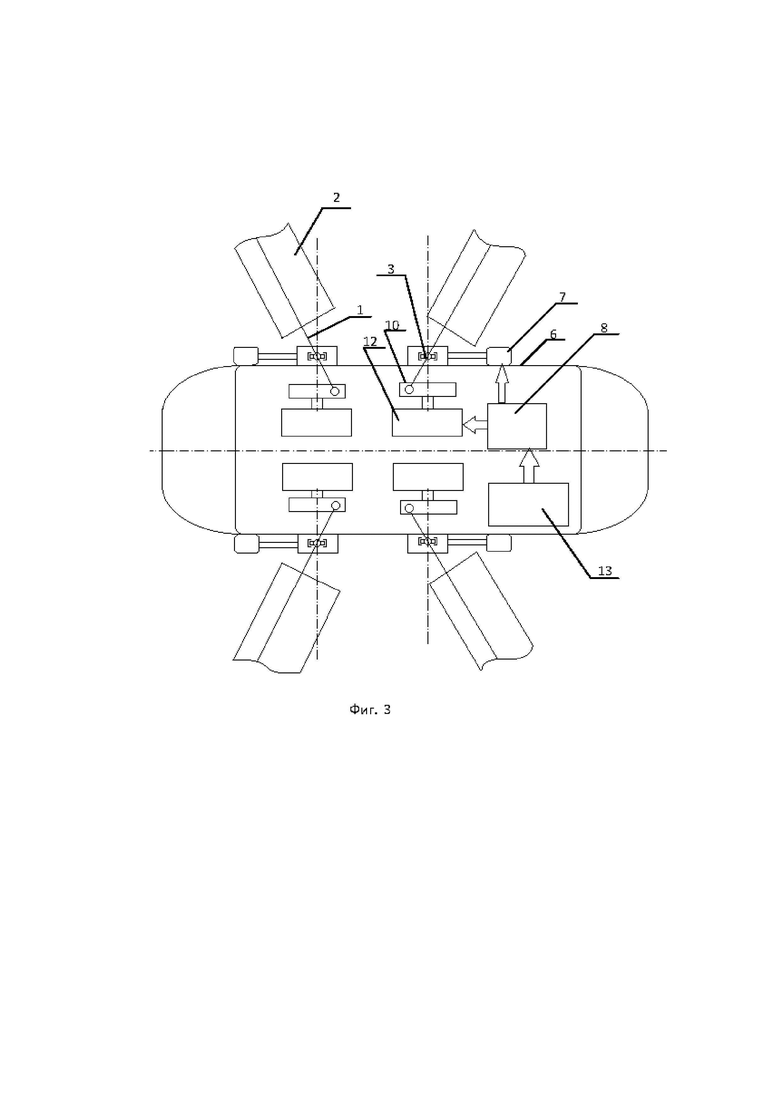
На рисунке Фиг. 3 показана схема сочленения крыльев, двигателей и корпуса аппарата.
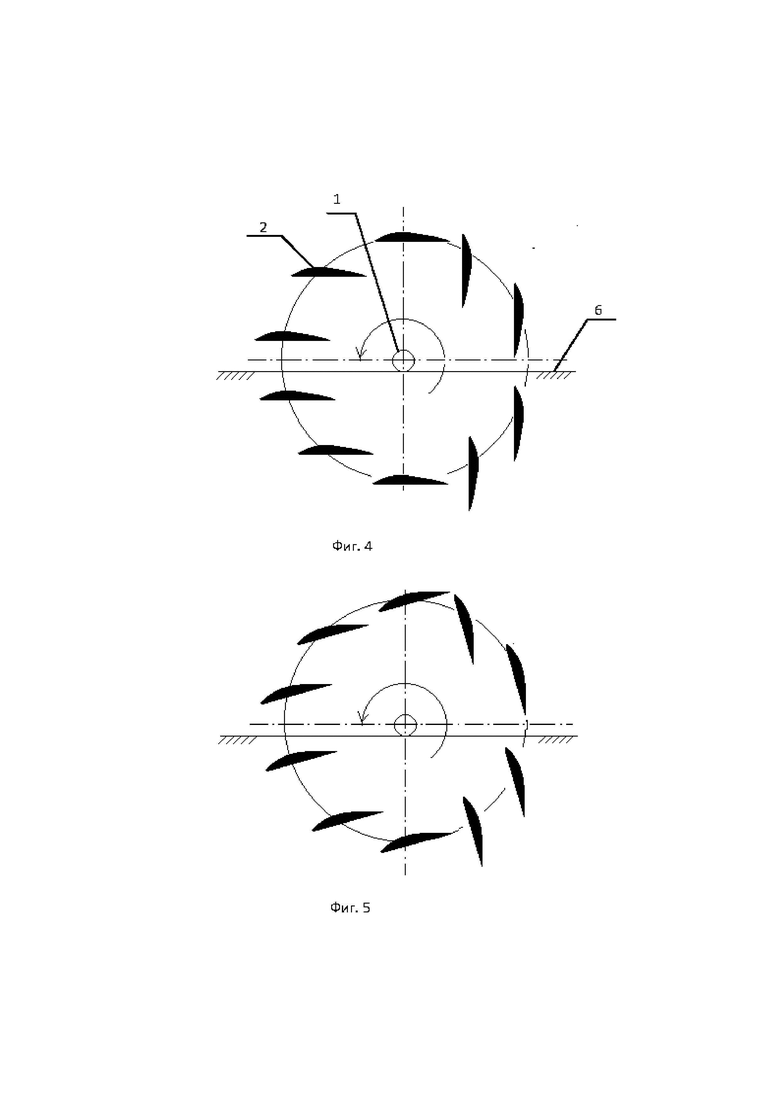
На рисунках Фиг. 4 и Фиг. 5 показана схема расположения сечения каждого крыла при конусно-круговом движении каждого крыла.
На рисунке Фиг. 1 и Фиг. 2 ось (1), крыла (2) соединена через подшипник с вертикальной осью крестовины (3) карданной передачи, горизонтальная ось которой соединена через подшипники с цилиндрической подвижной втулкой (4), которая через подшипник скольжения соединена с основанием (5), которое жестко прикреплено к корпусу (6) аппарата. Цилиндрическая втулка (4) соединена с валом шагового электрического двигателя линейного перемещения (7), который подключен к блоку электронного управления (8) аппарата. Шаровидный конец (9) оси (1) крыла (2) сочленен со сферическим углублением (или подшипником) в водиле (10), вал (11) которого соединен с электродвигателем (12), который подключен к блоку электронного управления (8) аппарата. Электропитание двигателей (7, 12) выполняют от источника (13) через блок электронного управления (8).
На рисунке Фиг. 3 показана схема сочленения крыльев (2), корпуса (6) и электрических двигателей (7, 12) аппарата, на которой четыре крыла (2) расположены по два с каждой стороны корпуса (6). Ось (1) каждого крыла закреплена на крестовине (3) и сочленена с водилом (10) в соответствии с рисунком Фиг. 1. Валы (11) водил (10) передних и задних крыльев соединены с электродвигателями (12). Цилиндрические втулки (4) соединены с валами шаговых электрических двигателей линейного перемещения (7).
На рисунке Фиг. 4 показана схема расположения сечения каждого крыла (2) при его конусно-круговом движении в режиме вертикального взлета аппарата.
На рисунке Фиг. 5 показана схема расположения сечения каждого крыла (2) при его конусно-круговом движении в режиме поступательного движения аппарата.
Устройство работает следующим образом: Двигатель (12) (фиг.1, фиг.2, фиг.3), скорость вращения которого регулируется блоком управления (8), через вал (11) создает круговое движение водила (10). Через шаровидные концы (9) (или подшипник) круговое движение передается осям (1) крыльев (2). Так как оси (1) закреплены на подшипниках вертикальных осей крестовин (3) карданной передачи, то сечение плоскости крыльев на всем конусно-круговом движении крыла (2) будет находиться в положении, создаваемом положением вертикальной оси крестовины (3). Положение вертикальной оси крестовины (3) регулируется положением ее горизонтальной оси, закрепленной через подшипники с втулкой (4). Положение втулки (4) регулируется линейным перемещением вала двигателя (7).
При этом для повышения эффективности создания подъемной силы и силы горизонтального перемещения, крыло выполняют аэродинамического профиля с выпуклостью в верх верхней поверхности крыла и вогнутостью в верх нижней поверхности крыла (аналог - ложка).
Воздействием от блока управления (8) на каждый из двигателей (12) обеспечивают конусно-вращательное движение каждого крыла (2) (фиг.1, фиг. 2), со своей скоростью вращения, чем создают одинаковые или разные подъемные и движущие силы крыльев. Воздействием от блока управления (8) на каждый двигатель (7) изменяют наклон сечения плоскости каждого крыла (2), чем обеспечивают маневренные возможности аппарата (фиг.4, фиг. 5).
Таким образом, осуществляют независимое управляемое движение каждого крыла вверх-вниз и вперед-назад, при этом независимо регулируется угол атаки каждого крыла, подобно тому, как это осуществляется у мух, шмелей, пчел (следует отметить, что траектория движения крыла у них более сложная). Для повышения эффективности полета над подвижными крыльями располагают неподвижные крылья аэродинамического профиля, жестко закрепленные на корпусе.
В предлагаемом способе за счет раздельного управления скоростью конусно-кругового движения и углами атаки крыльев достигается улучшение взлетных, полетных и посадочных характеристик летательного аппарата и упрощение управления крыльями.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМИ КРЫЛЬЯМИ | 1997 |
|
RU2128132C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ТИПА ОРНИТОПТЕРА | 2002 |
|
RU2236988C2 |
| ДИРИЖАБЛЬ | 1989 |
|
RU2009072C1 |
| МАХОЛЕТ | 1993 |
|
RU2063367C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМ КРЫЛОМ | 2010 |
|
RU2452660C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЕМ В ВИДЕ МАШУЩИХ КРЫЛЬЕВ | 2002 |
|
RU2217355C1 |
| МАХОЛЕТ | 2001 |
|
RU2222476C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2006 |
|
RU2330793C1 |
| СПОСОБ СОЗДАНИЯ ПОДЪЕМНОЙ СИЛЫ ЛЕТАТЕЛЬНОМУ АППАРАТУ ВЕРТИКАЛЬНОГО ВЗЛЕТА | 2003 |
|
RU2305649C2 |
| УПРАВЛЯЕМОЕ КРЫЛО ПРОПЕЛЛЕРНОГО ТИПА | 2015 |
|
RU2583426C1 |
Изобретение относится к авиатехнике и может быть применено при создании высокоэкономичных и маневренных беспилотных летательных аппаратов или аппаратов индивидуального пользования. Электродвигатель, скорость вращения которого регулируется блоком управления, создает круговое движение водила. Через шаровидные концы круговое движение передается осям крыльев. Так как оси закреплены на подшипниках вертикальных осей крестовин карданной передачи, то сечение плоскости крыльев на всем конусно-круговом движении крыла будет находиться в положении, создаваемом положением вертикальной оси крестовины. Положение вертикальной оси крестовины регулируется положением ее горизонтальной оси, закрепленной через подшипники с втулкой. Положение втулки регулируется линейным перемещением вала двигателя. Для повышения эффективности создания подъемной силы крыло выполняют аэродинамического профиля с выпуклостью в верх верхней поверхности крыла и вогнутостью в верх нижней поверхности крыла. 5 ил.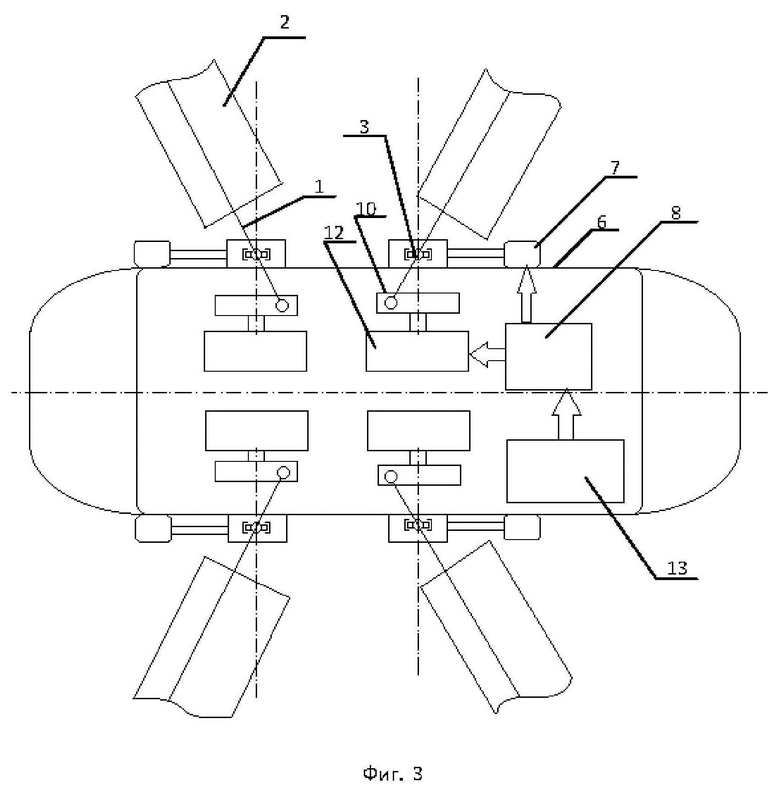
Способ создания подъемной силы летательного аппарата, в котором вращают четыре или более крыльев, имеющих аэродинамическое сечение, которые располагают по два или более с каждой стороны корпуса аппарата, шарнирно соединенные через карданное соединение с корпусом под неподвижными крыльями, оси которых ометывают конусную поверхность, а положение сечения крыльев изменяют для управления направлением и скоростью полета, отличающийся тем, что независимо изменяют скорость вращения и положение сечения каждого крыла, при этом через блок электронного управления изменяют скорость вращения электродвигателя каждого крыла, этим изменяют скорость вращения водила, сочлененного с осью крыла, и скорость конусно-кругового движения крыла, и через блок электронного управления управляют перемещением штока шагового линейного электродвигателя каждого крыла, этим изменяют положение крестовины карданного соединения крыла с корпусом и положение сечения крыла относительно корпуса, причем для обеспечения вертикальной подъемной силы для зависания аппарата, плоскости сечений всех крыльев на части траектории движения крыла вниз располагают горизонтально, на части движения крыла вверх плоскости сечений всех крыльев располагают вертикально, для обеспечения управления скоростью и направлением полета аппарата располагают плоскости сечения независимо каждого крыла с отрицательным углом атаки на части траектории движения крыла вниз и с положительным углом атаки крыла на части траектории крыла вверх в зависимости от скорости и траектории полета.
| RU 2001111720 А, 10.05.2003 | |||
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМИ КРЫЛЬЯМИ | 1997 |
|
RU2128132C1 |
| RU 97107279 А, 27.04.1999 | |||
| US 4712749 A1, 15.12.1987 | |||
| МАШУЩИЙ ДВИЖИТЕЛЬ | 1993 |
|
RU2089461C1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ПОДЪЕМНОЙ СИЛЫ И СИЛЫ ТЯГИ | 2007 |
|
RU2337857C1 |

