Изобретение относится к строитель-20 ному машиностроению, в частности к стрелочным манипуляторам и агрегатам, и может быть использовано для меха- йизации и автоматизации работ в строительстве.25
Цель изобретения. - улучшение динамических и точностных характеристик За счет устранения зазооов в кинематической цепи.
На чертеже представлен манипулятор,30 Ьбщий вид.
Манипулятор содержит основание 1 и исполнительные устройства 2. Каждое исполнительное устройство имеет корпус 3, внутри которого установлена 35 выдвижная штанга k, несущая рабочий Ърган, например форсунку р. Штанга 4 ;пружиной 6 поджата к основанию корпу- ta 3.
.40
На конце штанги ч одним концом закреплен гибкий элемент 7, второй конец которого закреплен на барабане 8, жестко установленном на основании. Упругие звенья 9 соединяют концы криво- ,с шипов 10 с соответствующими концами Ведомых элементов 11. Каждый ведомый Элемент 11 жестко закреплен с соответствующим корпусом 3 исполнительного устройства 2,eg
Манипулятор работает следующим образом.
В исходном вертикальном положении исполнительных устройств 2 пружины 6 внутри корпусов 3 находится в среднем „ состоянии и выдвижные шганги А находятся также в среднем псножени /. Пои вращении кривошипа 10 понаода ьа из упругих звеньев 3 аждэй
пары увлекает за собой конец ведомого элемента 11 с жестко закрепленным на нем исполнительным устройством 2. Наматываемый конец гибкого элемента 7 постепенно сжимает пружину и втягивает штангу ч в корпус 3, а сматываемый конец освобождает штангу ч второго исполнительного устройства, которая под действием пружины выдвигается из корпуса 3,обеспечивая перемещение форсунок 5 вдоль обрабатываемой поверхности. При движении корпуса 3 в обратном направлении штанги перемещаются в обратном направлении.
С целью уменьшения динамики конструкции предлагаемого манипулятора одна из пар упругих звеньев соединяет концы кривошипа с ведомыми элементами перекрестно, что обеспечивает
встречные колебания (фиг„ 2).
Формула изобретения
1. Манипулятор, содержащий основание, привод, имеющий кривошип, шарнирно установленные на основании, исполнительные устройства, каждое из которых имеет корпус с направляющими, выдвижную штангу с рабочим органом, смонтированную в направляющих корпуса пружину, жестко закрепленную концами соответственно на корпусе и на выдвижной штанге, а также гибкий элемент один конец которого жестко закреплен на выдвижной штанге, отличающийся тем, что, с целью улучшения динамических и точностных характеристик за счет устранения зазоров в кинематической цепи, он снабжен упру51537ЫЗ6
гими звеньями, число которых вдвое 2. Манипулятор по п. 1, о т л и больше числа исполнительных устройств,чающийся тем, что кинематичесшарнирно закрепленными одними конца-Кая связь гибких элементов исполними на соответствующих кривошипах при-тельных устройств с основанием выполвода, при этом вторые концы упругих 5йена в виде барабанов, жестко устазвеньев кинематически связаны с корпу-новленных на основании, и на них заксами соответствующих исполнительныхреплены вторые концы гибких элементов,
устройств, а гибкие элементы этих ис-при этом корпусы исполнительных устполнительных устройств кинематически 1Qройств шарнирно установлены на осносвязаны с основанием.вании.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1987 |
|
SU1521588A1 |
| Манипулятор | 1988 |
|
SU1616811A1 |
| Мотовило к уборочным машинам | 1990 |
|
SU1802997A1 |
| ПРИВОД К ДВУХНОЖЕВОМУ РЕЖУЩЕМУ АППАРАТУ | 1991 |
|
RU2009631C1 |
| Стеклоочиститель транспортного средства | 1988 |
|
SU1569267A1 |
| Рычажная компенсирующая муфта | 1988 |
|
SU1532742A2 |
| МАНИПУЛЯТОР | 1991 |
|
RU2022784C1 |
| Стеклоочиститель транспортного средства | 1988 |
|
SU1569268A1 |
| Кисть манипулятора | 1989 |
|
SU1673439A1 |
| Манипулятор | 1989 |
|
SU1696303A1 |
Изобретение относится к строительному машиностроению и может быть использовано для механизации и автоматизации работ в строительстве. Цель изобретения - улучшение динамических и точностных характеристик за счет устранения зазоров в кинематической цепи. Манипулятор содержит основания 1 и исполнительные устройства 2. В исходном положении исполнительных устройств пружины 6 внутри их корпусов 3 находятся в среднем положении, и выдвижные штанги 4, установленные в направляющих корпусов, находятся также в среднем положении. При вращении кривошипов 10 привода упругие звенья, число которых вдвое больше числа исполнительных устройств, увлекают за собой исполнительные устройства, так как одни концы этих упругих звеньев шарнирно закреплены на кривошипах, а другие кинематически связаны с корпусами соответствующих исполнительных устройств. При этом гибкие элементы 7, одни концы которых закреплены на барабане 8, перемещают выдвижные штанги 4 с находящимися на них рабочими органами 5. С целью уменьшения колебаний одна из пар упругих звеньев соединяет концы кривошипов перекрестно, что обеспечивает встречное движение исполнительных устройств. 1 з.п. ф-лы, 1 ил.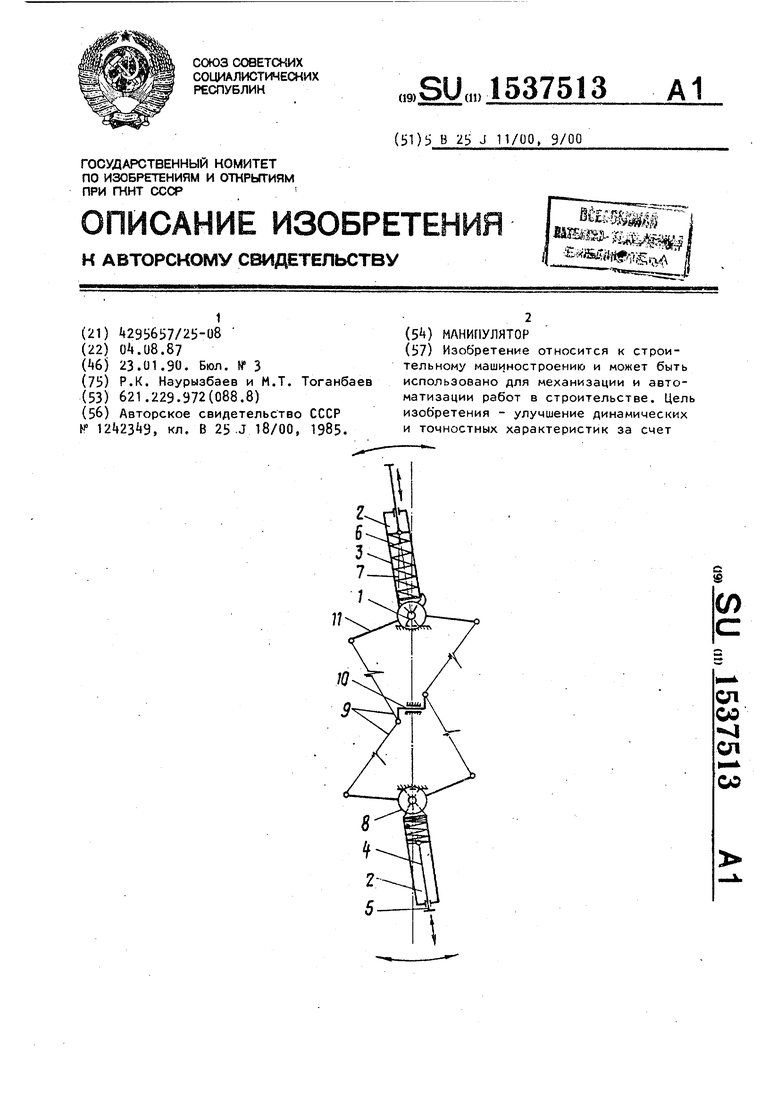
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| ( МАНИПУЛЯТОР | |||
