СЛ
С


| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВИЖНЫЙ ПЕЛЕНГАТОР | 1992 |
|
RU2012902C1 |
| ПАССИВНАЯ ПЕЛЕНГАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2298803C2 |
| ПОДВИЖНЫЙ ПЕЛЕНГАТОР | 1997 |
|
RU2124222C1 |
| СИСТЕМА ПАССИВНОЙ ЛОКАЦИИ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 1991 |
|
RU2050557C1 |
| ПАССИВНАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ | 1989 |
|
SU1841037A1 |
| Адаптивный фильтр | 1981 |
|
SU1042163A1 |
| Грозопеленгатор-дальномер | 1984 |
|
SU1187120A1 |
| СПОСОБ И УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ НАДВОДНОЙ ЦЕЛИ В МОНОИМПУЛЬСНОЙ РЛС | 2004 |
|
RU2278397C2 |
| Устройство для тактовой синхронизации | 1989 |
|
SU1642591A1 |
| Устройство для формирования информации на телевизионном индикаторе | 1981 |
|
SU1075298A1 |

Сущность изобретения: подсистема определения дальности доплеровского радиопеленгатора содержит 1 синхронизатор (1), 9 сверхоперативных запоминающих устройства СОЗУ (2-11), 1 блок сглаживания (7), 5 перемножителей (13, 14, 15, 17), 1 сумматор 16, 2 преобразователя кодов 12, 19, 1 дифференцирующий блок 20. Что позволяет обеспечить определение наклонной дальности. 1т(2-11); 20-3.4: (2-6)-7-(8-11): 8-12- 13-14-16-19-18;9-15-16; 10-17-14; 11-18. 6 ил.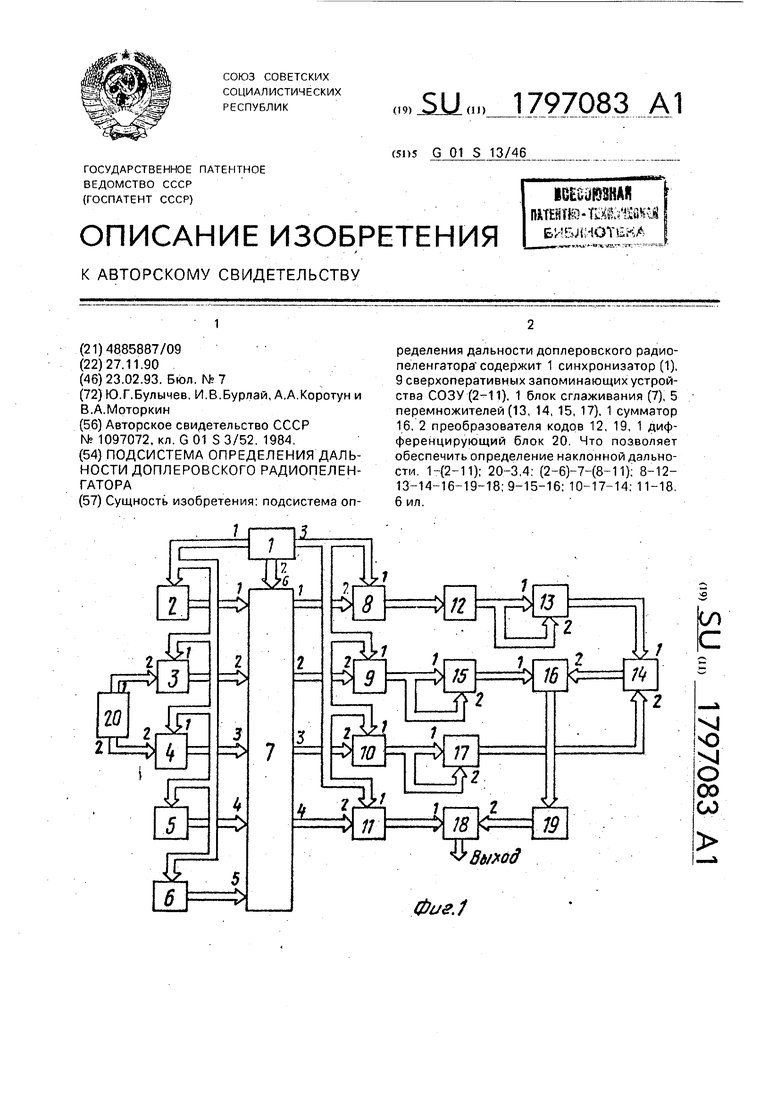
JrF
20
2lЈ
XI
о
xj О 00
00
Изобретение относится к радиолокации и может быть использовано в радионавигации, метеорологии, геодезии.
Известна радиолокационная станция, позволяющая определять положение обьек- та в пространстве. Недостатком РЛС является сложность конструкции и, следовательно, низкая надежность ее функционирования.
Известна радиодальномерная система, позволяющая определять дальность до ло- цируемой цели. Недостатком этой системы является низкая точность, обусловленная неучетом априорных сведений о характере движения объекта.
Наиболее близким по технической сущности к заявляемому изобретению является доплеровский радиопеленгатор, содержащий синхронизатор.
Недостатком прототипа являются огра- ничейные функциональные возможности, обусловленные невозможностью определения дальности до цели на основе измеренных угловых координат и радиальной
скорости на одном приемном пункте.
Цель изобретения - обеспечение определения наклонной дальности.
Поставленная цель достигается тем, что в доплеровский радиопеленгатор, содержа- щий синхронизатор, с целью обеспечения определения наклонной дальности введены девять сверхоперативных запоминающих устройств (СОЗУ), блок сглаживания, пять перемножителей, сумматор, два преобразо- вателя кодов, дифференцирующий блок, причем первый выход синхронизатора соединен со входами первого, второго, третьего, четвертого и пятого СОЗУ, второй выход синхронизатора соединен со входом блока сглаживания, а третий выход синхронизатора соединен со входами шестого, седьмого, восьмого и девятого СОЗУ. первый и второй выходы дифференцирующего блока подключены соответственно ко вторым входам второго и третьего СОЗУ, а выходы первого, второго, третьего, четвертого и пятого СОЗУ подключены соответственно ко второму, третьему, четвертому, пятому и шестому входам блока сглаживания, первый, второй, третий и четвертый выходы которого подключены соответственно ко вторым входам шестого/седьмого, восьмого и девятого СОЗУ, при этом выход шестого, седьмого, восьмого и девятого СОЗУ, при этом выход шестого СОЗУ подключен через первый преобразователь кодов к первым и вторым входам первого перемножителя, выход которого соединен с входом второго перемножителя, выход седьмого СОЗУ соединен с
первым и вторым входами третьего перемножителя, выход которого соединен со входом сумматора/ко второму входу которого подключен выход второго перемножителя, выход восьмого СОЗУ подключен к первому и второму входам четвертого перемножителя, выход которого соединён со вторым входом второго перемножителя, выход девятого СОЗУ соединен с первым входом пятого перемно- жителя, выход которого является выходом устройства, а выход сумматора через второй преобразователь кодов соединен со вторым входом пятого перемножителя,
Совокупность признаков, общих с прототипом и вновь введенных, позволяют определять наклонную дальность до лоцируемого объекта путем реализации инвариантно-группового алгоритма обработки. Согласно этому методу на небольшом интервале времени движение цели с достаточной точностью описывается моделью равномерного прямолинейного движения
fx(t) Хо + Vxt,
y(t) y0 + Vyt, z(t) Zo + V2t,
(1)
где х0, УО, вектор начального положения цели;
VT Vx, Vy, Vz - вектор скорости объекта.
Модели движения (1) соответствуют два независимых инварианта
h ух-ху.
l2 Zx Xz.(2)
Указанные инварианты сохраняют неизменные значения при подстановке в них текущих декартовых координат цели x(t), y(t), z(t) и их производных x(t), y(t), z(t). Формулы (2) с учетом связи декартовой системы координат с радиотехнической
х - rcosa cos /3, у rsina cos Д z rsln /J могут быть преобразованы к виду
И га acos2/ ci,, I2 r2(/ cosa+ asina) C2, (3) d Ci d C2
d t dt
0
Дифференцируя (З) по временим и разрешая относительно г, получаем
,/т - 2 fa... W-Taptgp a . 4
r(2)2 r (ft +cc tg a sin / cos )
2a/ tg«sln («tg a -t-a)
Поскольку на малых временных интервалах движение объекта предполагается не только прямолинейным, но и равномерным, то наряду с И и 2 существуют новые инварианты
з х сз,
d ci
Ц у С4. Is Z С5.
dt
0, 1 3,4,5.
Воспользовавшись изложенным ранее подходом, находим соответствующие инвариантам (з, 1д, Is формулы для определения дальности
r-2 r(mga+/ tg/3)
2 2
tgft(fi-2afttga) +a +fi + mg a
(6)
г(4)
г + 2r(f2ctgrZ-/ tg/3)
22
ig ft (ft + 2 aft ctg a ) 4- 2 a + ft - a ctg a
()
rra
fagfl-fi
(8)
Как показал несложный анализ, формулы (4)... (8) не зависят от а, поэтому полагая в них tg а 0 и tg n °о, получаем следующие независимые между собой и более про- стые выражения для определения дальности
r(Q,2l- 2 и ft tg ft-a
(9)
г(Ъ )
(10)
/ +« sin/ cos/
r(Q -LlcAifl A (11)
+ «2
2
(5)
r(9) IL9JL±1LЈ
(12)
В силу независимости формул (9)... (12) рассмотренный метод позволяет путем всевозможных преобразований над ними получить результирующие выражения для дальности, в которых в зависимости от реальных условий функционирования локатора могут быть исключены те компоненты вектора измерений, которые оцениваются с наибольшими погрешностями. На практике наиболее часто с высоким уровнем флуктуа- ционных погрешностей оцениваются угловые ускорения. Поэтому, путем несложных преобразований над формулами (9) ... (12) можно получить следующее, не зависящее
от «и/ выражение для наклонной дальности
25
г
/ 2+«2cos2/
(13)
0
5
0
5
0
которое положено в основу функционирования подсистемы определения дальности.
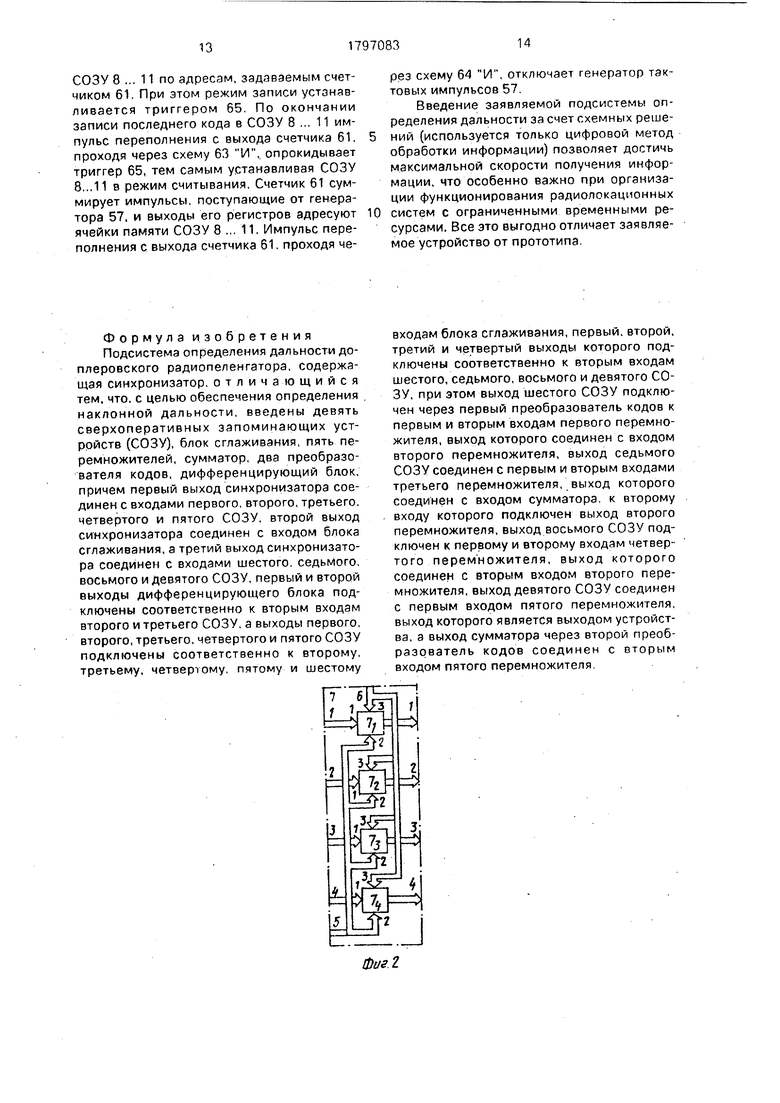
На фиг. 1 представлена структурная схема подсистемы определения дальности доплеровского радиопеленгатора. На фиг. 2 для третьего порядка сглаживающего полинома приведена структурная схема блока сглаживания. На фиг. 3 приведена схема возможной реализации узла сглаживания. На фиг. 4 приведена схема возможной реализации блока формирования оценок
/ , о., Д На фиг. 5 приведена схема возможной реализации блока формирования оценки г. На фиг. 6.приведена схема возможной реализации синхронизатора.
На фиг. 1 первый выход синхронизатора 1 соединен со входами первого 2, второго 3, третьего 4, четвертого 5 и пятого 6 СОЗУ, второй выход синхронизатора 1 соединен со входом блока сглаживания 7. а третий выход синхронизатора 1 соединен со входами шестого 8, седьмого 9, восьмого 10 и девятого 11 СОЗУ, первый и -торой выходы дифференцирующего блока 12 подключены соответственно ко вторым вх чдам второго 3 и третьего 4 СОЗУ, а выход:1 первого 2,
второго 3, третьего 4, четвертого 5 и пятого 6 СОЗУ подключены соответственно ко второму, третьему, четвертому, пятому и шестому входам блока сглаживания 7, первый, второй, третий и четвертый выходы которого подключены соответственно ко вторым входам шестого 8, седьмого 9, восьмого 10 и девятого 11 СОЗУ, при этом выход шестого СОЗУ 8 подключен через первый преобразователь кодов 13 к первым и вторым входам первого перемножителя 14, выход которого соединен с входом второго перемножителя 15, выход седьмого СОЗУ 9 соединен с первым и вторым входами третьего перемножителя 16, выход которого соединен со входом сумматора 17, ко второму .входу которого подключен выход второго перемножителя 15, выход восьмого СОЗУ 10 подключен к первому и второму входам четвертого перемножителя 18, выход которого соединен со вторым входом второго перемножителя 15, выход девятого СОЗУ 11 соединен с первым входом пятого перемножителя 19, выход которого является выходом устройства, а выход сумматора 17 через второй преобразователь кодов 20 соединен со вторым входом пятого перемножителя 19,.
На фиг, 2 второй ... пятый входы блока сглаживания 7 являются первыми входами узлов. Ti ... ТА сглаживания. Вторые входы узлов 7i ... 7/1 сглаживания соединены с шестым входом блока сглаживания 7. Третьи входы узлов71... 74сглаживания соединены с первым входом блока сглаживания 7. Выходы узлов 7i ... 1ц сглаживания являются первым ,.. четвертым выходами блока сглаживания 7.
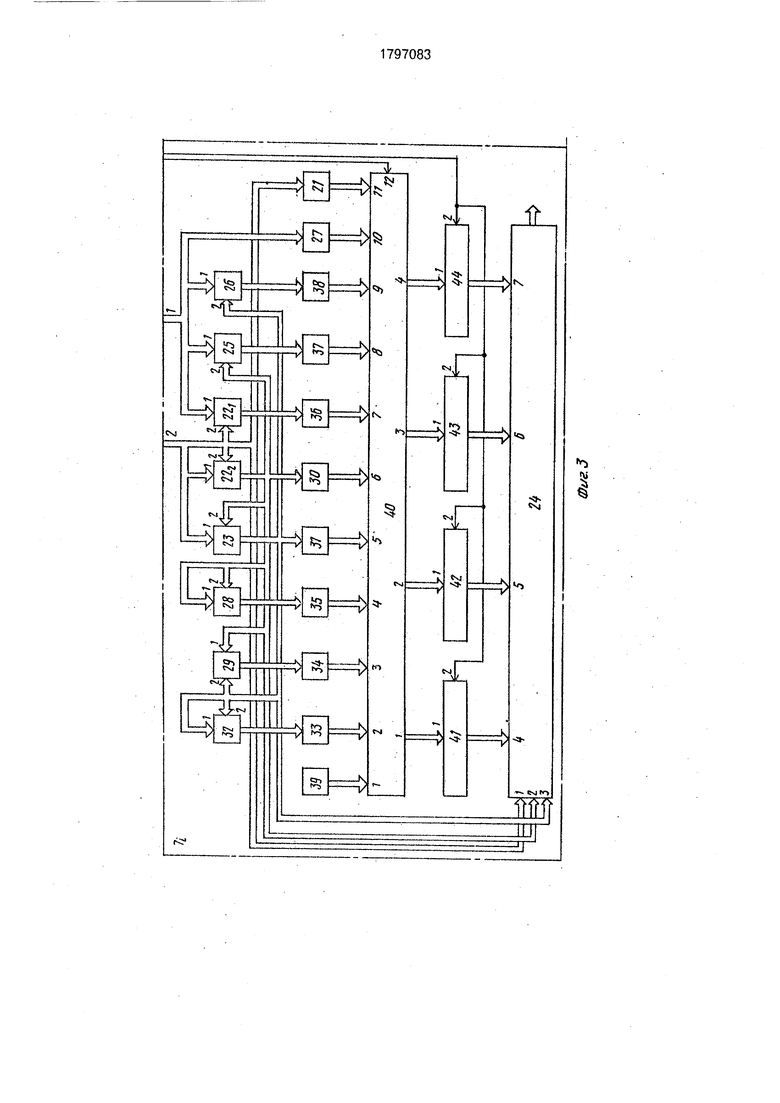
На фиг, 3 второй вход узла сглаживания 7i соединен со входом первого накапливающего сумматора 21. со вторым входом первого перемножителя 22i, первым и вторым входами второго перемножителя 222, первым входом третьего перемножителя 23 и первым входом блока формирования оценки 24. Первый вход узла сглаживания 71 соединен с первыми входами первого 22i, четвертого 25, пятого 26 перемножителей, а также со входом второго накапливающего сумматора 27, Выход второго перемножителя 222 соединен со вторым входом третьего перемножителя 23, первым и вторым входами шестого перемножителя 28, первым входом седьмого перемножителя 29, вторым входом блока формирования оценки 24, входом третьего накапливающего сумматора 30 и вторым входом четвертого перемножи- теля 25, Выход третьего перемножителя 23 соединен со вторым входом пятого перемножителя 26, входом четвертого накапливающего сумматора 31, вторым входом седьмого перемножителя 29, первым и вторым входами восьмого перемножителя 32 и третьим входом блока формирования оценки 24, Выходы восьмого 32, седьмого 29, шестого 28, первого 221, четвертого 25, пятого 26 перемножителей соединены соответственно со входами пятого 33, шестого 34, седьмого 35, восьмого 36, девятого 37,
десятого 38 накапливающих сумматоров. Выход программируемого постоянного запоминающего устройства 39 соединен с первым входом блока решения системы ли- нейных алгебраических уравнений
5 (БРСЛАУ) 40. Выходы пятого 33, шестого 34, седьмого 35, четвертого 31, третьего 30. первого 21, восьмого 36, девятого 37, десятого 38, второго 27 накапливающих сумматоров соединены соответственно со вторым ...
0 одиннадцатым входами БРСЛАУ40. Первый .., четвертый выходы БРСЛАУ 40 соединены соответственно с первыми входами первого 41 ... четвертого 44 регистров. Выходы первого 41 ... четвертого 44 регистров соедине5 ны с четвертым ... седьмым входами блока формирования оценки 24. Двенадцатый вход БРСЛАУ 40 является входом 3.1 узла сглаживания 7|. Вторые входы регистров 41 ... 44 являются входом 3.2 узла сглаживания
0 7|.
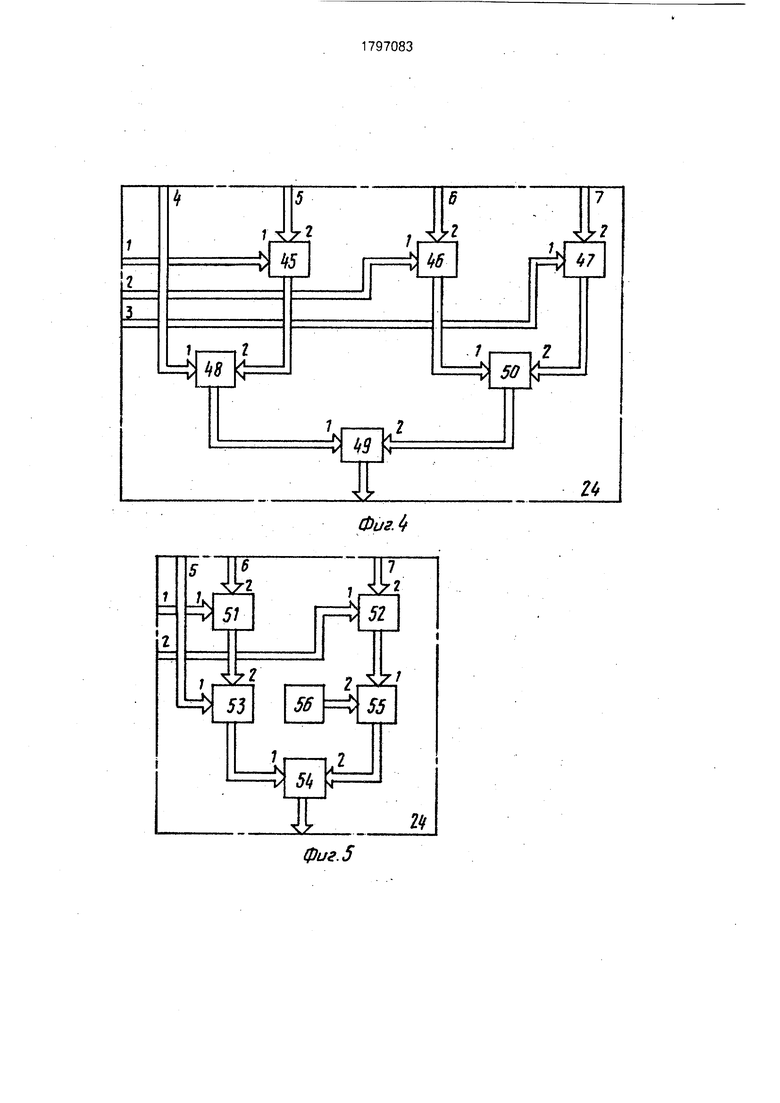
На фиг. 4 первый .,. третий входы блока 24 являются первыми входами соответственно первого 45, второго 46 и третьего 47 перемножителей, вторыми входами кото5 рых являются соответственно пятый, шес- . той и седьмой входы блока 24. Первый вход первого сумматора 48 является четвертым входом блока 24. Выход первого перемножителя 45 соединен со вторым входом пер0 вото сумматора 48, выход которого соединен с первым входом второго сумматора 49. Выход второго перемножителя 46 соединен с первым входом третьего сумматора 50. Выход третьего перемножителя 47
5 соединен со вторым входом третьего сумматора 50, выход которого соединен со вторым входом второго сумматора 49.
На фиг. 5 первый вход первого перемножителя 51 является первым входом блока
0 24. Второй вход первого перемножителя 51 соединен с шестым входом блока 24 со сдвигом на один разряд в сторону старших разрядов, что соответствует удвоению кода. Первый вход второго перемножителя 52 яв5 ляется вторым выходом блока 24; Второй вход второго перемножителя 52 является седьмым входом блока 24. Первый вход первого сумматора 53 является пятым входом блока 24, Выход первого перемножителя 51 соединен со вторым входом первого сумматора 53, выход которого соединен с первым входом второго сумматора 54. Выход второго перемножителя 52 соединен с первым входом третьего перемножителя 55, выход постоянного запоминающего устройства 56 соединен со вторым входом третьего перемножителя 55. Выход третьего перемножителя 55 соединен со вторым входом второго сумматора 54.
Синхронизатор 1 (фиг. 6) может быть выполнен следующим образом. Выход генератора тактовых импульсов 57 соединен с первыми входами первой 58 и второй 59 схем И. Второй вход первой 58 схемы И соединен с прямым выходом первого триггера 60. Выход первой 58 схемы И соединен со счетным входом 1 первого счетчика 61. Выход переполнения первого счетчика 61 соединен с первыми входами третьей 62, четвертой 63 и пятой 64 схем И. Выход четвертой 63 схемы И соединен с первым входом второго триггера 65, прямой выход которого соединен со вторым входом пятой 64 схемы И. Выход пятой 64 схемы И соединен с первым входом первой 66 схемы ИЛИ. Выход третьей 62 схемы И соединен со вторым входом первой 66 схемы ИЛИ и первым входом третьего триггера 67. Прямой выход третьего триггера 67 соединен со вторым входом второй 59 схемы И, выход которой соединен со счетным входом второго счетчика 68. Выход переполнения второго счетчика 68 соединен с первыми входами четвертого триггера 69 и второй 70 схемы ИЛИ. Выход второй 70 схемы ИЛИ соединен с первым входом первого триггера 60. Выход первой 66 схемы ИЛИ соединен со вторым входом первого триггера 60. Прямой выход четвертого триггера 69 соединен со вторым входом четвертой 63 схемы И. Инверсный выход четвертого триггера 69 соединен со вторым входом третьей 62 схемы И. Второй вход второй 70 схемы ИЛ И, вход установки второго счетчика 68. вход обнуления первого счетчика 61, а также вторые входы второго 65, третьего 67 и четвертого 69 триггеров соединены между собой и с гнездом Пуск. Первый выход синхронизатора 1 образуют выход генератора тактовых импульсов 57, выходы разрядов первого счетчика 61, а также прямой и инверсный выходы первого триггера 60. Второй выход синхронизатора 1 образуют выход второго счетчика 68, а также выход третьей 62 схемы И. Третий выход синхронизатора образуют выходы разрядов первого счетчика 61. прямой и инверсный выходы второго триггера 65, а также выход генератора тактовых импульсов 57.
Система работает следующим образом.
В СОЗУ 2 ... 6 соответственно загружены коды измеренных значений угла места
/ , угломестной скорости /3 , азимутальной
. скорости а , радиальной скорости г , а также значения временных отсчетов, соответ- ствующих измеренным координатам. Для
вычисления значений угломестной/ и азимутальной а скоростей в заявляемую под- 5 систему введен дифференцирующий, блок 12, который позволяет вычислять значения
/ и 7 по текущим значениям/} и а радиопеленгатора. По сигналу Пуск (фиг, 6) коды значений измеренных координат считываются из СОЗУ 2 .,, 6 и поступают в блок сглаживания 7. При этом прямой выход триггера 60 соединен со входами установки режима записи СОЗУ 2 ... 6; инверсный выход триггера 60 соединен со входами уста- новки режима считывания СОЗУ 2 ... 6; выход ГТИ 57 соединен со входами строби- рования записи или считывания СОЗУ 2 ...6, 8. ... 11; многоразрядный выход счетчика 61 соединен с адресными входами СОЗУ 2 ... 6, 8 ... 11; прямой и инверсный выходы триггера 65 соединены соответственно со входами установки режимов считывания и записи СОЗУ 8 ... 11. Выход счетчика 68 соединен со входом 3,1 блока 1, I 1, 4, сигнал с выхода счетчика 68 запускает БРСЛАУ 40; выход элемента И 62, соединен со входом 3.2 блока 7i, i 1, 4, сигнал с выхода элемента И 62 тактирует регистры 41 ... 44 (фиг. 3).
После сглаживания по управляющим
0
5
0
5
0
сигналам синхронизатора коды/,/,«, г записываются по соответствующим адресам в СОЗУ 8 ... 11. На этом цикл сглаживэния заканчивается. После этого коды сглаженных значений считываются и поступают на блоки 13 ... 20, реализующие алгоритм (13). На выходе преобразователя кодов 13 присутствует код, пропорциональный
созД а на первом входе перемножителя 15 - пропорциональный соз2Д На выходах перемножителей 16, 18 присутствуют коды, значения которых пропорциональны соответственно/ 2 и а . На выходе перемножителя 15 присутствует код. пропорцио- 2 2 о нальныи ft cos p, a на выходе сумматора
17 - код, пропорциональный/ 2 а2 cos2 .
На выходе преобразователя кодов 20 появляется величина, пропорциональная 1 /(/ +
+ a2cos2/), а на выходе перемножителя 19 - код искомой дальности.
Рассмотрим работу блока сглаживания 7. Его функционирование основано на применении метода наименьших квадратов, когда в качестве функции, аппроксимируюNCo+( | t,)Ci+( | t)C2+( Ј t)C3 2 «i,
.
NN . N „ N A N
( I t,)c0+( I .tf)Ci+( 2 t)c2+( 2 tp)c3 2 « t,.
1 1 1 1 1
(2 t)c0+( 2 t) ci+( I tp)c2+( 2 tF)c3 2«it2.
1 1 ... 1 -1 1 1 1
( VjCo+C 2 ( 2 thC2+( § tP)C3 I
i 1
t 1
i 1
i 1
i 1
В ППЗУ 39 хранится код величины N (коли- чества замеров координат). На выходе пере- множителя 222 имеется код, пропорциональный ti , перемножителя 23 - пропорциональный ti .перемножителя 28 - пропорциональный ti , перемножителя 29 - пропорциональный ti5, перемножителя 32 пропорциональный ti - пропорциональный
перемножителя 22т
aiti, перемножителя
25 -пропорциональный «iti2, перемножите- ля 26 - пропорциональный «iti . При этом коэффициенты системы (15) вычисляются в накапливающих сумма/горах 33 ... 38, 30, 31, 21/27.-.
После окончания вычисления, коэффициентов системы (15) по управляющему сигналу синхронизатора запускается БРСЛАУ 40. После окончания счета в БРСЛАУ 40 в регистры 41 ... 44 записываются коды, пропорциональные значениям коэффициентов Со, ci, C2, сз сглаживающего полинома (14). После этого из СОЗУ 6 считываются коды моментов времени, которые после прохождения перемножителей 222, 23 поступают на первый ... третий входы блока формирования оценок 24. Блок 24 формирует сглаженные значения измеренных координат в соответствии с выражением (14). Для формирования оценок второй производной от наклонной дальности служит блок 24 узла 74, изображенный на фиг. 5 и реализующий выражение
r ci + 2c2t + 3сзт
(16)
щей измеренные координаты на некотором временном интервале, для примера выбран временной полином третьей степени
a (t) Со + en + cat2 + cat3.
(14)
В этом случае система линейных алгебраических уравнений относительно коэффициентов Со, ci, С2, сз, отвечающая методу наименьших квадратов, имеет вид
(15)
§ tP)C3 I
i 1
i 1
0 5
0
5
0
5
0
Вычисленные значения сглаженных координат записываются в СОЗУ 8 ... 11.
Рассмотрим работу синхронизатора. По сигналу Пуск триггеры 60, 65, 69 устанавливаются в нулевые состояния, а в счетчик 68 записывается код предустановки. При этом открывается схема 58 И и на счетный вход счетчика 61 начинают поступать импульсы. При этом выходы разрядов счетчика
61 адресуют ячейки памяти СОЗУ 2 ... 6, а затем - СОЗУ 8 ... 11 (по выходу 3). Емкость счетчика 61 выбрана равной количеству ячеек памяти в СОЗУ 2 ... 6, 8 ... 11. Поэтому импульс переполнения с выхода счетчика 61 отвечает окончание считывания последнего кода из СОЗУ 2 ... 6 и, проходя через схему
62 И и схему 66 ИЛИ, опрокидывает триггеры 60 и 67. Кроме того, импульс с выхода схемы 62 И поступает на второй выход синхронизатора и запускает БРСЛАУ 40. В этом случае счетчик 61 отключается, а на счетный вход счетчика 68 начинают поступать импульсы от генератора 57. Емкость счетчика 68, а также значение кода пред- установки выбираются таким образом, чтобы импульс переполнения с его выхода соответствовал окончанию решения системы уравнений (15). Импульс переполнения с выхода счетчика 68 опрокидывает триггеры 60, 69 и на счетный вход счетчика 61 начинают поступать импульсы с генератора 57. Этот режим работы синхронизатора соответствует вычислению сглаженных значений измеренных координат и записи их в
СОЗУ 8 ... 11 по адресам, задаваемым счетчиком 61. При этом режим записи устанавливается триггером 65, По окончании записи последнего кода в СОЗУ 8 ... 11 импульс переполнения с выхода счетчика 61, проходя через схему 63 И, опрокидывает триггер 65, тем самым устанавливая СОЗУ 8...11 в режим считывания. Счетчик 61 суммирует импульсы, поступающие от генератора 57, и выходы его регистров адресуют ячейки памяти СОЗУ 8 ... 11. Импульс переполнения с выхода счетчика 61, проходя чеФормула изобретения Подсистема определения дальности до- плеровского радиопеленгатора, содержащая синхронизатор, отличающийся тем, что. с целью обеспечения определения наклонной дальности, введены девять сверхоперативных запоминающих устройств (СОЗУ), блок сглаживания, пять перемножителей, сумматор, два преобразователя кодов, дифференцирующий блок, причем первый выход синхронизатора соединен с входами первого, второго, третьего, четвертого и пятого СОЗУ, второй выход синхронизатора соединен с входом блока сглаживания, а третий выход синхронизатора соединен с входами шестого, седьмого. восьмого и девятого СОЗУ, первый и второй выходы дифференцирующего блока подключены соответственно к вторым входам второго и третьего СОЗУ, а выходы первого, второго, третьего, четвертого и пятого СОЗУ подключены соответственно к второму, третьему, четвертому, пятому и шестому
реэ схему 64 И, отключает генератор тактовых импульсов 57.
Введение заявляемой подсистемы определения дальности за счет схемных решений (используется только цифровой метод обработки информации) позволяет достичь максимальной скорости получения информации, что особенно важно при организации функционирования радиолокационных систем с ограниченными временными ресурсами. Все это выгодно отличает заявляемое устройство от прототипа.
входам блока сглаживания, первый, второй, третий и четвертый выходы которого подключены соответственно к вторым входам шестого, седьмого, восьмого и девятого СОЗУ, при этом выход шестого СОЗУ подключен через первый преобразователь кодов к первым и вторым входам первого перемножителя, выход которого соединен с входом второго перемножителя, выход седьмого СОЗУ соединен с первым и вторым входами третьего перемножителя, выход которого соединен с входом сумматора, к второму входу которого подключен выход второго перемножителя, выход восьмого СОЗУ подключен к первому и второму входам четвер- того перемножителя, выход которого соединен с вторым входом второго перемножителя, выход девятого СОЗУ соединен с первым входом пятого перемножителя, выход которого является выходом устройства, а выход сумматора через второй преобразователь кодов соединен с вторым входом пятого перемножителя.
фиг. 5
1
Фи г. Ь
4i
I
| Авторское свидетельство СССР № 1097072, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
