Изобретение относится к сельскохозяйственному машиностроению и может быть использовано для автоматического регулирования загрузки и стабилизации режимов рабочих органов зерноуборочных комбайнов.
Известен способ автоматического регулирования загрузки зерноуборочного комбайна, комбайн близкий к изобретению и заключающийся в том, что измеряют частоту вращения молотильного барабана комбайна, сравнивают измеренное значение с заданным и изменяют скорость комбайна в соответствии с полученным разностным сигналом рассогласования [1] .
Недостатком известного способа является низкая точность регулирования в условиях неравномерности рельефа убираемого поля.
Целью изобретения является повышение точности способа регулирования загрузки зерноуборочного комбайна за счет исключения влияния составляющей нагрузки на ходовую часть.
Это достигается тем, что предварительно в ручном режиме управления загрузкой одновременно измеряют частоту вращения молотильного барабана и коленчатого вала двигателя, определяют отношение этих величин и запоминают его, затем в режиме автоматического регулирования непрерывно измеряют частоту вращения молотильного барабана и вала двигателя, а отношение измеренных величин сравнивают с запомненным в ручном режиме, принимают это отношение за сигнал рассогласования и в зависимости от значения этого сигнала регулируют поступательную скорость комбайна.
Сущность заявляемого технического решения заключается в том, что измеряемый информационный параметр - отношение частоты вращения молотильного барабана к частоте вращения вала двигателя характеризует проскальзывание в ременном приводе. В то же время известно, что при постоянном передаточном отношении проскальзывание прямо пропорционально передаваемому крутящему моменту, поэтому оно в ременном приводе молотильного барабана однозначно характеризует его загрузку. Таким образом, заявляемая совокупность признаков обеспечивает получение сигнала, пропорционального только загрузке молотильного барабана и свободного от составляющей, обусловленной нагрузкой на ходовую часть комбайна.
На фиг. 1 приведена блок-схема устройства для осуществления способа; на фиг. 2 - блок-схема алгоритма работы устройства.
Устройство для осуществления способа состоит из датчика 1 частоты вращения молотильного барабана, датчика 2 частоты вращения коленчатого вала двигателя, блока 3 отношения, блока 4 памяти, блока 5 сравнения и блока 6 управления, с которого сигнал подается на исполнительный механизм (на чертеже не показан) управления скоростью комбайна. Выходы датчиков 1 частоты вращения молотильного барабана и датчика 2 частоты вращения двигателя комбайна соединены с входом блока 3 отношения, выход которого соединен с входом блока 4 памяти и входом блока 5 сравнения, второй вход которого соединен с выходом блока памяти. Выход блока сравнения соединен с блоком управления.
Работа по данному способу осуществляется следующим образом. В начале работы в ручном режиме регулирования загрузки зерноуборочного комбайна устанавливают номинальную загрузку и датчиками 1 и 2 одновременно измеряют частоты вращения молотильного барабана ωб и вала двигателя ωдв. В блоке 3 получают сигнал, пропорциональный отношению измеряемых величин i = ωб/ωдв . Это значение запоминается в блоке памяти 4 - iзап. Затем переключают устройство на автоматический режим регулирования загрузки и далее в процессе работы комбайна непрерывно измеряются частоты вращения молотильного барабана ωб и двигателя ωдвопределяется в блоке 3 текущее отношение измеряемых величин iтек = ωб/ωдв, которое в блоке 5 сравнивается с запомненным значением iзап и вырабатывается сигнал рассогласования Δ i = iтек - iзап. Сигнал рассогласования Δ i в блоке 6 управления преобразуется в команды на уменьшение или увеличение скорости комбайна.
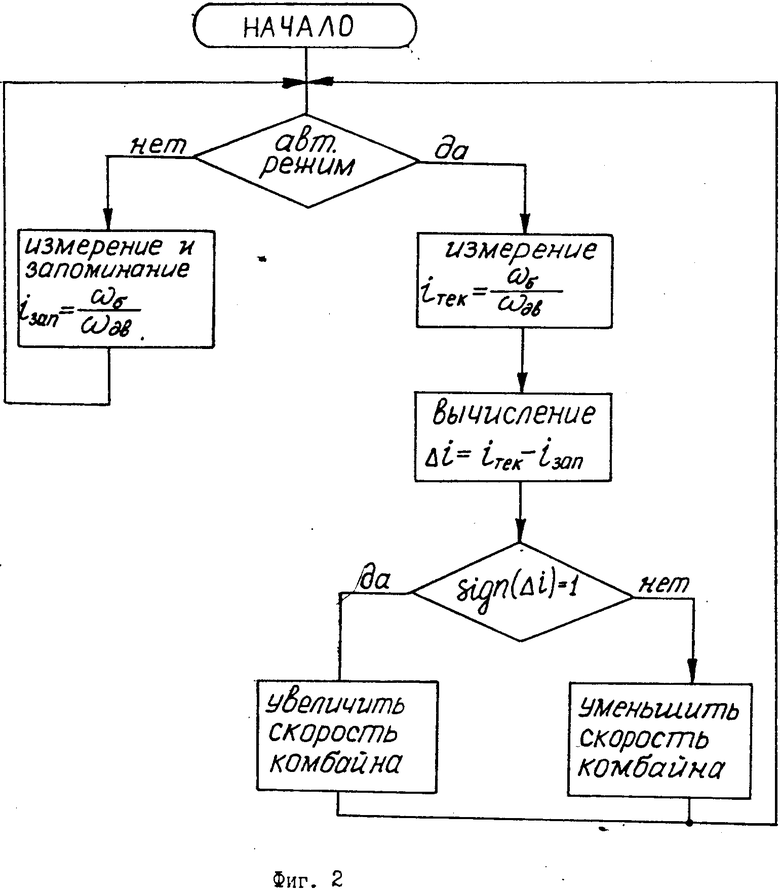
На фиг. 2 приведена блок-схема алгоритма работы устройства, который включает в себя следующие операции - анализ режима: ручной или автоматический. В случае ручного режима происходит измерение и запоминание iзап = ωб/ωдв . В случае автоматического режима регулирования загрузки происходят последовательные операции: измерения iтек = ωб/ωдв , вычисления Δ i = iтек - iзап, выбор воздействия на исполнительные органы sign (Δ i) = 1, затем следует переход на начало программы и цикл повторяется. После каждого выполнения операции выбора sig
n (Δi) = 1 в блоке управления вырабатывается сигнал на уменьшение или увеличение скорости комбайна. Если в процессе работы комбайна уменьшилась загрузка молотильного барабана, то проскальзывание в приводе барабана уменьшится и величина iтек также уменьшится. При этом Δ i = iтек - iзап станет отрицательной, что приведет к выработке блоком 6 управления команды на увеличение скорости движения комбайна, что увеличит загрузку барабана, и наоборот. Таким образом происходит стабилизация загрузки молотильного барабана. Работа блока 6 управления не отличается от аналогичного блока прототипа.
Устройство может быть реализовано на микропроцессорной системе, функционирующей в соответствии с алгоритмом (фиг. 2). В качестве датчиков частот вращения двигателя и молотильного барабана могут использоваться любые известные для этих целей датчики. Заявляемые техническое решение позволяет повысить точность регулирования за счет исключения влияния нагрузки на ходовую часть комбайна, которая является переменной случайной величиной при неравномерности рельефа поля. (56) Авторское свидетельство СССР N 745417, кл. А 01 D 41/12, 1980.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОЦЕНКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ РЕГУЛЯТОРА ТОПЛИВНОГО НАСОСА ДИЗЕЛЯ | 1991 |
|
RU2008639C1 |
| СПОСОБ УПРАВЛЕНИЯ ЗАГРУЗКОЙ ЗЕРНОУБОРОЧНОГО КОМБАЙНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2312485C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПОДАЧИ ХЛЕБНОЙ МАССЫ В ЗЕРНОУБОРОЧНЫЙ КОМБАЙН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2229208C1 |
| ДИСПЕРГАТОР | 1996 |
|
RU2139140C1 |
| КОМБИНИРОВАННЫЙ ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ | 1997 |
|
RU2143187C1 |
| УСТАНОВКА ДЛЯ РАЗМАТЫВАНИЯ РУЛОНОВ | 1991 |
|
RU2015647C1 |
| Система автоматического регулирования и контроля технологического процесса зерноуборочного комбайна | 1981 |
|
SU959682A1 |
| Устройство автоматического регулирования загрузки зерноуборочного комбайна | 1976 |
|
SU745417A1 |
| СПОСОБ НАГРЕВА ЖИДКОСТИ | 1996 |
|
RU2116583C1 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ ВАКУУМА СМЫКАНИЯ СОСКОВОЙ РЕЗИНЫ ДОИЛЬНЫХ СТАКАНОВ | 1993 |
|
RU2115305C1 |

Сущность: способ заключается в том, что предварительно в ручном регулировании загрузки измеряют частоту вращения молотильного барабана и частоту вращения вала двигателя. Определяют отношение измеренных величин и запоминают его. В автоматическом режиме регулирования загрузки непрерывно измеряют частоту вращения молотильного барабана и вала двигателя, а текущее отношение измеренных величин сравнивают с запомненным в ручном режиме работы и по разности между текущим значением и запомненным осуществляют управление поступательной скоростью движения комбайна. 2 ил.
СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ЗАГРУЗКИ ЗЕРНОУБОРОЧНОГО КОМБАЙНА , заключающийся в измеpении частоты вpащения молотильного баpабана, отличающийся тем, что, с целью повышения точности pегулиpования путем исключения влияния нагpузки на ходовую часть, в pучном pежиме pаботы измеpяют частоту вpащения вала двигателя, опpеделяют отношение частоты вpащения молотильного баpабана к частоте вpащения вала двигателя и запоминают его, пpи этом в автоматическом pежиме pаботы непpеpывно измеpяют частоту вpащения молотильного баpабана и вала двигателя, опpеделяют отношение измеpенных величин, сpавнивают его с запомненным в pучном pежиме pаботы, пpинимают это отношение за сигнал pассогласования и в зависимости от значения этого сигнала pегулиpуют поступательную скоpость комбайна.
