Изобретение относится к машиностроению, в частности к способам управления приводом машины.
Известен способ управления приводом поступательных перемещений, при котором регулируют напряжение, подаваемое на приводной двигатель, с использованием закона перемещения в функции пути узла, связанного с приводной шестерней [1].
Недостатком этого способа является то, что не обеспечивает стабильности энергетических характеристик привода, не позволяет учитывать изменения соотношения сил движущих привода и реакций в направляющих (включающих силы трения) и не учитывает возможные законы изменения скорости при разгоне и торможении. Другими словами, известный способ реализует обратную связь по положению: линейному ползуну, преобразованному в угловое сельсина обратной связи. Этот способ "не реагирует" на силовые, скоростные и энергетические характеристики привода. Необходимость управления движения узлов станков с учетом меняющихся сил (реактивных и движущих) и скоростей очевидна. Однако функциональная и количественная связь между этими параметрами проявляется не однозначно и требует более детального рассмотрения. Эта детализация связана не только с необходимостью установки функциональной и количественной связи между силами движущими, реактивными и инерционными (учитывающими закон изменения скорости). Для металлообрабатывающих станков и другого технологического оборудования в большей степени важно учитывать изменение состояния трущихся поверхностей, случайные факторы, оказывающие влияние на изменение соотношения сил резания, перекосы в направляющих и пр. Каждому типу направляющих (T-образных, V-образных и пр.) и габаритам перемещающихся узлов соответствуют определенные соотношения приводных сил и мощностей, обусловленных законами изменения скорости. Однако эти параметры не остаются постоянными. Они изменяются в связи с перераспределением давлений в зонах контакта, вызванными как неравномерностью износа направляющих, так и перекосами. Таким образом, напрашивается необходимость управления силовыми или геометрическими параметрами, которое позволило бы учитывать как геометрию и типоразмер направляющих, так и возможные вышеперечисленные характеристики нестабильности (непостоянства) силовых и энергетических характеристик. Известные способы управления приводами такого подхода не реализуют.
Изобретение направлено на расширение эксплуатационных возможностей за счет регулирования скорости вращения приводной шестерни.
Поставленная задача решается тем, что в способе управления приводом поступательных перемещений, при котором регулируют напряжение, подаваемое на приводной двигатель, с использованием закона перемещения в функции пути узла, регулирование напряжения осуществляют посредством электрических сигналов, пропорциональных величинам, которые определяют по следующим зависимостям: ,
,
где
Δω и ω
ωш - закон изменения скорости вращения приводной шестерни, который получают исходя из равномерного распределения давлений на рабочих поверхностях перемещаемого узла ,
,
V(S) - закон изменения скорости перемещения узла в функции пути;
rш - делительный радиус шестерни;
ω ,
,
Q
iдш - передаточное отношение между двигателем и приводной шестерней;
Mн - номинальный момент двигателя;
K = Mн/(ωc-ωн) - крутизна механической характеристики двигателя;
ωн,ωc - номинальная и синхронная скорости вращения двигателя;
ω
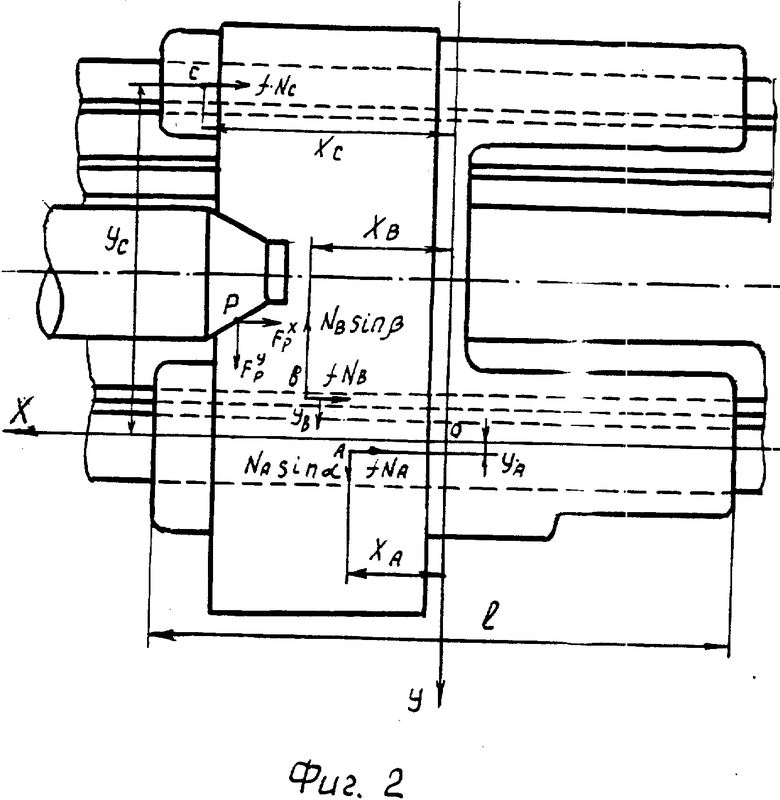
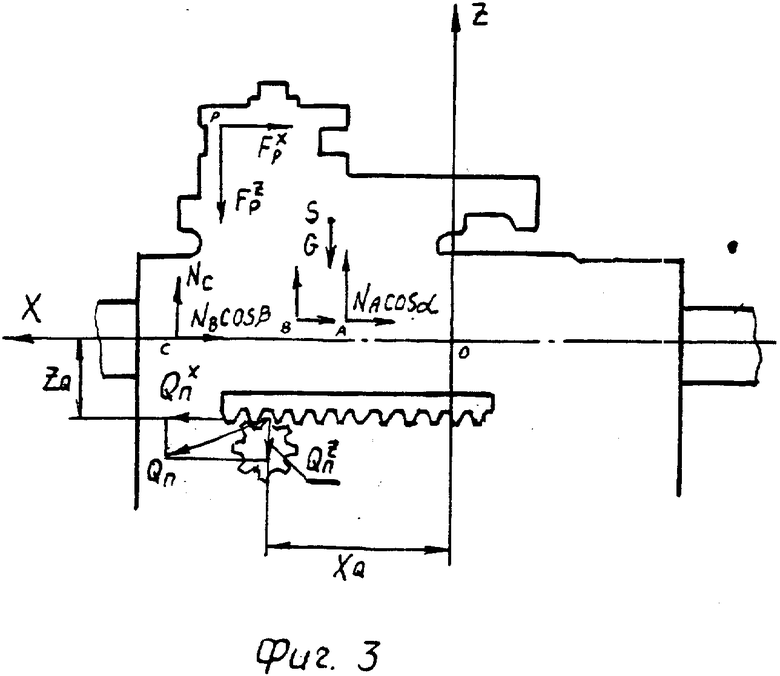
На фиг. 1, 2 и 3 изображен суппорт токарного станка с действующими на него силами.
На суппорт действуют следующие силы: F - силы инерции, приложенные в центре масс суппорта; m - масса суппорта,
- силы инерции, приложенные в центре масс суппорта; m - масса суппорта,  - ускорения центра масс.
- ускорения центра масс.
Установление функциональной связи между приводными силами, силами сопротивления и законом движения узла проведено с использованием уравнений кинетостатики.
Условие равновесия сил и их моментов относительно начала системы координат точки O, действующих на ползун (суппорт), запишем в виде: .
.
На фиг. 1, 2 и 3 показаны координаты векторов точек приложения сил, входящих в уравнение (2). Как видно из фиг. 1, 2 и 3, начало системы координат выбрано в точке, совпадающей с точкой пересечения линий действия сил NA и NB и расположена посередине длины l суппорта; точка C - точка приложения силы NC расположена на оси Y.
Составляющие векторов сил записываются в виде .
.
В уравнениях (3) ,
, - орты системы координат XYZ; ϕ - угол наклона рабочей поверхности A направляющей треугольной.
- орты системы координат XYZ; ϕ - угол наклона рабочей поверхности A направляющей треугольной.
Составляющие радиусов-векторов .
.
Уравнения (1), (2) в координатной форме имеют вид ;
;
Уравнения (6), (7), (8), (9), (10), (11) устанавливают функциональную связь между приводной силой Qn, силами сопротивления движению F в функции от пути S.
в функции от пути S.
Известными в этих уравнениях являются следующие величины:
XP, YP, ZP - координаты точки приложения силы резания FP;
XS, YS, ZS - координаты центра масс перемещаемого узла;
XQ, YQ, ZQ - координаты размещения приводной шестерни (точки приложения приводной силы Qn);
Известными являются также координаты точек приложения реактивных сил NA, NB, NC; YA, YB, YC; ZA, ZB, ZC; ϕ,ψ - углы треугольной направляющей.
Известно соотношение между Q
где α = 20o - угол зацепления шестерня-рейка.
Для заданного закона движения узла в функции от пути S
VS=  ускорение aS=
ускорение aS=  определяется выражением
определяется выражением .
.
Таким образом, задача сводится к поддержанию заданного закона изменения скорости VS= f(S). Выбор той или иной функции V = f(S) определяется, например, условиями равномерного износа рабочих поверхностей A, B и C направляющих (см. фиг. 1). Это условие выполняется, например, в случае, если будет соблюдено равенство значений реактивных сил NC, NA и NB (при одинаковой площади их поверхностей) и неизменных координат XC, YC, ZC; XA, YA, ZA; XB, YB, ZB (см. фиг. 1, 2, 3). Следует отметить, что силы NA=f(S), NB=f(S) и NC=f(S) в результате решения уравнений (6 - 11) также будут некоторыми функциями пути, поэтому задача сводится к определению некоторой функции Q
Установленная в уравнениях (6), (7), (8), (9), (10), (11) функциональная связь между приводной силой инерции сводится к тому, что каждому закону изменения скорости движения суппорта будет соответствовать определенный закон изменения приводной силы, т.е. в каждый момент времени нам известно значение скорости и значение силы Qn.
Наиболее удобным регулируемым параметром в предложенном способе является скорость вращения приводной шестерни.
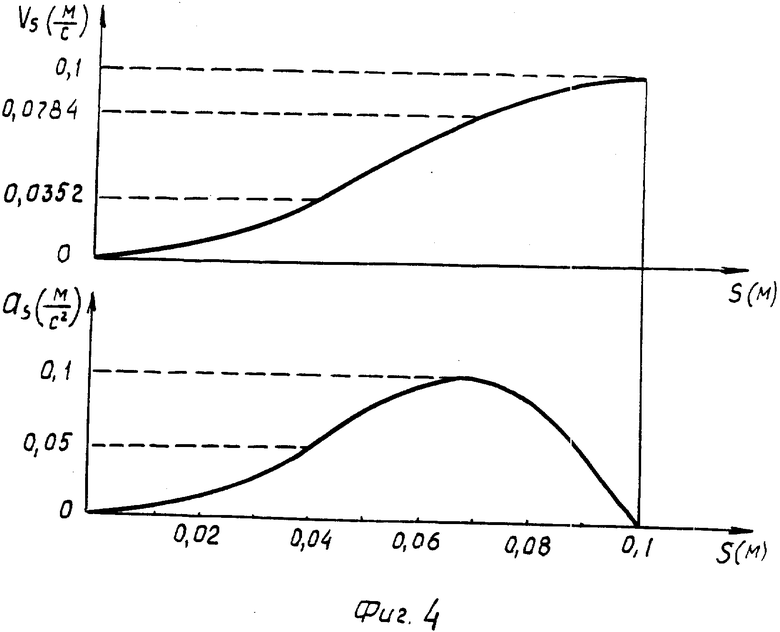
Пример. Пусть суппорту необходимо пройти путь Sk = 0,1 м с законом изменения скорости VS, задаваемым следующим аналитическим выражением ,
,
где
S - путь, проходящий суппортом.
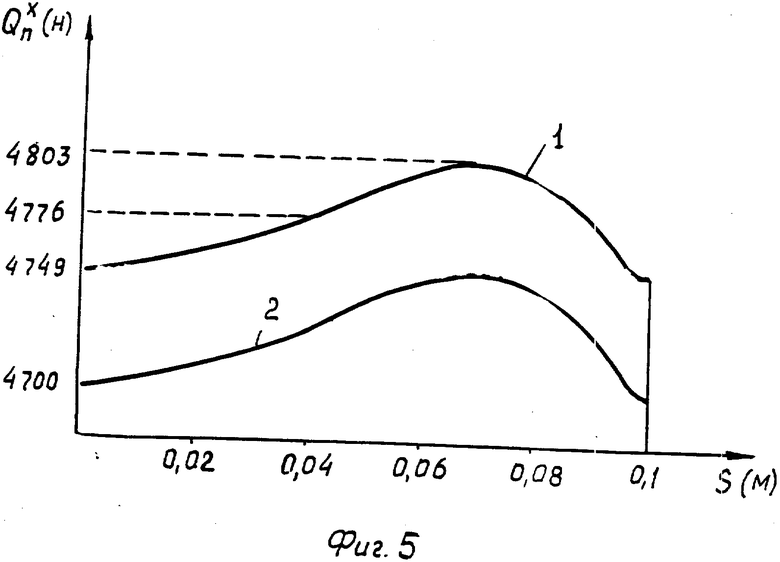
График зависимости (13) приведен на фиг. 4, график ускорения aS в функции пути S также приведен на фиг. 4. Для известного значения YQ (задаваемое) координаты размещения приводной шестерни (точки приложения силы Qn), решая систему уравнений (6), (7), (8), (9), с учетом (13) получим закон изменения (зависимость) приводной силы Q
На фиг. 5 приведены графики изменения Q
Q
Таким образом, скорость шестерни, как некоторая функция ωш , обеспечивающая поставленную цель, определится из выражения .
.
Уравнение (14) отражает только кинематическую сторону решаемой задачи. Обычно приводной двигатель связан с приводной шестерней коробкой подач (передаточными механизмами), имеющей некоторое передаточное число iдш= ωд/ωш . Равенство мощностей на валу приводного вала двигателя Mдωд и мощности Q ,
,
где
Mд, ωд - крутящий момент на валу приводного двигателя и его скорость соответственно.
Уравнение (15) указывает на то, что функция ω
Mд= Mн-K(ωд-ωн) (16) ,
где
K = Mн/ (ωc-ωн) - - крутизна механической характеристики двигателя; Mн - номинальное (паспортное) значение крутящего момента; ωн,ωд,ωc - номинальная, текущая и синхронная угловые скорости вала двигателя. Поэтому уравнение (15) с учетом уравнения (16) примет вид .
.
Из уравнения (17) после некоторых преобразований получим .
.
Из уравнения (18) видно, что требуемый закон ω
Сравнение формул (14) и (18) показывает, что в реальных условиях представлена возможность только приблизиться к требуемому закону движения узла, т. е. к реализации функции VS= ωш•rш . Поэтому алгоритм управления может быть разбит на несколько этапов, первый из них сводится к "жесткому" программному управлению, реализующему функцию ωш= f(s) = f(S) согласно уравнению (14). Дальнейшее действие заключается в следующем: для принятого закона V = f(S) по уравнениям (6 - 11) определяется функция Q
Если последним действием достичь существенного приближения функций ωш = f(S) и ω
Сущность способа управления приводом поступательного перемещения объясним на примере токарного станка, схема которого представлена на фиг.6.
На фиг. 6 (см. фиг. 1, 2, 3) суппорт 1 располагается на направляющих 2 (прямоугольной и треугольной, см. фиг. 1), с которыми жестко связана приводная рейка 3, в свою очередь входящая в зацепление с приводной шестерней 4. Приводной вал 5 электродвигателя 6 жестко связан с червяком 7, входящим в зацепление с червячной шестерней 8, установленной в суппорте 1. С червячной шестерней 8 жестко связана центральная шестерня 9, которая входит в зацепление с сателлитами 10, свободно посаженными на T-образный вал 11, с сателлитами 10 входит в зацепление шестерня 12, жестко связанная с конической шестерней 13, которая свободно посажена на T-образный вал 11, коническая шестерня 13 входит в зацепление с шестерней 14, жестко связанной с валом 15 корректирующего двигателя 16.
Предлагаемый способ управления приводом поступательного перемещения может быть реализован с помощью системы управления, включающей вычислительное устройство.
На фиг. 7 представлена структурная схема управления, реализующая описанный способ управления приводом поступательного перемещения. Система управления состоит из вычислителя 1, регулятора 2, корректирующего двигателя постоянного тока 3, связанного с приводной шестерней 4 через дифференциальный механизм (на схеме не показан), датчика 5 угловой скорости приводной шестерни Д1, источника постоянного напряжения 6, пульта управления 7.
Вычислитель 1 на основании сигналов с датчика Д1 формирует сигнал U3, пропорциональный величине напряжения, подаваемой от источника постоянного напряжения 6 через регулятор 2 на корректирующий двигатель постоянного тока 3, таким образом, что
U3 = KU3,
где
U3 - сигнал управления, вырабатываемый вычислителем 1;
K - коэффициент пропорциональности (усиления);
U3 - напряжение, подаваемое на корректирующий двигатель 3.
Датчик Д1-5 механически связан с приводной шестерней и вырабатывает сигнал, пропорциональный ее скорости вращения и крутящему моменту на ней соответственно.
Пульт управления 7 предназначен для включения-отключения привода поступательного перемещения.
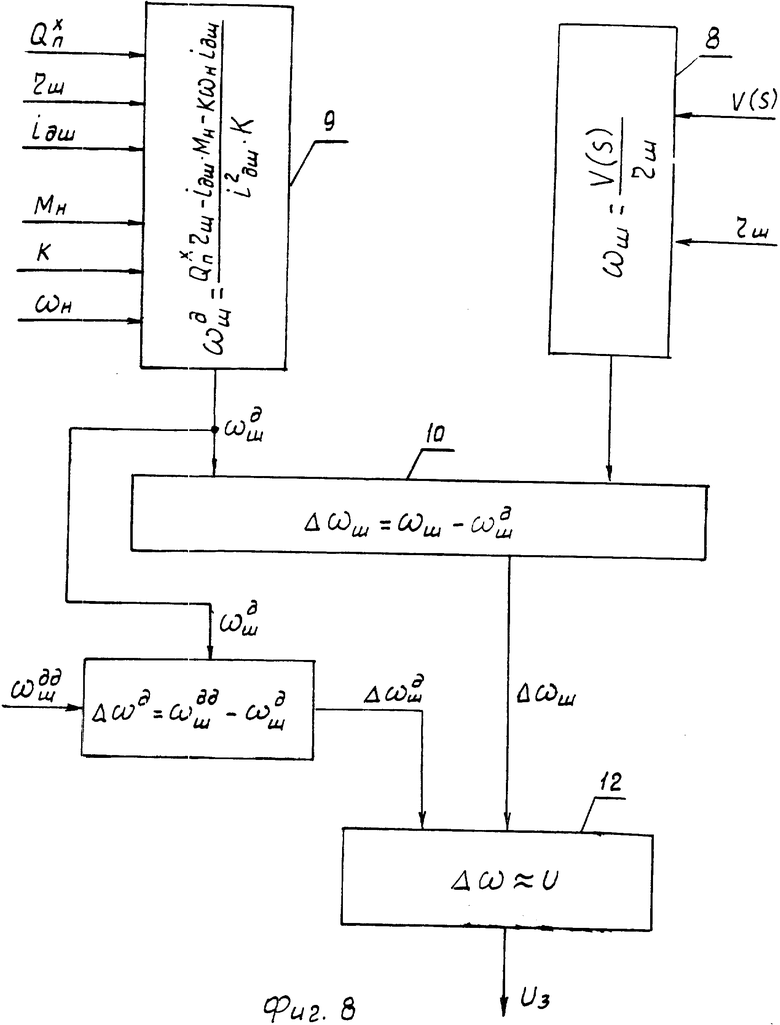
На фиг. 8 представлена структурная схема вычислителя 1.
В блоке 8 вычисляется значение скорости вращения приводной шестерни по формуле (14) при заданном (выбранном) делительном радиусе приводной шестерни rш, т.е.
 .
.
В блоке 9 вычисляется значение скорости вращения приводной шестерни по формуле (18) с учетом характеристик выбранного приводного двигателя, передаточного отношения между двигателем и приводной шестерней, делительного радиуса приводной шестерни, величины приводной силы Q
 .
.
Вычисленная величина ω
Δωш= ωш-ω
В блоке 11 вычисленная величина ω
Δω
Полученные в блоках 10 и 11 разности в блоке 12 преобразуются в значение управляющего сигнала U3.
Система управления приводом поступательного перемещения работает следующим образом.
В начальном положении система управления обесточена, т.е. напряжение Unum и Unosm равны нулю. Двигатель 3 не вращается.
С пульта управления 7 включается источник постоянного напряжения 6. На вычислитель 1 приходит питающее напряжение Unum.
Сигнал с датчика Д1-5 поступает в вычислитель 1. На основании этого сигнала в вычислителе 1 определяется значение Δω
U3нач = KU3нач,
которое заставляет двигатель вращаться. Вращение от корректирующего двигателя 3 через дифференциальный механизм передается к приводной шестерне, что приводит к изменению ее характеристик и соответственно к изменению сигнала с датчика Д1-5. Этот сигнал поступает в вычислитель 1, который вырабатывает новое значение U3, соответствующее сигналу датчика.
Обратная связь по скорости вращения приводной шестерни позволяет поддерживать действительную скорость перемещения узла на уровне заданной.
Использование предлагаемого способа управления приводом поступательных перемещений обеспечивает расширение эксплуатационных возможностей путем регулирования скорости вращения приводной шестерни, поддержание допустимых значений динамических реакций в направляющих, что в свою очередь обеспечивает регулирование их износа. Кроме того, способ позволяет снизить энергоемкость и металлоемкость проектируемых машин.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРОМЕХАНИЧЕСКИМ ПРИВОДОМ | 1991 |
|
RU2011910C1 |
| СПОСОБ ПОВЫШЕНИЯ ДОЛГОВЕЧНОСТИ ДЕТАЛЕЙ ПОДВИЖНЫХ СОЕДИНЕНИЙ МЕХАНИЗМОВ МАШИН | 1992 |
|
RU2107902C1 |
| СПОСОБ ПРОГРАММИРОВАНИЯ РЕКОНФИГУРИРУЕМОГО МАНИПУЛЯТОРА | 1991 |
|
RU2043914C1 |
| ДВУХСКОРОСТНОЙ МЕХАНИЗМ ПРИВОДА ЗАДНЕГО ВАЛА ОТБОРА МОЩНОСТИ УНИВЕРСАЛЬНО-ПРОПАШНОГО ТРАКТОРА | 1991 |
|
RU2025306C1 |
| ШАГОВЫЙ ЭЛЕКТРОПРИВОД | 1988 |
|
RU2076451C1 |
| СПОСОБ УПРАВЛЕНИЯ РАСХОДИМОСТЬЮ И ВОЛНОВЫМ ФРОНТОМ КОГЕРЕНТНОГО ИЗЛУЧЕНИЯ В КВАНТОВЫХ УСИЛИТЕЛЯХ | 1991 |
|
RU2069925C1 |
| УСТРОЙСТВО ЗАЩИТЫ ЭЛЕКТРОПРИВОДА ПЕРЕМЕННОГО ТОКА | 1991 |
|
RU2012972C1 |
| УСТРОЙСТВО ЗАЩИТЫ ЭЛЕКТРОПРИВОДА ПЕРЕМЕННОГО ТОКА | 1991 |
|
RU2012973C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ МЕТАЛЛИЧЕСКИХ ПОКРЫТИЙ | 1990 |
|
RU2010680C1 |
| УСТРОЙСТВО ДЛЯ ДВУСТОРОННЕЙ ОБРАБОТКИ ПЛОСКИХ ДЕТАЛЕЙ | 1991 |
|
RU2028914C1 |


Использование: машиностроение, способ управления приводом машины. Сущность изобретения: способ включает регулирование напряжения, подаваемого на приводной двигатель, с использованием закона перемещения в функции узла, связанного с приводной шестерней. Регулирование напряжения осуществляют посредством электрических сигналов, пропорциональных разности скоростей вращения приводной шестерни, полученных из условия равномерного распределения давлений на рабочих поверхностях перемещаемого узла, и из равновесия сил, приложенных к перемещаемому узлу. 8 ил.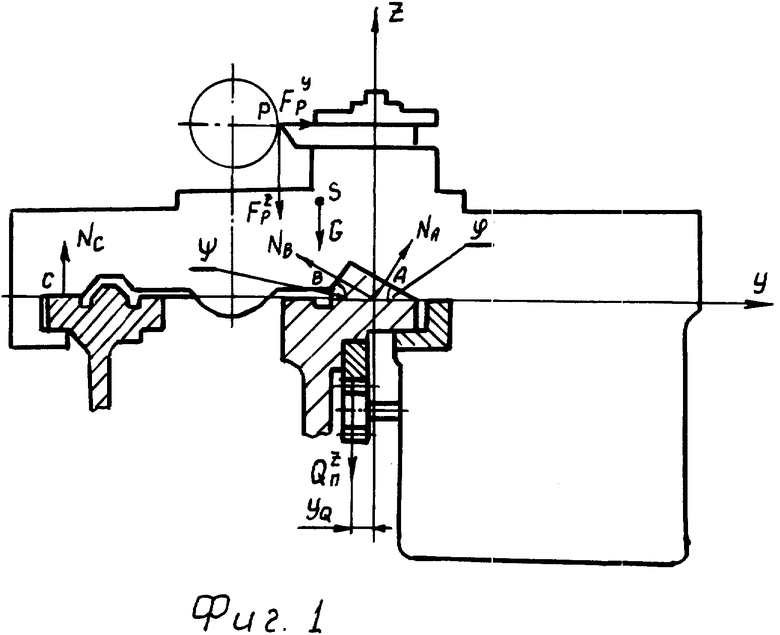
Способ управления приводом поступательных перемещений, включающий регулирование напряжения, подаваемого на приводной двигатель, с использованием закона перемещения в функции узла, связанного с приводной шестерней, отличающийся тем, что регулирование напряжения осуществляют посредством электрических сигналов, пропорциональных величинам, которые определяют по следующим зависимостям:
где Δω и ω
ωш - закон изменения скорости вращения приводной шестерни, который получают исходя из равномерного распределения давлений на рабочих поверхностях перемещаемого узла
где V(S) - закон изменения скорости перемещения узла в функции пути;
rш - делительный радиус приводной шестерни;
ω
где Q
iд ш - передаточное отношение между двигателем и приводной шестерней;
Mн - номинальный момент двигателя;
K = Mн(ωc-ωн) - крутизна механической характеристики двигателя;
ωн, ωc - номинальная и синхронная скорости вращения двигателя;
ωдд - действительная скорость вращения приводной шестерни.
| Спиридонов А.А., Федоров В.В | |||
| Металлорежущие станки с программным управлением | |||
| - М.: Машиностроение, 1971, с | |||
| Транспортер для перевозки товарных вагонов по трамвайным путям | 1919 |
|
SU105A1 |
| Способ запрессовки не выдержавших гидравлической пробы отливок | 1923 |
|
SU51A1 |
