Изобретение относится к измерительной технике и может быть использовано в быстродействующих автоматизированных системах и комплексах для контроля параметров движения.
Целью изобретения является повышение быстродействия преобразования линейных перемещений в код за счет обеспечения асинхронного режима работы.
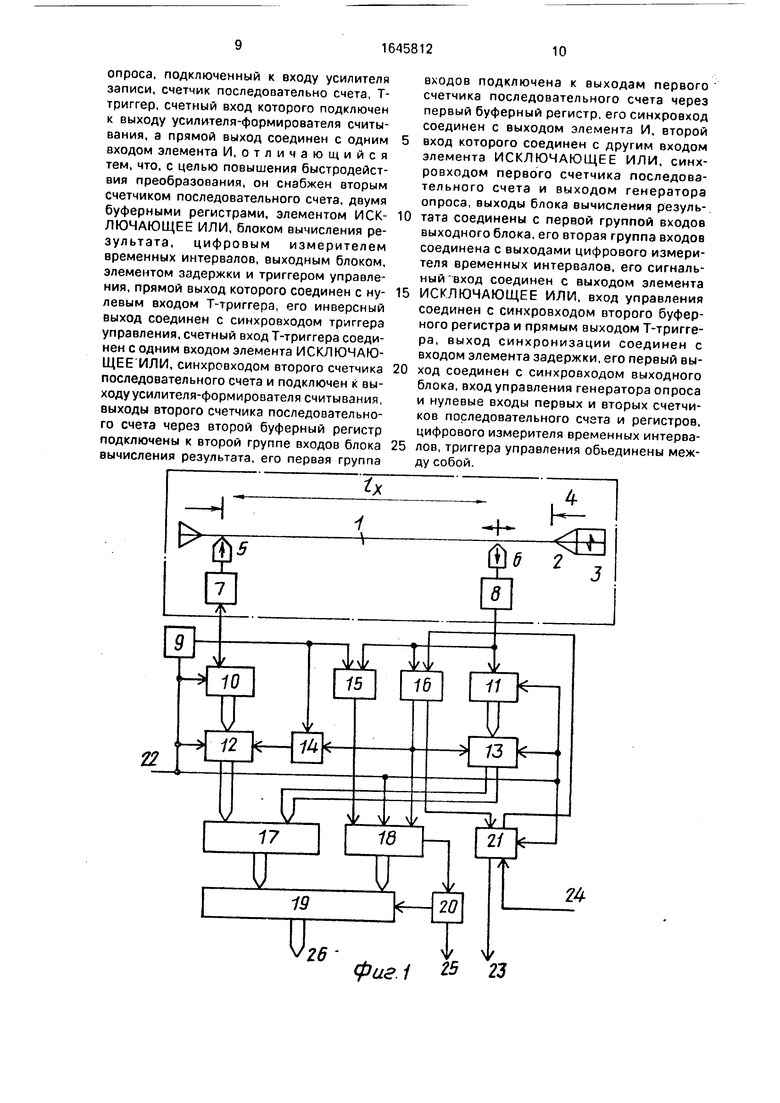
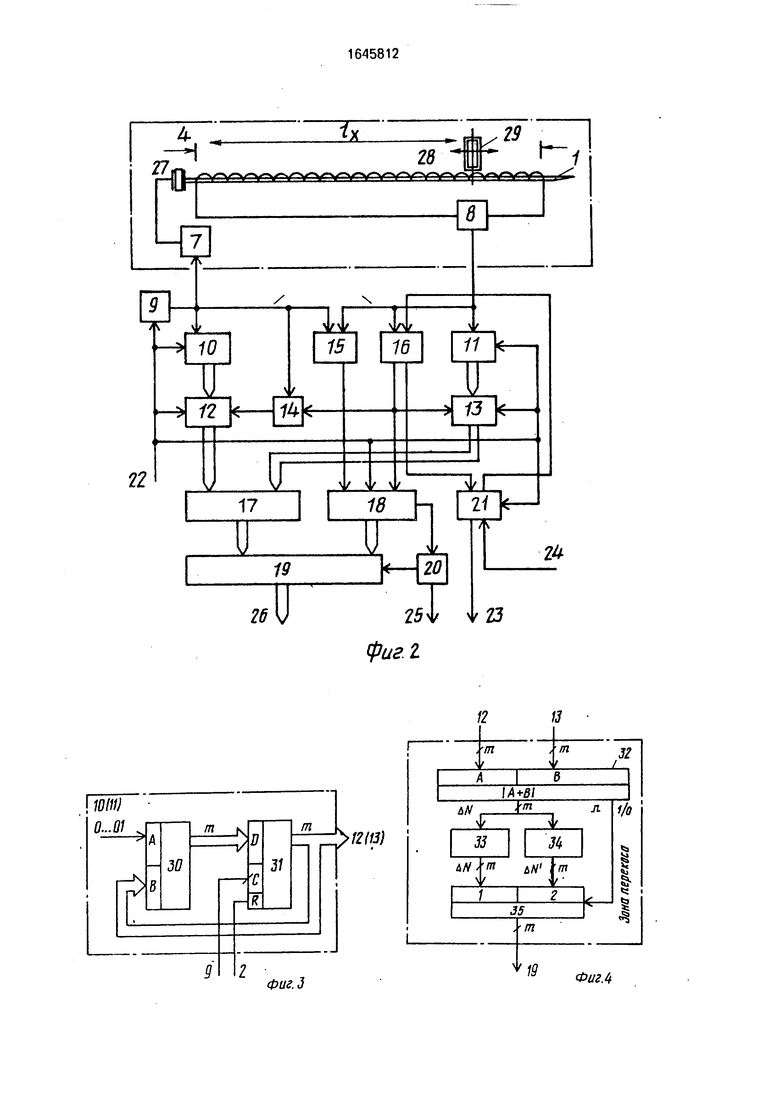
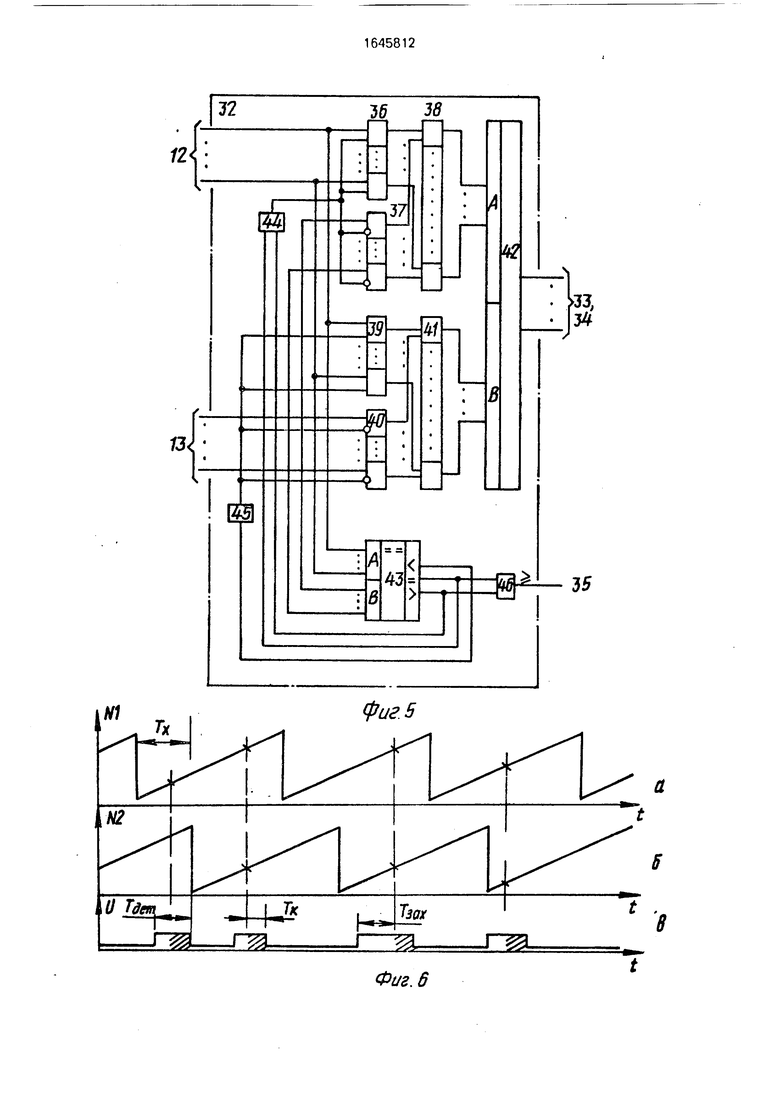
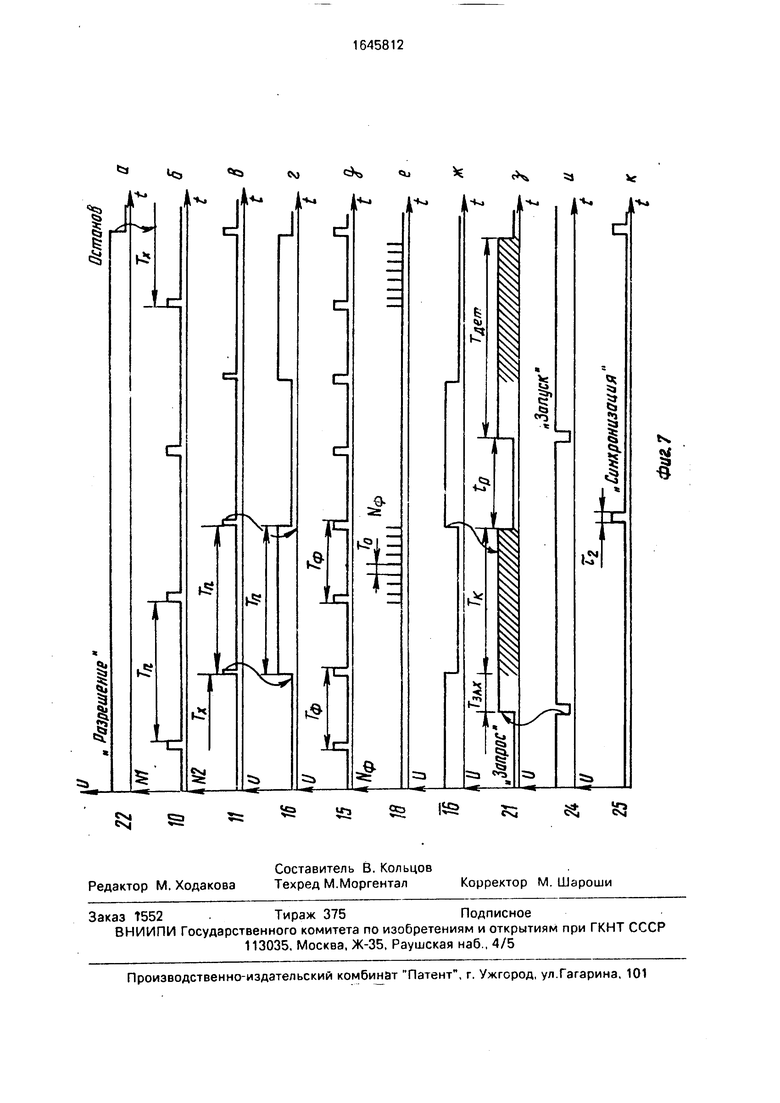
На фиг.1 и 2 приведены блок-схемы измерителя линейных перемещений, выполненного по условноконтактной и неконтактной кинематическим схемам; на фиг.3-5 - примеры выполнения основных его узлов; на фиг.6 и 7 - основные временные диаграммы, поясняющие работу измерителя линейных перемещений.
Ультразвуковой измеритель линейных перемещений содержит первичный маг- нитострикционный преобразователь перемещений (МПП), состоящий из прямолинейного звукопровода 1 из магни- тострикционного материала, двух составных акустических демпферов 2,
стабилизатора 3 растягивающих усилий, двух ограничителей 4 перемещений, сосредоточенных элемента 5 записи, элемента 6 считывания, усилителя 7 записи и усилителя-формирователя 8 считывания, генератор 9 опроса, первый и второй счетчики 10, 11 последовательного счета, буферные регистры 12,13, элемент 14 И, элемент 15 ИСКЛЮЧАЮЩЕЕ ИЛИ, Т-триггер 16, блок 17 вычисления результата (БВР), цифровой измеритель 18 временных интервалов (ЦИВИ), выходной блок(ВБ) 19, элемент20 задержки, триггер 21 управления, шину 22 управления, шину 23 запроса, шину 24 запуска, шину 25 синхронизации и п-шин 26 результата. Кроме того, первичный МПП измерителя содержит сигнальный пьезострик- ционный преобразователь 27 записи, распределенный элемент 28 считывания с подвижным элементом 29 подмагничива- ния.
Счетчики 10, 11 выполнены на основе комбинационного сумматора 30 и регистра 31 параллельного сдвига, включенных в
fe
О
ел
00
hO
кольцо, как показано на фиг.З. При этом сумматор 30 может быть выполнен на основе ПЗУ или РПЗУ, допускающих производить функциональное кодирование перемещения.
Блок 17 вычисления результата выполнен на основе схемы 32 суммирования по модулю, схемы 33 задержки сигналов, схемы 34 коррекции перекоса и цифрового коммутатора 35.
Схема 32 выполнена на основе двух групп логических ключей на элементах 36, 37 И. элементе 38 ИЛИ, элементах 39, 40 И, элементе 41 ИЛИ, комбинационного сумматора 42 и цифрового компаратора 43 с эле- ментами 44-46 ИЛИ.
Звукопровод 1 МПП установлен в акустические демпферы 2 и один его конец подключен к стабилизатору 3 растягивающих усилий. Около одного из демпферов неподвижно закреплен сосредоточенный элемент 5 записи с ограничителем 4 перемещений. Со стороны другого демпфера на звукопроводе закреплены второй ограничитель 4 перемещений и сосредоточенный элемент 6 считывания, выполненный с возможностью перемещения и кинематически соединенный с объектом контролируемого перемещения. Выводы элемента 5 записи и элемента б считывания подключены соот- ветствеино к выходу усилителя 7 записи и входу усилителя-формирователя 8 считывания. Выход генератора 9 опроса подключен к входу усилителя 7 записи и соединен с синхровходом первого счетчика 10 последо- вательного счета и одними входами элемента 14 И и элемента 15 ИСКЛЮЧАЮЩЕЕ ИЛИ. Выходы счетчика 10 соединены информационными гп-входами первого буферного регистра 12, его синхровход соединен с выходом элемента 14 И. Выход усилителя- формирователя 8 считывания подключен к синхровходу второго счетчика 11 последовательного счета, счетному входу Т-тригге- ра 16 и другому входу элемента 15 ИСКЛЮЧАЮЩЕЕ ИЛИ, выход которого соединен с информационным входом ЦИВИ 18. Выходы счетчика 11 соединены с информационными m-входами второго буферного регистра 13. Его синхровход соединен с другим входом элемента 14 И, управляющим входом ЦИВИ 18 и прямым выходом Т-триггера 16, инверсный выход которого соединен с синхровходом триггера 21 управления. Инверсный выход триггера 21 уп- равления подключен к шине 23 запроса, а прямой выход соединен с нулевым входом Т-триггера 16. Выходы первого и второго регистров 12 и 13 соединены соответственно с первой и второй группами информационных входов БВР 17, выходы которого соединены с первой группой из m-входов ВБ 19, а его вторая группа из n-входов соединена с выходами ЦИВИ 18. Его выход синхронизации через элемент 20 задержки подключен к шине 25 синхронизации, первый выход которой соединен с синхровходом ВБ 19, а его выходы подключены к п-и инам 26 результата. Единичный вход триггера 21 управления подключен к шине 24 запуска, а его нулевой вход соединен с нулевыми входами первых и вторых счетчиков 10, 11 и регистров 12, 13, ЦИВИ 18, управляющим входом генератора 9 опроса и подключен к шине 22 управления.
Кроме того, первичный МПП может быть выполнен на основе стержневого звукопро- вода 1 с монолитным акустическим демпфером, вдоль которого установлен распределенный элемент 28 считывания с подвижным элементом 29 подмагничива- ния, перемещающимся вдоль звукопровода между ограничителями 4 перемещений, подключенный кинематически к объекту контролируемого перемещения. На противоположной стороне от акустического демпфера на торцовой части звукопровода закреплен пьезострикционный преобразователь 27 записи (возбуждения), подключенный к выходу усилителя 7 записи. Вьюоды распределенного элемента 28 считывания соединены с входами усилителя-формирователя 8 считывания.
Измеритель работает следующим образом.
В исходном состоянии измеритель находится в режиме останова и не реагирует на цифровые импульсные сигналы Запуск по шине 24 запуска (фиг.1). Первый и второй счетчики 10, 11 последовательного счета и буферные регистры 12, 13 обнулены. При подаче цифрового сигнала Разрешение (фиг.7,а) по шине 22 управления измеритель переводится в режим работы. Производится запуск цифрового генератора 9 опроса, вырабатывающего последовательность прямоугольных видеоимпульсов с частотой следования fn 1 /Тп (фиг,7,б) и разблокирование входов счетчиков 10, 11. регистров 12, 13, ЦИВИ 18, триггера 21 управления.
Последовательность импульсов генератора 9 опроса проходит одновременно на синхровход первого счетчика 10 последовательного счета, формируя на его т-разряд- ном выходе код N1 текущего значения (фиг.6,а, 7,6), входы элемента 14 И и элемента 15 ИСКЛЮЧАЮЩЕЕ ИЛИ, вход сигнального усилителя 7 записи первичного МПП.
На выходе усилителя 7 записи формируются токовые сигналы, которые проходят на
вход сосредоточенного элемента 5 записи и возбуждают под ним в звукопроеоде 1 продольные магнитоупругие волны.
Возбужденные магнитоупругие волны начинают распространяться в обе стороны по звукопроводу с фазовой скоростью V и в следующий момент времени достигают левый (фиг.1) акустический демпфер 2 и полностью рассеивают свою энергию.
Распространяясь вправо (фиг.1) по звукопроводу 1. магнитоупругие волны через искомое время Тх Ix/V, где х - искомое линейное перемещение, достигают подвижный сосредоточенный элемент б считывания и наводят на его выходе импульсы напряжения считывания, которые усиливаются и преобразуются в прямоугольные ви- деоимпульсы считывания (фиг.7,в) усилителем-формирователем 8 считывания МПП. В следующий момент времени магнитоупругие волны достигают правый акустический демпфер 2 и рассеивают на нем свою энергию. Таким образом устраняется образование в звукопроводе отраженных или инверсных магнитоупругих волн.
С выхода усилителя-формирователя 8 считывания сигналы проходят на синхров- ход второго счетчика 11 последовательного счета, формируя на его m-разрядном выходе код N2 текущего значения (фиг.6,б; 7,в), счетный вход Т-григгера 16 и другой вход элемента 15 ИСКЛЮЧАЮЩЕЕ ИЛИ. Счет ный вход Т-триггера в этот момент заблокирован сигналом триггера 21 управления (фиг.7,з) и не воспринимает управляющие сигналы. На выходе элемента 15 ИСКЛЮЧАЮЩЕЕ ИЛИ формируются цифровые им- . пульсные сигналы фазы Tcj, (фиг.7,б,в,д) механотронной шкалы (фиг.6,а,б), которые проходят на сигнальный вход ЦИВИ 18, но запуск его не производят, так как разрешающий его работу сигнал не сформирован на прямом выходе Т-триггера (фиг.7,г). Логический элемент 14 И также закрыт сигналом Т-триггера 16.
Следовательно, на счетный вход первого счетчика 10 будут поступать импульсы цифровой мерной шкалы (фиг 7,6), а на счетный вход второго счетчика 11 - импульсы магнитострикционной мерной шкалы (фиг.7,в), образующие в совокупности меха- нотронную шкалу грубого отсчета, кодовое значение которой несет информацию и величине искомого линейного перемещения Тх, выраженную через соответствующие коды N1. N2 (фиг.б,а,б).
При подаче цифрового импульсного сигнала Запуск (фиг.7,и) по шине 24 запуска производится переключение в единичное состояние триггера 21 управления. Это приводит к снятию по шине 23 запроса цифрового сигнала Запрос (фиг.7,з) и разблокированию Т-триггера. По первому же сигнэпу усилителя-формирователя 8 считывания
(фиг.7,в) производится переключение в единичное состояние Т-триггера 16, что приведет к разблокированию логического элемента 14 И, записи кода N2 текущего значения во второй буферный регистр 13,
разблокированию и запуску ЦИВИ 18 (фиг.7.г,е).
В следующий момент времени по первому импульсу генератора 9 опроса (фиг.7,6) через открытый элемент 14 И производится
запись кода N1 текущего значения в первый буферный регистр 12.
Следующий импульс усилителя-формирователя 8 считывания (фиг.7,в) переключает Т-триггер 16 в исходное (нулевое)
состояние (фиг.7,г). Производится блокирование входов логического элемента 14 И, ЦИВИ 18 и одновременно переключение триггера 21 управления в исходное состояние (фиг.7,з). Это приводит к блокированию
счетного входа Т-триггера 16 и выставлению по шине 23 сигнала Запрос.
С выходов буферных регистров 12, 13 сформированные коды N1. N2 грубого отсчета поступают на информационные входы
ВВР 17, где производится вычисление разностного кода AN IN1-N2J искомого линейного перемещения. Схема 32 позволяет формировать код перемещения AN IN1+N2I, где N2 - инверсноезначение кода N0 по выходам регистра 13, на основе операции логического сложения, что почти в 2 раза повышает производительность схемы. На выходе элемента 46 ИЛИ формируется сигнал (1 /0) знака перекоса.
Перекос или двузначность кодирования
интервала Тх перемещения возникает на границах смены циклических кодов N1 или N2 (фиг.6,а,б) (1......00) при асинхронном считывании информации (фиг.6, в), которы и дает возможность повысить быстродействие измерения. Для устранения дп/значности кодирования в блоке 17 использованы две m-разрядные схемы 33 и 34. Схема 33 является пассивной и выполнена на цифровых элементах задеркки сигнала для временного согласования со схемой 34. которая выполнена на основе ПЗУ ( ПЗУ) с симметричной таблицей кодирования. Симметричное кодирование с осью
симметрии т/2 позволяет устранить ука- ьлгкчй перекос кодирования.
Прямой и преобразованный коды AN, Л П с выходов схем 33, 34 поступают на и-иальные входы коммутатора 35 и в зависимости от знака перекоса выдаются на выходы БВР 17.
Вычисленный код AN линейного перемещения грубого отсчета поступает на первую группу сигнальных входов выходного блока 19, выполненного на основе комбинационного сумматора и буферного регистра. На вторую группу его входов поступает п- разрядный код фазы Ыф Тфт0, где f0 - частота дискретизации интервала Тф, сформированной ЦИВИ 18 (фиг.7,е) по точной шкале отсчета. В блоке 19 производится формирование результирующего кода искомого перемещения Nx Д N + Мф, считанного по точной и грубой механотронной мерной шкале, что позволяет получить точность измерения не хуже rj ±0,5 То с учетом дисперсионных свойств материала звукопровода.
В следующий момент времени riЈ- ri; + П8 + rig, где riy.rie, rig - время задержки сигналов через цепи блоков 17, 18, 19, по сигналу цикл ЦИВИ 18 будет записан код NX в выходной буферный регистр выходного блока 19, где будет храниться до следующего цикла преобразования. Через время Т2 ri + Хзап, где Тзап - время записи информации в регистр, по шине 25 синхронизации будет выставлен цифровой импульсный сигнал Синхронизация (фиг.7,к).
На этом цикл преобразования заканчивается, по п-шинам 26 выставляется цифровой сигнал Код перемещения, и измеритель подготовлен к очередному циклу преобразования,который начинается через время tp реакции пользователя и выполняется без изменения согласно рассмотренному. Асинхронный режим работы измерителя может быть изменен на синхронный при объединении шин 23 и 25. Работа измерителя принудительно блокируется при снятии сигнала Разрешение по шине 22 управления.
Для обеспечения жесткости и стабильности волнового сопротивления звукопровода первичного МПП (фиг.1), который выполнен в виде проволоки (ленты), он подвергнут продольному стабилизированному .напряжению через стабилизатор 3 растягивающих усилий вы заданных пределах для получения максимальной величины отношения сигнал/помеха и минимального провиса. Кроме того, жесткость звукопровода МПП может быть значительно повышена при использовании стержневого или трубочного материала. В этом случае кинематическую схему МПП можно выполнить по неконтактной схеме, используя пъезострик- ционный входной преобразователь 27, устанавливаемый на торцовой части, и распределенный элемент 28 считывания с подвижным элементом 29 подмагничивания, образующие выходной распределенный
магнитострикционный преобразователь (РМП), как показано на фиг.2,.Акустический демпфер в этом случае может быть выполнен монолитным с образующей угла а 3-30°, что обеспечивает высокие демпфирующие
0 свойства падающих магнитоупругих волн. Ограничители 4 перемещений предохраняют от возможного разрушения подвижные элементы кинематической схемы МПП в крайних точках диапазона перемещения.
5 Принцип работы измерителя на фиг.2 не отличается от измерителя, изображенного на фиг. 1, для которых функция преобразования может быть записана следующим выражением:
0Z TXV(IN1-N2I ).
Повышение быстродействия преобразования с сохранением заданной точности измерения устройства относительно прототипа достигается за счет рэзбиения всего
5 диапазона перемещения Тх на ряд подин- тервалов равной длительности Тп на основа- нии частотно-временного метода паритетных шкал из условия k
0т - L Тп.
i 1
где k - число подинтервалов, выбираемое из условия граничной частоты возбужения МПП и требуемого времени преобразова- с нияв диапазоне
Тк Тц (Тзах + Тк),
где Тк - время кодирования интервала перемещения Тх; Тзах - время захвата фазы механотронной шкалы, что приблизительно в
0 (Тх/Тк + 1) раз меньше относительно прототипа. Стабилизация и программирование параметра Тц в известном временном диапазоне позволяет использовать измеритель в скоростных ротоботехнических системах
5 измерения, контроля и управления параметров движения обьекта.
Формула изобретения Ультразвуковой измеритель линейных перемещений, содержащий первичный маг0 нитострикционный преобразователь перемещений, состоящий тлз прямолинейного звукопровода из магнитострикционного материала, заключенного в акустический демпфер, элемента записи, соединенного с
е ним усилителя записи и элемента считывания, выполненного подвижным, имеющего кинематическое соединение с объектом контролируемого перемещения, и подключенного к элементу считывания усилителя- формирователя считывания, генератор
опроса, подключенный к входу усилителя записи, счетчик последовательно счета, Т- триггер, счетный вход которого подключен к выходу усилителя-формирователя считывания, а прямой выход соединен с одним входом элемента И, отличающийся тем, что, с целью повышения быстродействия преобразования, он снабжен вторым счетчиком последовательного счета, двумя буферными регистрами, элементом ИСК- ЛЮЧАЮЩЕЕ ИЛИ, блоком вычисления результата, цифровым измерителем временных интервалов, выходным блоком, элементом задержки и триггером управления, прямой выход которого соединен с ну- левым входом Т-триггера, его инверсный выход соединен с синхровходом триггера управления, счетный вход Т-триггера соединен с одним входом элемента ИСКЛЮЧАЮ- ЩЕЕ ИЛИ, синхровходом второго счетчика последовательного счета и подключен к выходу усилителя-формирователя считывания, выходы второго счетчика последовательного счета через второй буферный регистр подключены к второй группе входов блока вычисления результата, его первая группа
входов подключена к выходам первого счетчика последовательного счета через первый буферный регистр, его синхровход соединен с выходом элемента И. второй вход которого соединен с другим входом элемента ИСКЛЮЧАЮЩЕЕ ИЛИ. синхровходом первого счетчика последовательного счета и выходом генератора опроса, выходы блока вычисления результата соединены с первой группой входов выходного блока, его вторая группа входов соединена с выходами цифрового измерителя временных интервалов, его сигнальный вход соединен с выходом элемента ИСКЛЮЧАЮЩЕЕ ИЛИ. вход управления соединен с синхровходом второго буферного регистра и прямым выходом Т-триггера, выход синхронизации соединен с входом элемента задержки, его первый выход соединен с синхровходом выходного блока, вход управления генератора опроса и нулевые входы первых и вторых счетчиков последовательного счэта и регистров, цифрового измерителя временных интервалов, триггера управления объединены между собой.
Изобретение относится к измерительной технике и может быть использовано в быстродействующих автоматизированных системах и комплексах для контроля параметров движения. Цель изобретения - повышение быстродействия измерительных перемещений за счет обеспечения асинхронного режима работы. При измерении линейных перемещений весь диапазон перемещений разбивают на ряд подинтер- валов равной длительности на основании частотно-временного метода паритетных шкал. 7 ил.
фиг. 1 25 23
фиг. I
12
13
ом
5 ю
. SS
vr
KS
$
в
| Устройство для измерения перемещений | 1983 |
|
SU1158865A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Магнитострикционный дифференциальный преобразователь перемещений | 1978 |
|
SU747812A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
