СП ГчЭ
СП
00 00
Изобретение относится к машиностроению, в частности к манипуляторам и агрегатам, и может быть использовано в строительстве для механизации и автоматизации работ.
Цель изобретения - улучшение динамических и точностных характеристик за счет устранения зазоров в кинематической цепи.
На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - схема работы упругих звеньев.
Манипулятор содержит основание 1 исполнительные устройства 2. Каждое устройство 2 манипулятора имеет корпус 3, внутри которого установлена выдвижная штанга 4, несушая рабочий орган, например форсунку 5. Штанга 4 поджата пружиной 6 к основанию корпуса 3. На конце штанги 4 закреплен гибкий элемент 7 {например трос), запасованный на барабан 8. Барабан 8 жестко закреплен на основании 1. Одни плечи двуплечих рычагов 9 соединяют упругие звенья 10 шарнирно с концами кривошипа 11, а другие плечи рычагов 9 соединены упругими звеньями 12 попарно непосредственно между собой. Каждый двуплечий рычаг 9 жестко закреплен с соответствующим корпусом 3 и шарнирно с основанием 1.
Манипулятор работает следующим образом.
В исходном положении исполнительные устройства 2 расположены взаимно перпендикулярно. Пружины 6 внутри корпусов находятся в среднем положении, штанги 4 выдвинуты в среднее положение. При повороте кривошипов И привода качания на 90° упругие звенья 10 увлекают за собой концы двуплечих рычагов 9 вместе с жестко закрепленными на них исполнительными устройствами 2, а гибкие звенья 12 тянут за собой противолежащие по диагонали другие концы рычагов 9 в- обратную сторону. Наматываемые концы гибкого элемента 7 постепенно сжимают пружины 6 и втягивают штанги 4 в корпуса 3 рук, а сматываемые концы освобождают штанги 4, которые под действием пружин 6 выдвигаются из корпусов 3 рук, обеспечивая перемещение форсунок 5 вдоль обрабатываемой поверхности. При следующем повороте еще на 90° происходит смещение исполнительных устройств 2 в другую сторону, сматываемые и наматываемые концы тросов 7 меняются, обеспечивая перемещение штанг 4 в противоположных направлениях. Заполный оборот кривошипов происходит четыре цикла колебания устройств 2.
10
Формула изобретения
1.Манипулятор, содержащий основание, привод,имеющий кривошипы, щарнирно установленные на основании, исполнительные
устройства, каждое из которых имеет корпус с направляющими, также щарнирно установленный на основании, выдвижную щтангу с рабочим органом, смонтированную в направляющих корпуса, пружину, жестко закрепленную своими концами соответственно на корпусе и на выдвижной щтанге, а также барабан и гибкий элемент, один конец которого жестко закреплен на выдвижной штанге, а другой - на этом барабане, отличающийся тем, что,
с целью улучшения динамических и точностных характеристик за счет устранения зазоров в кинематической цепи, он снабжен упругими звеньями и двуплечими рычагами, число которых равно числу исполнительных устройств, каждый из которых
шарнирно установлен на основании и жестко связан с корпусом соответствующего исполнительного устройства, причем одно плечо каждого двуплечего рычага кинематически связано с одним плечом другого рычага, а второе его плечо - с кривошипом
привода посредством упругих звеньев, при этом все барабаны жестко закреплены на основании.
2.Манипулятор по п. 1, отличающий- ся тем, что число исполнительных устройств равно четырем, а число кривошипов привода равно двум, причем эти кривошипы жестко соединены друг с другом и образуют между собой угол 90°, а упругие звенья установлены с предварительным
натяжением.
ГО
11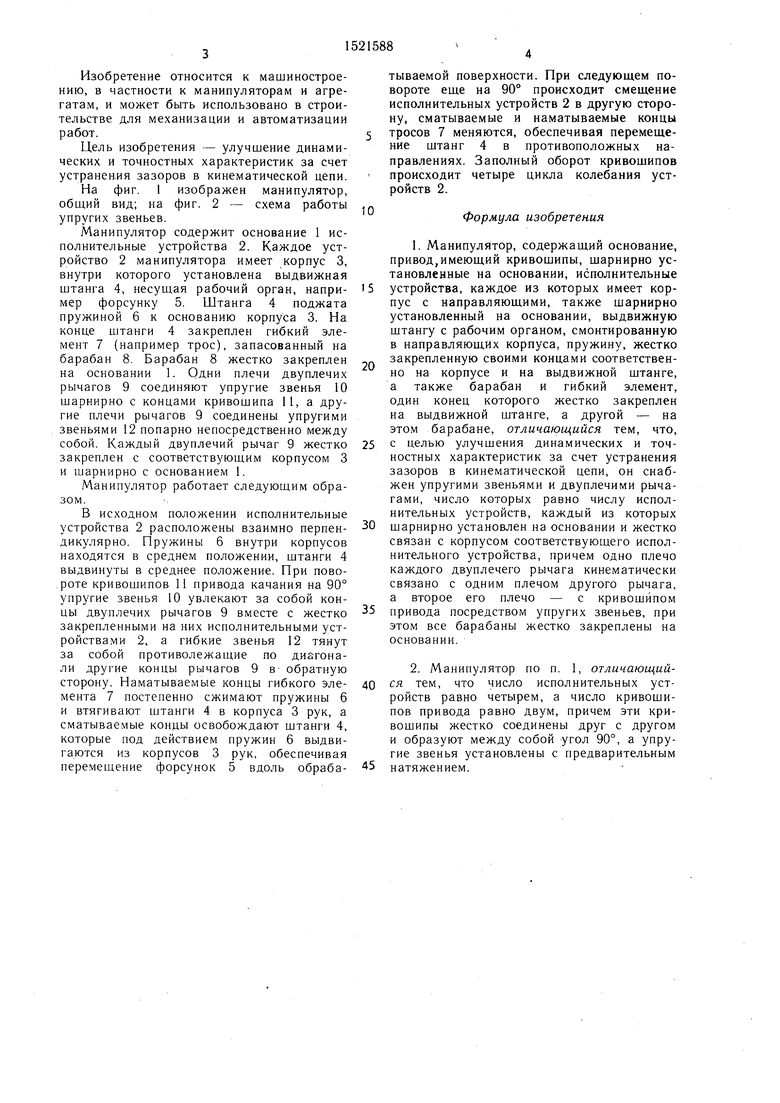
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1987 |
|
SU1537513A1 |
| Манипулятор | 1988 |
|
SU1616811A1 |
| Мотовило к уборочным машинам | 1990 |
|
SU1802997A1 |
| ПРИВОД К ДВУХНОЖЕВОМУ РЕЖУЩЕМУ АППАРАТУ | 1991 |
|
RU2009631C1 |
| Стеклоочиститель транспортного средства | 1988 |
|
SU1569267A1 |
| МАНИПУЛЯТОР | 1991 |
|
RU2022784C1 |
| Стеклоочиститель транспортного средства | 1988 |
|
SU1569268A1 |
| Рычажная компенсирующая муфта | 1988 |
|
SU1532742A2 |
| МАНИПУЛЯТОР | 1992 |
|
RU2022772C1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |

Изобретение относится к машиностроению и может быть использовано в строительстве для механизации и автоматизации работ. Цель изобретения - улучшение динамических и точностных характеристик за счет устранения зазоров в кинематической цепи. Исполнительные устройства 2, имеющие корпусы 3 и установленные в них выдвижные штанги 4, смонтированы шарнирно на основании 1. В исходном положении устройства 2 расположены взаимно перпендикулярно. При вращении кривошипов 11 от привода упругие звенья 10 увлекают за собой двуплечие рычаги 9, шарнирно установленные на основании и жестко связанные с корпусами 3 исполнительных устройств. Свободные плечи рычагов 9 кинематически связаны друг с другом посредством упругих звеньев 12, что приводит к перемещению исполнительных устройств. При этом наматываемые на барабаны 8, жестко закрепленные на основании, гибкие элементы 7 сжимают пружины 6, закрепленные концами соответственно на корпусах 3 и штангах 4. Сматываемые гибкие элементы освобождают пружины, под действием которых выдвижные штанги 4 выдвигаются из корпусов обеспечивая перемещение рабочих органов 5. За полный оборот кривошипов происходит, четыре цикла колебания исполнительных устройств 2. 1 з.п. ф-лы, 2 ил.
фиэ.г
| Манипулятор | 1985 |
|
SU1242349A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
