Изобретение относится к робототехнике, а более конкретно к способам задания местоположения (т.е. положения центральной точки и ориентации) рабочего органа манипулятора.
Известен способ программирования местоположений манипулятора с использованием специального копирующего манипулятора (Накано Э. Введение в робототехнику, М. Мир, 1988, с.19-21).
Такой способ отличается сложностью, требует дорогостоящих технических средств и не позволяет автоматически воспроизводить программу произвольное требуемое количество раз.
Наиболее близким по технической сущности к изобретению является способ программирования манипулятора обучением. При этом манипулятор, имеющий датчики значений обобщенных координат (в качестве которых могут использоваться, например, присоединенные углы звеньев), выводит рабочий орган в программируемое местоположение и производит запоминание значений обобщенных координат. Запрограммированное местоположение может переводиться из обобщенных координат в декартовые в базовой системе координат и обратно путем решения прямой и обратной кинематических задач манипулятора.
Известный способ применяется для программирования манипуляторов с постоянными параметрами звеньев. В то же время при программировании реконфигурируемых манипуляторов (с переменными параметрами звеньев) известный способ имеет низкую точность и надежность задания местоположений, так как при изменении параметров реконфигурируемого звена обобщенные координаты всех местоположений рабочего органа изменяются.
Целью изобретения является повышение точности и надежности программирования и управления реконфигурируемыми манипуляторами.
Это достигается тем, что в рабочей зоне манипулятора неподвижно закрепляют относительно основания фиксирующий элемент, выполненный таким образом, что возможен только один вариант местоположения рабочего органа при фиксации относительно фиксирующего элемента, а перед выведением или после выведения рабочего органа в программируемое местоположение его при фиксированных параметрах реконфигурируемого звена выводят в местоположение фиксации относительно фиксирующего элемента, фиксируют относительно фиксирующего элемента, измеряют и запоминают значения обобщенных координат при данном местоположении рабочего органа и конфигурации реконфигурируемого звена.
Сущность изобретения заключается в том, что запоминание программируемого местоположения в виде двух наборов обобщенных координат, один из которых соответствует программируемому местоположению, а другой заранее заданному фиксированному местоположению в пространстве, позволяет точно и надежно осуществлять программирование и последующую отработку программ при любых изменениях параметров реконфигурируемого звена, так как при изменении параметров реконфигурируемого звена соответствующим образом изменяются также обобщенные координаты манипулятора при фиксации рабочего органа относительно фиксирующего элемента. Таким образом, вводимое дополнительное измерение обобщенных координат позволяет при необходимости воспроизвести требуемую форму реконфигурируемого звена.
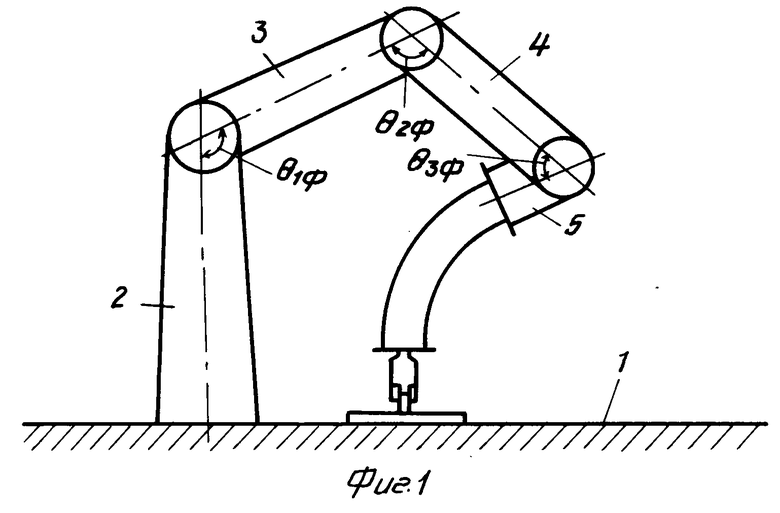
На фиг.1 в качестве примера показан реконфигурируемый манипулятор и обобщенные координаты звеньев в момент фиксации рабочего органа относительно фиксирующего элемента; на фиг.2 манипулятор с той же конфигурацией реконфигурируемого звена в момент запоминания обобщенных координат программируемого местоположения.
Реконфигурируемый манипулятор, например, может содержать основание 1, кинематически связанные жесткие звенья 2,3,4 и реконфигурируемое звено 5. Последнее способное изменять, а при необходимости фиксировать свои геометрические параметры, может быть выполнено, например, на базе эластичной оболочки, соединяющей начальный и конечный фланцы реконфигурируемого звена и заполненной электрореологической жидкостью. Для фиксации формы реконфигурируемого звена внутри оболочки могут располагаться сетчатые электроды, соединенные через управляeмые коммутирующие элементы с источником напряжения. На конечном фланце манипулятора установлен рабочий орган 6. Фиксирующий элемент 7 закреплен на основании 1 манипулятора, он может быть выполнен, например, в виде толстой металлической пластины, в которой выполнены пазы по форме губок схвата (что обеспечивает однозначность местоположения схвата при захвате фиксирующего элемента).
Способ осуществляется следующим образом.
Манипулятор, например, при помощи пульта обучения, выводят в положение, при котором рабочий орган (схват) оказывается в местоположении фиксации относительно фиксирующего элемента. Далее схват фиксируют в этом местоположении (например, путем захватывания фиксирующего элемента), измеряют и запоминают значения обобщенных координат θ1ф, θ2ф и θ3ф при таком местоположении и конфигурации реконфигурируемого звена (фиг.1).
Далее, не изменяя параметров реконфигурируемого звена, рабочий орган выводят в программируемое местоположение, измеряют и запоминают значения обобщенных координат θ1п, θ2п, θ3п (фиг.2). На этом программирование данного местоположения заканчивается, а данные о программируемом местоположении в виде двух наборов обобщенных координат заносятся в запоминающее устройство блока управления.
Аналогично осуществляется программирование и других местоположений. Если несколько программируемых местоположений достижимы при одних и тех же параметрах реконфигурируемого звена, то в проведении реконфигурации (изменения параметров реконфигурируемого звена) перед программированием каждого из этих нескольких местоположений нет необходимости и фиксацию рабочего органа относительно фиксирующего элемента с запоминанием обобщенных координат можно провести только один раз для всех этих местоположений.
При отработке программы для выхода в запрограммированное местоположение сначала проводят реконфигурацию реконфигурируемого звена, после которой начальный и конечный фланцы реконфигурируемого звена займут такое же относительное положение, как в момент программирования. Для этого осуществляют фиксацию (например, путем захватывания) рабочего органа относительно фиксирующего элемента, далее осуществляют расфиксацию реконфигурируемого звена (т. е. взаимного положения начального и конечного фланцев реконфигурируемого звена) и дают команду приводам на отработку обобщенных координат θ1ф, θ 2ф, θ 3ф. Таким образом фиксирующий элемент может одновременно выполнять функции упорного реконфигурирующего элемента. После реконфигурации фиксируется взаимное положение начального и конечного фланцев реконфигурируемого звена, осуществляется расфиксация (схват разжимается) рабочего органа 6 относительно фиксирующего элемента 7 и дается команда приводам звеньев манипулятора на отработку обобщенных координат θ1п, θ2п, θ3п, в результате чего рабочий орган перемещается в требуемое запрограммированное местоположение.
Если положение фиксирующего элемента в базовой декартовой системе координат известно, а в системе управления имеются свободные вычислительные ресурсы, то по значениям θ1ф, θ2ф, θ 3ф после решения прямой кинематической задачи можно при необходимости найти относительное положение начального и конечного фланцев реконфигурируемого звена, а далее по значениям θ1п, θ 2п, θ 3п после повторного решения прямой кинематической задачи можно найти координаты запрограммированного местоположения в базовой декартовой системе координат.
Заявляемый способ по сравнению с известным обеспечивает точное и надежное программирование местоположений рабочего органа даже при изменении параметров реконфигурируемого звена, обеспечивает точную работу манипулятора даже при самых простых алгоритмах управления, позволяет оценить геометрические параметры реконфигурируемого звена и определить координаты всех местоположений в базовой декартовой системе координат.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОВЫШЕНИЯ ДОЛГОВЕЧНОСТИ ДЕТАЛЕЙ ПОДВИЖНЫХ СОЕДИНЕНИЙ МЕХАНИЗМОВ МАШИН | 1992 |
|
RU2107902C1 |
| АДАПТИВНЫЙ СХВАТ МАНИПУЛЯТОРА | 1991 |
|
RU2021099C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРОМЕХАНИЧЕСКИМ ПРИВОДОМ | 1991 |
|
RU2011910C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРИВОДОМ ПОСТУПАТЕЛЬНЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2106950C1 |
| ДВУХСКОРОСТНОЙ МЕХАНИЗМ ПРИВОДА ЗАДНЕГО ВАЛА ОТБОРА МОЩНОСТИ УНИВЕРСАЛЬНО-ПРОПАШНОГО ТРАКТОРА | 1991 |
|
RU2025306C1 |
| ТЯГОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1991 |
|
RU2011559C1 |
| УСТРОЙСТВО ЗАЩИТЫ ЭЛЕКТРОПРИВОДА ПЕРЕМЕННОГО ТОКА | 1991 |
|
RU2012972C1 |
| УСТРОЙСТВО ЗАЩИТЫ ЭЛЕКТРОПРИВОДА ПЕРЕМЕННОГО ТОКА | 1991 |
|
RU2012973C1 |
| СПИРАЛЬНОЕ СВЕРЛО | 1988 |
|
RU2035270C1 |
| ЭЛЕМЕНТ ПАМЯТИ | 1988 |
|
RU2075786C1 |
Использование: машиностроение, при определении местоположения рабочего органа манипулятора. Сущность изобретения: манипулятор выводят в положение, при котором схват 6 оказывается в положении фиксации относительно фиксирующего элемента 7. Схват захватывает фиксирующий элемент, тем самым фиксируясь относительно последнего. Далее измеряют и запоминают значения обобщенных координат манипулятора при данном положении схвата и конфигурации реконфигурируемого звена 5. Далее, не изменяя параметры реконфигурируемого звена, рабочий орган 6 выводят в программируемое местоположение и измеряют и запоминают значения обобщенных координат. Таким образом, каждое программируемое местоположение представляется в виде двух наборов обобщенных координат. 2 ил.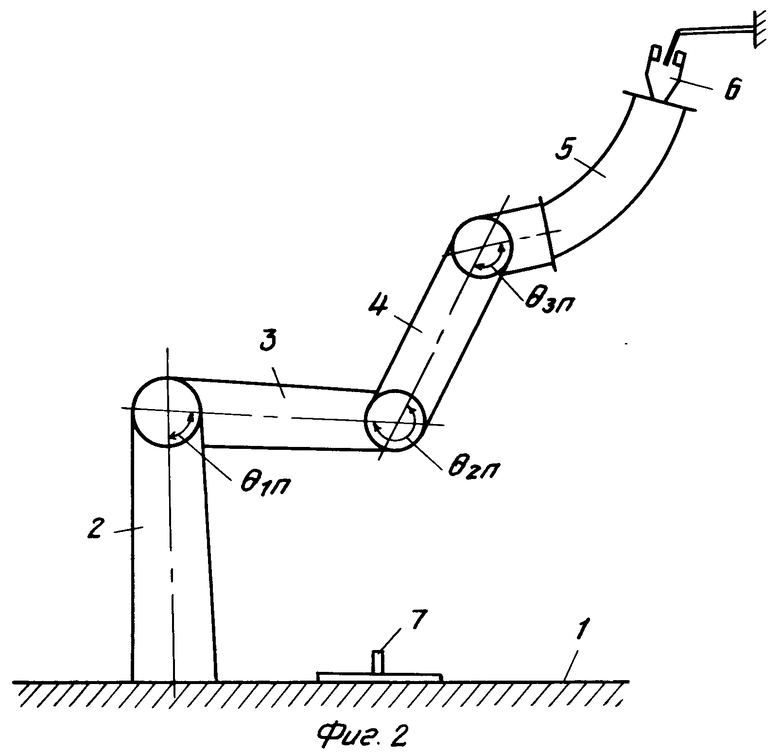
СПОСОБ ПРОГРАММИРОВАНИЯ РЕКОНФИГУРИРУЕМОГО МАНИПУЛЯТОРА, включающий выведение рабочего органа в программируемое местоположение, измерение и запоминание значений его обобщенных координат, отличающийся тем, что перед выведением или после выведения рабочего органа в программируемое местоположение при фиксированных параметрах реконфигурируемого звена рабочий орган жестко фиксируется на фиксирующем элементе, расположенном в рабочей зоне манипулятора, а затем измеряют и запоминают значение обобщенных координат при данном его местоположении.
| Фу К | |||
| и др | |||
| Робототехника, М.: Мир, 1989, с | |||
| Прибор для автоматического контроля скорости поездов | 1923 |
|
SU486A1 |
