Предлагаемое изобретение относится к авиатехнике и может быть применено при создании высокоэкономичных летательных аппаратов индивидуального пользования.
Известен аппарат с машущими крыльями (ж. Техника-молодежи, 9, 1987 г., с. 47), в котором реализован летательный принцип птерозавра. В данном аппарате с помощью силовой установки обеспечивают колебания длинных жестких машущих крыльев, а с помощью балансирного устройства в передней части обеспечивают продольную устойчивость. Недостатками этого устройства являются жесткость крыльев, что не позволяет увеличить частоту взмахов, а также отсутствие механизма изменения угла атаки крыла в различных фазах взмаха, что не позволяет крыльям создать необходимую тягу для поступательного движения.
Известен также аппарат с машущими крыльями, в котором реализован летательный принцип птицы колибри (ж. Моделист-конструктор, 12, 1986 г., с. 17, ж. Техника-молодежи, 9, 1978 г., с. 58). В данном аппарате два крыла расположены в двух параллельных плоскостях. Несущие плоскости крыльев вращают навстречу друг другу и вблизи плоскости симметрии происходит как-бы взаимозаменяемость крыльев, что обеспечивает изменение угла атаки и обеспечивает тягу. Однако, хотя автор и доказывает, что предлагаемый аппарат является аппаратом с машущими крыльями, тем не менее это вертолет с соосными винтами, у которого в двух параллельных плоскостях имеется по одной лопасти, что лишь создает дополнительные проблемы массо-инерционного характера и не дает преимуществ по сравнению с двумя и более лопастями в плоскости.
Известен также аппарат, в котором реализован летательный принцип стрекозы (ж. Техника - молодежи, 11, 1993 г., с. 8). В данном аппарате две пары жестких легких крыльев приводятся в движение пилотом или двигателем. В различных фазах взмаха концы крыльев изменяют угол атаки (осуществляется оригинальным механизмом автоматической подкрутки концов крыльев). Недостатком аппарата является жесткость и легкость крыльев, что не позволяет достичь большой частоты взмахов, а также неизменяемый угол атаки всего крыла в разных фазах взмаха, что не позволяет добиться необходимой тяги для самостоятельного взлета.
Известен также аппарат, в котором реализован летательный принцип птиц-парителей (орлов, коршунов, буревестников) (ж. Техника-молодежи, 1, 1994 г., с. 16). В аппарате два свободнонесущих крыла шарнирно прикреплены к фюзеляжу. Крыло выполнено таким образом, что обеспечивается осевая крутка консолей крыльев в зависимости от характера и степени аэродинамических нагрузок. При взмахе вверх и вниз крыло устанавливается на некоторые углы атаки. Недостатком аппарата является жесткость и легкость крыльев, что не позволяет достичь большой частоты взмахов, а также невозможность регулирования угла атаки всего крыла в фазах взмаха, что не позволяет добиться необходимой тяги для самостоятельного взлета.
Наиболее близким к изобретению является аппарат (патент США N 4712749, 1987 г., автор Duke Fox), в котором с каждой стороны фюзеляжа расположены по два жестких машущих крыла, жесткие оси которых расположены в качающихся втулках, основание которых жестко закреплено на фюзеляже, а подвижные части, имеющие регулируемые по высоте рычаги, шарнирно присоединены к силовой установке. К концу оси каждого крыла прикреплены рычаги, которые соединены с серводвигателями. В аппарате взмахи крыльев осуществляются путем воздействия силовой установки на качающиеся втулки, а изменение угла атаки в разных фазах взмаха осуществляется путем воздействия серводвигателей на рычаги, закрепленные на концах осей крыльев. Недостатками аппарата являются жесткость крыльев, что не позволяет достичь высокой частоты и энергетичности взмахов, сложность механизма управления углами атаки крыльев, отсутствие прямой связи углов атаки с фазами взмаха.
Техническим результатом изобретения является улучшение взлетных, полетных и посадочных характеристик летательного аппарата и упрощение управления крыльями.
Технический результат достигается за счет высокой частоты и энергичности взмахов крыльев и управления углами атаки, согласованного с фазами взмахов крыльев.
Технический результат достигается тем, что крылья выполнены из жестких элементов аэродинамического сечения, которые соединены гибкими напряженными связями, и установлен механизм автоматического и согласованного с фазами взмаха крыльев регулирования угла атаки крыльев в различных фазах взмаха.
На фиг. 1 показано устройство крыла (1), в котором несколько параллельно расположенных элементов аэродинамического сечения (2) соединены гибкими напряженными связями (3). Элементы в местах прохождения через них связей усилены. В качестве усилителей могут быть использованы титановые трубки, к концам которых приварены фланцы, укрепленные раскосами. К фланцам прикреплены нервюры. Весь элемент обтянут прочной тканью. В первом от корпуса элементе жестко закреплена ось крыла (4) с Т-образной перекладиной (5), которая расположена параллельно плоскости крыла.
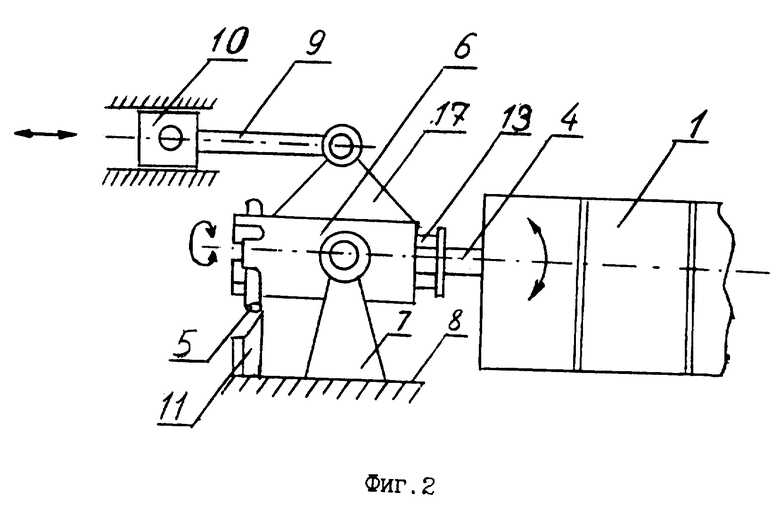
На фиг. 2 показано устройство обеспечения взмахов крыла, в котором ось крыла (4) расположена в качающейся втулке (6), основание (7) которой соединено с корпусом (8), а рычаг (17) подвижной части шарнирно соединен со штоком (9) силовой установки (10).
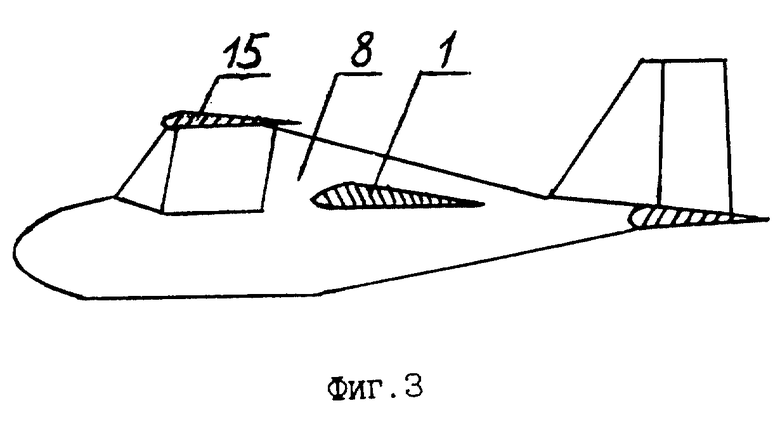
На фиг. 3 показано расположение дополнительных немашущих крыльев (15) по отношению к корпусу (8) и машущим крыльям (1).
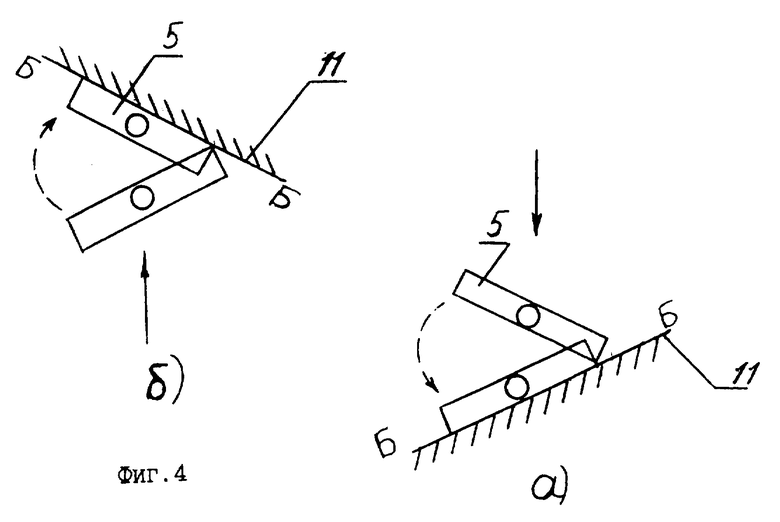
На фиг. 4 показан механизм автоматического регулирования угла атаки крыла в различных фазах взмаха, на котором в (а) показано положение Т-образной перекладины оси крыла (5) по отношению к клинообразному выступу (11) в крайней верхней фазе взмаха крыла, а в (б) - в крайней нижней фазе.
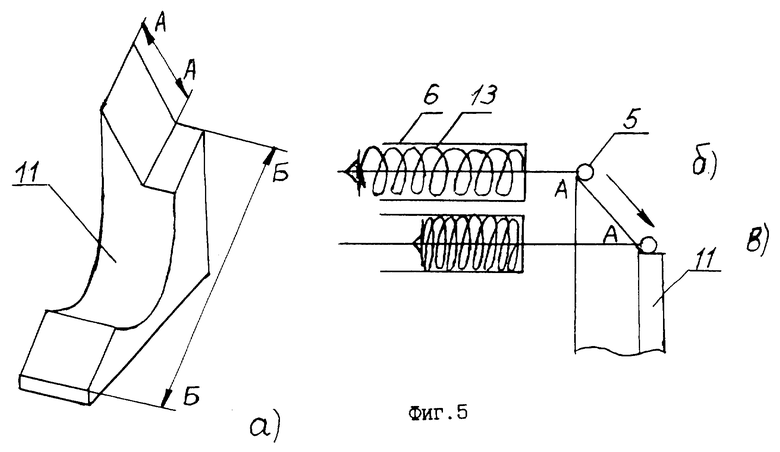
На фиг. 5а показана конструкция клинообразного выступа (11) и принцип действия (фиг. 5б, в) при переводе Т-образной перекладины из одной выемки (12) втулки в другую.
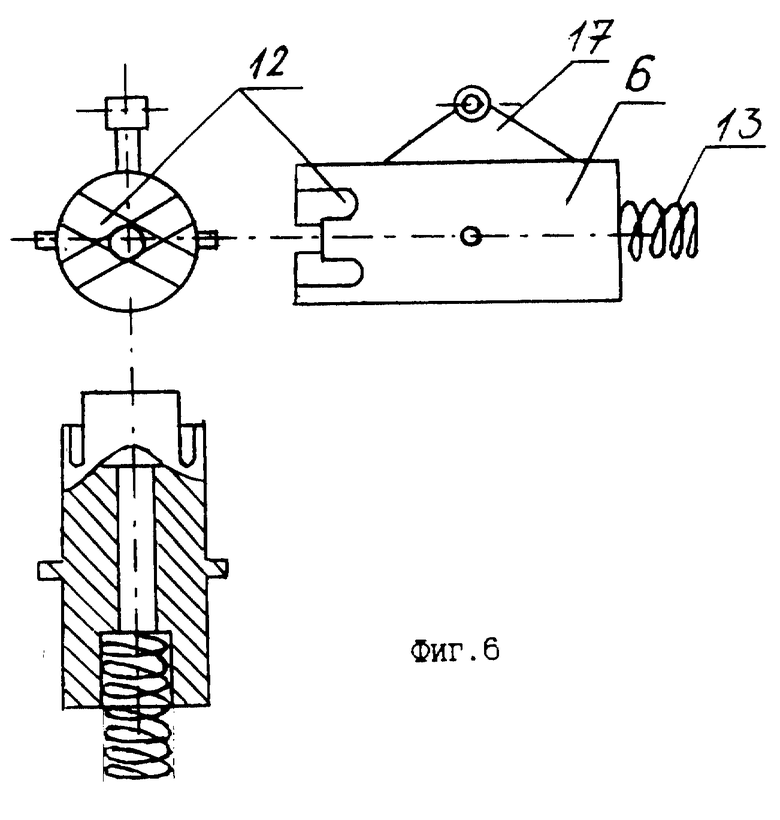
На фиг. 6 показана конструкция втулки (6), имеющей выемки (12), пружину (13) и регулируемый по высоте рычаг (17).
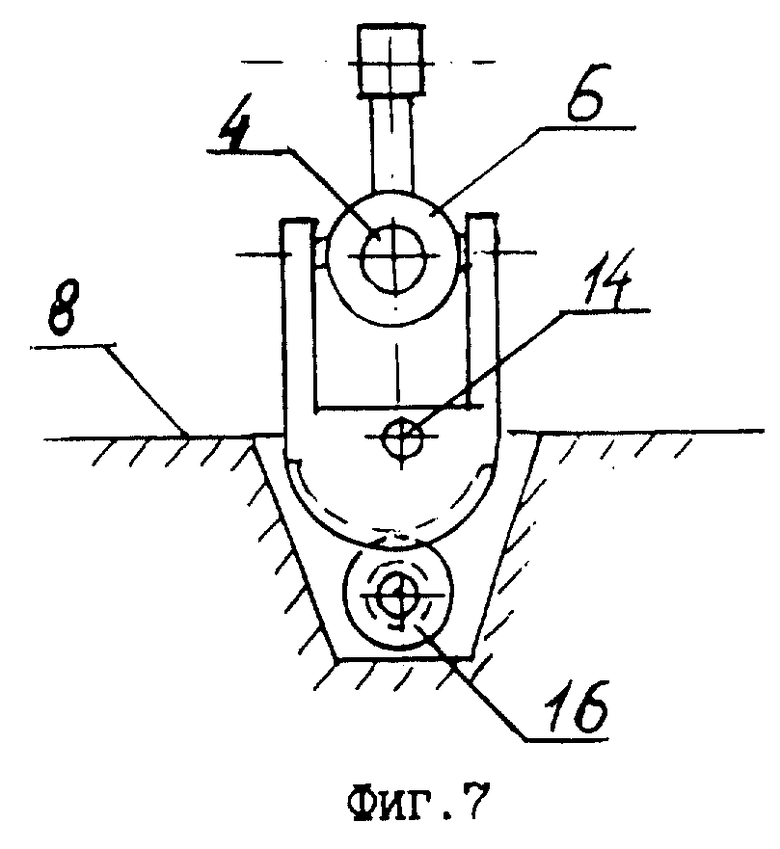
На фиг. 7 показана конструкция шарнирного крепления основания (7) втулки на оси (14), закрепленной на корпусе (8).
Взмах крыла осуществляют силовой установкой (10), которая через возвратно-поступательное движение штока (9) качает втулку (6) по отношению к основанию втулки (7) и корпусу (8). Ось крыла (4) передает это движение крылу (1). Крыло, состоящее из жестких, однотипных элементов аэродинамического сечения, соединенных двумя или более напряженными гибкими связями (например, натянутыми тросиками), проходящими внутри элементов, обладает продольной гибкостью, что позволяет выполнять взмахи энергично и с большой частотой.
Автоматическое регулирование угла атаки в различных фазах взмаха осуществляют изменением положения Т-образной перекладины (5) в момент прохождения крайнего верхнего или нижнего положений крыла. Если крыло идет вверх, то угол атаки положительный, Т-образная перекладина идет вниз. При подходе перекладины к плоскости А-А клиновидного выступа (11) она начинает выдвигаться клином из выемки (фиг. 5б). Как только конец Т-образной перекладины достигнет плоскости (Б-Б), он начинает тормозиться (фиг. 3а), а другой конец продолжает движение до установленного плоскостью Б-Б положения. При движении крыла вниз Т-образная перекладина движется вверх, фиксируется пружиной (13) в выемке (12) втулки (6) и имеет положение, соответствующее отрицательному углу атаки. При осуществлении полного взмаха вниз Т-образная перекладина перемещается к верхнему клинообразному выступу (11), где аналогично тому, как осуществлялось изменение в нижнем положении, изменяют положение Т-образной перекладины (фиг. 3б), а значит и положение крыла.
Таким образом, осуществляются взмахи крыла вверх-вниз и при этом автоматически регулируется угол атаки крыла, подобно тому, как это осуществляется у "тяжелых" птиц (например, ворона, глухарь, гусь).
При наличии только машущих крыльев будет трудно добиться равномерного горизонтального полета, поэтому дополнительно установлена пара немашущих крыльев (15), которые выполнены также гибкими. Размещение их впереди и выше по отношению к машущим позволяет увеличить подъемную силу немашущих крыльев за счет отсоса воздуха из-под них при движении машущих крыльев.
При осуществлении полета на малых скоростях или зависания на одном месте необходимо, чтобы машущее крыло создавало только подъемную силу, т.е. при движении крыла вниз угол атаки должен быть нулевым, а при движении вверх угол атаки максимальный (близкий к 90o). Это обеспечено угловым перемещением основания (7) относительно корпуса (8) на оси (14) при помощи, например, зубчатой передачи, состоящей из шестерни (16) и сегмента шестерни, жестко соединенного с основанием (7) втулки (фиг. 7). При этом выемка (12) на втулке (6), фиксирующая крыло на взмахе вниз, расположена параллельно корпусу, а выемка, фиксирующая крыло на взмахе вверх, расположена почти вертикально.
Для выполнения более экономичного полета необходимо изменять амплитуду взмахов. Это обеспечено регулированием по высоте рычагов (17), например, таким же образом, как в прототипе (патент США N 4712749), при этом выполняется соответствующее перемещением (вверх-вниз) клинообразных выступов (11).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ создания подъемной силы летательного аппарата | 2024 |
|
RU2831867C1 |
| СПОСОБ СОЗДАНИЯ ПОДЪЕМНОЙ СИЛЫ ЛЕТАТЕЛЬНОМУ АППАРАТУ ВЕРТИКАЛЬНОГО ВЗЛЕТА | 2003 |
|
RU2305649C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЕМ В ВИДЕ МАШУЩИХ КРЫЛЬЕВ | 2002 |
|
RU2217355C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМ КРЫЛОМ | 2010 |
|
RU2452660C2 |
| МУСКУЛЬНЫЙ ПЛАВАЮЩИЙ МАХОЛЕТ "ЛЕБЕДУШКА" | 2004 |
|
RU2304546C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2011 |
|
RU2480378C1 |
| Модель птицелета | 1986 |
|
SU1830353A1 |
| БИОАЭРОДИНАМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМИ КРЫЛЬЯМИ | 2009 |
|
RU2392189C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ТЯЖЕЛЕЕ ВОЗДУХА | 1998 |
|
RU2142388C1 |
| ДИРИЖАБЛЬ | 1989 |
|
RU2009072C1 |
Аппарат содержит приводимые в движение силовой установкой машущие крылья, которые набраны из жестких элементов, имеющих аэродинамическое сечение и соединенных несколькими гибкими напряженными связями, механизм автоматического изменения угла атаки крыльев в верхней и нижней фазах взмаха и механизм ручного регулирования диапазона изменения угла атаки. Дополнительно жестко установлены неподвижные крылья выше и ближе к передней части аппарата по отношению к машущим крыльям. Изобретение направлено на улучшение взлетных, полетных и посадочных характеристик. 3 з.п. ф-лы, 7 ил.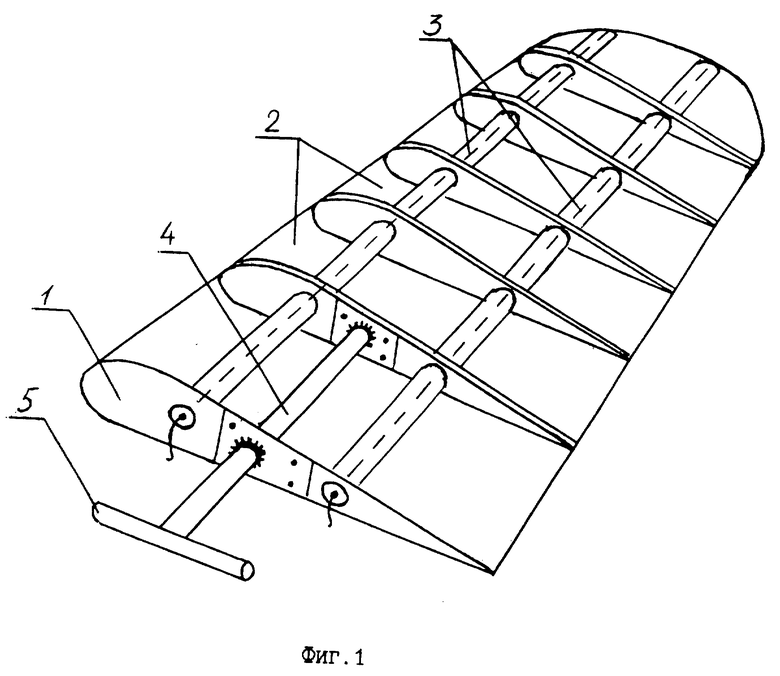
| 0 |
|
SU170305A1 |
