Изобретение относится к радиолокадиии и может быть использовано в радионавигации, метеорологии, геодезии.
Известен подвижный пеленгатор [2], позволяющий определить местоположение цели по угломерным данным на основе априорных сведений о характере движения, содержащий синхронизатор, устройство формирования пеленгов, блок вычисления коэффициентов, буферное запоминающее устройство, блок решения системы линейных алгебраических уравнений, блок медианых фильтров, блок определения местоположения, блок инерциальной системы навигации, устройство отображения.
Недостатком этого устройства является ограничение функциональных возможностей, так как устройство [2] не позволяет определить местоположение цели по угломерным данным для криволинейной модели движения.
Наиболее близким к заявленному устройству является подвижный пеленгатор [1], позволяющий определить местоположение цели по угломерным данным на основе априорных сведений о характере движения для криволинейной модели движения, содержащей устройство формирования пеленгов, буферное запоминающее устройство, блок решения систем линейных алгебраических уравнений, устройство отображения, блок инерциальной системы навигации, синхронизатор, вычислитель-формирователь, блок оценивания, блок вычисления декартовых координат цели.
Недостатком прототипа является относительная сложность конструкции измерительного канала, а также необходимость использования антенн, имеющих узкую диаграмму направленности по азимуту и углу места.
Заявляемое устройство позволяет определить параметры криволинейных траекторий по текущим угломерным данным подвижного одноканального пеленгатора, что является достигнутым техническим результатом.
Задача определения параметров криволинейной траектории движения объектов подвижным одноканальным пеленгатором решается путем исключения из устройства, содержащего устройство формирования пеленгов, буферное запоминающее устройство, блок решения систем линейных алгебраических уравнений, устройство отображения, блок инерциальной системы навигации, синхронизатор, вычислитель-фррмирователь, блок оценивания, блок вычисления декартовых координат цели, блока оценивания, а вместо вычислителя-формирователя введение блока вычисления коэффициентов, и организацией связи между ними.
Предлагается подвижный пеленгатор, содержащий устройство формирования пеленгов, блок вычисления коэффициентов, буферное запоминающее устройство, блок систем линейных алгебраических уравнений, блок вычисления декартовых координат цели, устройство отображения, синхронизатор, блок инерциальной системы навигации, при этом первый выход устройства формирования пеленгов соединен с первым входом блока вычисления коэффициентов, выход которого соединен с первым входом буферного запоминающего устройства, первый выход которого соединен с первым входом блока вычисления декартовых координат цели, с выхода которого коды, пропорциональные декартовым координатам цели, поступают на устройство отображения, первый выход устройства формирования пеленгов соединен с третьим входом буферного запоминающего устройства, причем по окончании записи в регистры буферного запоминающего устройства кодов последние по управляющему сигналу от синхронизатора записываются в блок решения системы линейных алгебраических уравнений, второй выход устройства формирования пеленгов соединен со входом синхронизатора, первый выход которого соединен со вторым входом блока решения системы алгебраических уравнений, второй выход синхронизатора соединен со вторым входом буферного запоминающего устройства, выход блока инерциальной системы навигации соединен со вторым входом блока вычисления коэффициентов, причем с выхода блока решения системы линейных алгебраических уравнений в блок вычисления декартовых координат цели поступают оценки искомых коэффициентов.
Как следует из описания совокупности признаков изобретения, новизна решения задачи состоит во введении вместо вычислителя-формирователя блока вычисления коэффициентов и исключении блока оценивания, а также организации связи между ними, что позволит определить местоположение по угломерным данным одноканального пеленгатора, это значительно упростит конструкцию подвижного пеленгатора по сравнению с прототипом.
На фиг.1 представлена структурная схема подвижного пеленгатора, она содержит: устройство формирования пеленгов 1, блок вычисления коэффициентов 2, буферное запоминающее устройство 3, блок решения системы линейных алгебраических уравнений 4, блок вычисления декартовых координат цели 5, устройство отображения 6, блок инерциальной системы навигации 7, синхронизатор 8. На фиг.2 представлена структурная схема возможной реализации блока вычисления коэффициентов (БВК) 2 (фиг.1), она содержит первый 11, второй 12, третий 13, четвертый 211...(3K+1)-й, 21K+1, 221...22K+1, 201...20K+1-й перемножителя, первый 14 и второй 15 сумматоры, первый 16, второй 17, третий 18, четвертый 191, (K+1)-й 19K+1-й - преобразователи кодов.
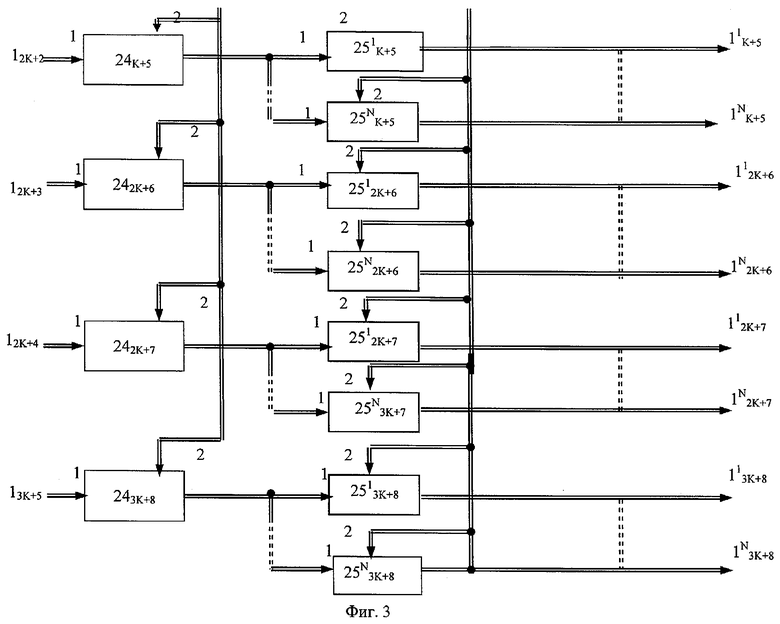
На фиг.3 представлена структурная схема возможной реализации буферного запоминающего устройства 3 (фиг.1), она состоит из 241...243K+8 сверхоперативных запоминающих устройств (СОЗУ), 251...25N (3K+8) регистров.
На фиг.4 представлена структурная схема возможной реализации блока вычисления декартовых координат цели 5 (фиг.1), она содержит первый 261...3K-й, 28K перемножители, первый 29, второй 30, третий 31 сумматоры.
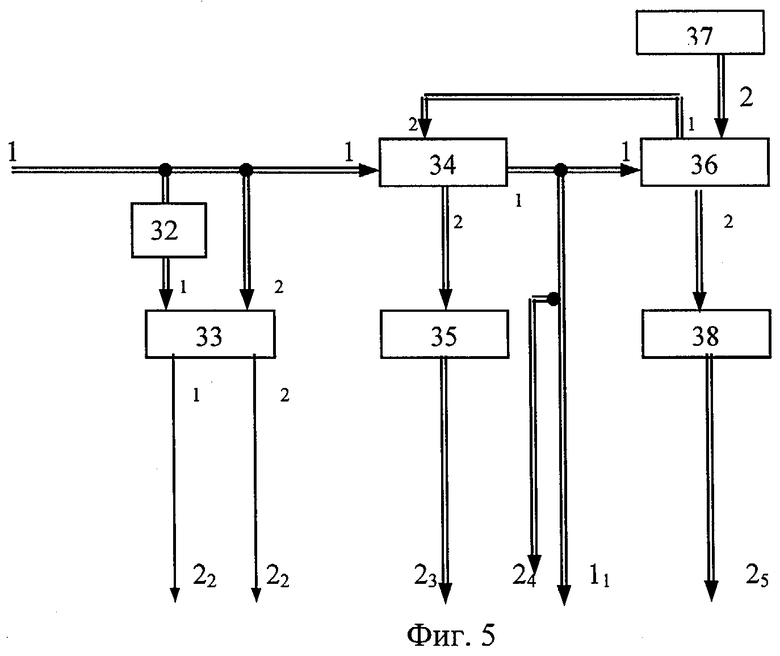
На фиг.6 представлена структурная схема возможной реализации синхронизатора 8 (фиг.1), она содержит линию задержки 32, триггер 33, первый счетчик 34, второй счетчик 35, первый дешифратор 35, второй дешифратор 38, генератор тактовых импульсов 37.
На фиг.1 первый выход устройства формирования пеленгов 1 соединен с первым входом блока вычисления коэффициентов 2, выход которого соединен с первым входом буферного запоминающего устройства 3, первый выход которого соединен с первым входом блока вычисления декартовых координат цели 5, с выхода которого коды, пропорциональные декартовым координатам цели, поступают на устройство отображения, первый выход устройства формирования пеленгов 1 соединен с третьим входом буферного запоминающего устройства 3, причем по окончании записи в регистры буферного запоминающего устройства кодов последние по управляющему сигналу от синхронизатора записываются в блок решения системы линейных алгебраических уравнений 4, второй выход устройства формирования пеленгов 1 соединен со входом синхронизатора 8, первый выход которого соединен со вторым входом блока решения системы алгебраических уравнений 4, второй выход синхронизатора 8 соединен со вторым входом буферного запоминающего устройства 3, выход блока инерциальной системы навигации 7 соединен со вторым входом блока вычисления коэффициентов 2, причем с выхода блока решения системы линейных алгебраических уравнений 4 в блок вычисления декартовых координат цели 5 поступают оценки искомых коэффициентов.
На фиг.2 первая шина первого входа 11 блока 2 соединена со входом преобразователей кодов 16 и 17, вторая шина первого входа 12 соединена со входом преобразователя кодов 18, выход преобразователя кодов 16 с первым входом перемножителя 11 и первыми входами перемножителей 211...21K+1, выходы которых составляют соответственно вторую 12...1K+2 шина выхода блока 2 (фиг.1), выход преобразователя кодов 17 соединен с первым входом перемножителя 12 и первыми входами переключателей 221...22K+1, выходы которых составляют 21K+3...212K+4-ю шины выхода блока 2 (фиг.1) выход преобразователя кодов 18 соединен с первым входом перемножителей 13 и первыми входами перемножителя 201...20K+1, выходы которых составляют 12K+5...13K+6-ю шины выхода блока 2 (фиг.1), входы преобразователей кодов 191...19K+1 соединен с третьей шиной первого входа блока 2 (фиг.1), входы преобразователей кодов 191...19K+1 соединен со вторыми входами перемножителей 211...21K+1, 221...22K+1, 201...20K+1, первая шина второго входа 21 блока 2 (фиг.1) соединен со вторым входом перемножителя 11, вторая шина второго входа 22 блока 2 (фиг.1) соединена со вторым входом перемножителя 12, третья шина второго входа 23 блока 2 соединена со вторым входом перемножителя 13, выход переключателя 11 соединен с первым входом сумматора 14, выход перемножителя 12 соединен с первым входом сумматора 15, выход перемножителя 13 соединен со вторым входом сумматора 15, выход сумматора 15 соединен со вторым входом сумматора 14, выход которого образует выходную шину 11 блока 2 (фиг.1).
На фиг.3 первая шина четвертого входа 41 БЗУ соединена с первым входом СОЗУ 241, первая шина третьего 11...13K+5 соединена соответственно с первыми входами СОЗУ 243...243K+8, первая шина второго входа соединена со вторыми входами СОЗУ 241...243K+8, вторая СОЗУ 243...243K+8 соединены соответственно с первыми входами регистров 243...243K+8 соединены соответственно с первыми входами регистров 251 1...25N 3K+8, входы регистров 251 3...25N 3K+8 образуют выходную шину первого выхода БЗУ 11 3...1N 3K+8, выходы регистров 251 2...25N 2 образуют выходную шину второго выхода БЗУ, выходы регистров 251 1...25N 1 образуют шину первого выхода БЗУ, вторые входы регистров 251 1...25N 3K+8 соединены со второй 22 шиной второго входа БЗУ.
На фиг.4 первая 11...13K шины первого входа блока 5 соединены с первыми входами 261...3K-го 28K перемножителей, выходы первого 261...26K перемножителей соединены соответственно с 1...K-м К входами первого 29 сумматора, выходы K+1-го 271...27K-го переключателей соединены соответственно с первым 1...K-м К входом второго сумматора 30, выходы (2K+1)-го 281...3K-го 28К перемножителей соединены соответственно с первым K-м К выходами третьего 31 сумматора, шина выхода сумматора соединена с выходом блока 5, вторые блоки переключателя 261...26K, 271...27K, 281...28K соединены с первой шиной второго входа блока 5, К+1-е входы сумматоров 29, 30, 31 соединены соответственно с шинами 13K+2, 13K+3, 13K+4, первого входа блока 5.
На фиг.5 вход синхронизатора 8 (фиг.1) соединен с входом счетчика 34 со вторым входом триггера 33 и с первым входом триггера 33 через элемент задержки 32. Первый и второй выходы триггера 33 соединены соответственно с первой 21 и второй 22 шиной второго выхода блока 9, второй выход счетчика 34 через дешифратор 35 соединен с третьей шиной 23 второго входа блока 9, первый выход счетчика 34 образует четвертую 24 шину второго выхода блока 9 и шину первого выхода блока 9, первый выход счетчика 34 соединен с первым входом счетчика 36, первый выход которого соединен со вторым входом счетчика 34, второй выход счетчика 36 соединен со входом дешифратора 38, выход которого составляет 5-ю шину второго выхода 25 синхронизатора 8 (фиг.1), выход генератора тактовых импульсов соединен со вторым входом счетчика 36.
Заявленное устройство реализует метод оценивания параметров криволинейности траекторий на базе высокоточных измерений угла наклона цели подвижным одноканальным пеленгатором при заданном программном изменении по углу с использованием полнономиальных моделей движения цели.
Пусть в декартовой XYZ системе координат (см. фиг.1) положение подвижного одноканального пеленгатора (Р) с плоской диаграммой направленности задается вектором

а объекта (С) - вектором

Движение объекта описывается следующей моделью:


где А, В, С - неизвестные векторные коэффициенты, Q(t) - вектор линейно независимых функций, Т - операция транспонирования.
Диаграмма направленности пеленгатора лежит в плоскости (см. фиг.1), которая жестко связана с геометрическим центром пеленгатора и направляющим вектором

задающим ось ее вращения.
В дальнейшем под одноканальным пеленгатором будем понимать измеритель, осуществляющий обнаружение и слежение цели по углу наклона θ(t) при заданном программном изменении (управлении) по углу

Угол θ(t) однозначно связан с μ(t), азимутом α(t) и углом места β(t) объекта известным соотношением:

При выполнении соотношения α(t)-μ(t)=nπ, принимаем

Если β(t)=±π/2, то независимо от α(t) и μ(t) имеем
θ(t)=±π/2.
Уравнение наблюдения одноканального пеленгатора имеет вид

где θk=θ(tk), а Δθk=Δθ(tk) - ошибки измерения.
Помимо массива  полагается заданным набор отсчетов
полагается заданным набор отсчетов  (где μk=μ(tk)), соответствующих некоторому программному управлению μ(t), характеризующему пространственное положение указанной выше плоскости с точностью до угла θ для любого момента времени t.
(где μk=μ(tk)), соответствующих некоторому программному управлению μ(t), характеризующему пространственное положение указанной выше плоскости с точностью до угла θ для любого момента времени t.
Введем множество  норм матриц, которые наиболее широко используются в теории и практике обработки измерительной информации. По отношению к этому множеству полагаем, что выполняются следующие неравенства
норм матриц, которые наиболее широко используются в теории и практике обработки измерительной информации. По отношению к этому множеству полагаем, что выполняются следующие неравенства


где





W - заданная весовая матрица.
В каждом конкретном для практики случае, с учетом возможностей используемого подвижного пеленгатора, а также условий наблюдения объекта, не представляет труда найти такие константы γm и ϕm, для которых неравенства (10), (11) будут иметь место. Эти неравенства определяют минимально необходимый объем априорной информации, привлекаемый к решению задачи оценивания параметров движения объекта.
Требуется разработать метод оценивания параметров движения объекта по данным подвижного одноканального пеленгатора с учетом моделей (1)-(12).
РЕШЕНИЕ ЗАДАЧИ В ДЕТЕРМИНИРОВАННОЙ ПОСТАНОВКЕ
Для дальнейших рассуждений воспользуемся известным соотношением (см. фиг.1)

где

 - вектор относительных координат цели,
- вектор относительных координат цели,

r(t) - наклонная дальность.
Формулу (7) представим в несколько ином виде:

Для определения величин


которые с учетом (3) и (13) позволяют записать


Подставляя (19), (20) в (16), получим выражение

которое после несложных преобразований принимает следующий вид:

Применяя к (22) операцию транспонирования, получаем

где

Вводя обозначение G=[AT, BT, CT]T, вместо (23) для одного момента времени t можно записать

соответственно для N моментов времени  получаем
получаем

Если N=3(K+!) и detΨ≠0, то система уравнений (26) при отсутствии ошибок измерений позволяет найти вектор G искомых коэффициентов модели (3) на базе семейств  и
и  :
:

Выражения (13)-(27) дают решение задачи оценивания параметров движения объекта по данным одноканального подвижного пеленгатора в детерминированной постановке.
РЕШЕНИЕ ЗАДАЧИ В СТАТИСТИЧЕСКОЙ ПОСТАНОВКЕ
При избыточности измерений (когда N=3(K+1) и с учетом погрешностей  задача нахождения оптимальной оценки вектора
задача нахождения оптимальной оценки вектора  может быть решена в оптимальной постановке из условия минимума следующей квадратичной формы.
может быть решена в оптимальной постановке из условия минимума следующей квадратичной формы.


где

Оптимальная оценка  получаемая на основе минимизации J(G), является решением системы линейных алгебраических уравнений
получаемая на основе минимизации J(G), является решением системы линейных алгебраических уравнений

где матрицы  и вектор
и вектор  раскрыты в пояснениях к формулам (10) и (11).
раскрыты в пояснениях к формулам (10) и (11).
Непосредственно из (30) получаем окончательное выражение для искомой оценки

Задача оценивания параметров модели (3) наблюдения, как показано в [3].
Подвижный пеленгатор (фиг.1) работает следующим образом: код измерений пеленга θ(tk), коды μ(tk), а также соответствующие им моменты времени tk с выхода устройства формирования пеленга поступают на первый вход блока вычисления коэффициентов, который аппаратно реализует выражения 24, 12 с учетом 10, 11. На первую шину 11 первого входа БВК (фиг.2) поступает код, пропорциональный μ(tk), на шину 12 поступает код, пропорциональный θ(tk), на шину 13 поступает код, пропорциональный текущему времени tk, на выходе ПК-16 имеет место код пропорциональной sinμ(tk), на выходе ПК-17 код, пропорциональный cosμ(tk), на выходе ПК-18 код пропорционален tg-1θ(tk).
На выходе преобразователей 191...19K+1 имеет место код пропорций  , на выходах перемножителей 211...21K+1 имеет место преобразований sinμ(tk)ti...sinμ(tk)ti K+1, на выходе перемножителей 221...22K+1 имеет место коды, преобразующие cosμ(tk)ti...cosμ(tk)ti K+1, на входе перемножителей 201...20K+1 имеют место коды, пропорциональные tg-1θ(tk)ti...tg-1θ(tk)tK+1 i. На первые входы перемножителей 11, 12, 13 поступают коды, пропорциональные соответственно sinμ(tk), -cosμ(tk), tg-1θ(tk), на вторые входы этих перемножителей поступают коды, пропорциональные декартовым координатам пеленгатора, поступают с блока 7 (фиг.1), который выполнен в соответствии [5]. И на первой шине первого выхода 11 (фиг.2) имеют место коды, пропорциональные f(tk).
, на выходах перемножителей 211...21K+1 имеет место преобразований sinμ(tk)ti...sinμ(tk)ti K+1, на выходе перемножителей 221...22K+1 имеет место коды, преобразующие cosμ(tk)ti...cosμ(tk)ti K+1, на входе перемножителей 201...20K+1 имеют место коды, пропорциональные tg-1θ(tk)ti...tg-1θ(tk)tK+1 i. На первые входы перемножителей 11, 12, 13 поступают коды, пропорциональные соответственно sinμ(tk), -cosμ(tk), tg-1θ(tk), на вторые входы этих перемножителей поступают коды, пропорциональные декартовым координатам пеленгатора, поступают с блока 7 (фиг.1), который выполнен в соответствии [5]. И на первой шине первого выхода 11 (фиг.2) имеют место коды, пропорциональные f(tk).
Вычисление коэффициентов по сигналам управления с выхода 1 синхронизатора 8 записываются в БЗУ 3 (фиг.3). В промежутках между тактами записи БЗУ 3 находится в режиме считывания и по тактам считывания информации из СОЗУ 243...243K+8 записывается в регистры 251 1...25N 3K+8. Порядок записи информации из СОЗУ 243...243K+8 в регистры 251 1...25N 3K+8 управляет дешифратор 35 синхронизатора 8. При этом в регистре 251 1...25N 1 записываются коды, пропорциональные  , в регистры 251 2...25N 2 записываются коды, пропорциональные ti, в регистры 251 3...25N K+4 коды, пропорциональные sinμ(tk)ti...sinμ(tk)ti K+1 в регистры 251 K+5...25N K+6 коды, пропорциональные -cosμ(tk)ti...-cosμ(tk)ti K+1, в регистры 251 2K+7...25N 3K+8 коды пропорциональны tg-1θ(tk)ti...tg-1θ(tk)tK+1 i. По окончании записи кодов в регистры последние по управляющему сигналу, поступающему от синхронизатора 8, записываются в блок решения систем линейных алгебраических уравнений 4, который может быть выполнен в соответствии с [4]. По сигналу «Пуск», который поступает со второго выхода синхронизатора 8 на второй вход блока 4 (фиг.1), который может быть вычислен в соответствии с [4], последний обрабатывает порядки решения уравнения (3.1). Оценки искомых коэффициентов с выхода блока 4 поступают на первый вход блока вычисления декартовых координат цели 5. На второй вход блока 5 поступают коды, пропорциональные моменту времени ti...tN. Структура блока 5 реализует выражение (3) и, следовательно, на его выходе имеют место коды, пропорциональные декартовым координатам цели xс, yс, zc на текущий момент времени, которые поступают на устройство отображения 6.
, в регистры 251 2...25N 2 записываются коды, пропорциональные ti, в регистры 251 3...25N K+4 коды, пропорциональные sinμ(tk)ti...sinμ(tk)ti K+1 в регистры 251 K+5...25N K+6 коды, пропорциональные -cosμ(tk)ti...-cosμ(tk)ti K+1, в регистры 251 2K+7...25N 3K+8 коды пропорциональны tg-1θ(tk)ti...tg-1θ(tk)tK+1 i. По окончании записи кодов в регистры последние по управляющему сигналу, поступающему от синхронизатора 8, записываются в блок решения систем линейных алгебраических уравнений 4, который может быть выполнен в соответствии с [4]. По сигналу «Пуск», который поступает со второго выхода синхронизатора 8 на второй вход блока 4 (фиг.1), который может быть вычислен в соответствии с [4], последний обрабатывает порядки решения уравнения (3.1). Оценки искомых коэффициентов с выхода блока 4 поступают на первый вход блока вычисления декартовых координат цели 5. На второй вход блока 5 поступают коды, пропорциональные моменту времени ti...tN. Структура блока 5 реализует выражение (3) и, следовательно, на его выходе имеют место коды, пропорциональные декартовым координатам цели xс, yс, zc на текущий момент времени, которые поступают на устройство отображения 6.
Рассмотрим работу синхронизатора 8 (фиг.5). Импульсы с выхода 2 устройства формирования пеленга 1 поступают на счетчик вход счетчика 34, который формирует код адреса для дешифратора 35 управляющего порядок записи в регистры 251 2K+7...25N 3K+8 (фиг.4), после подсчета N-импульсов счетчик формирует сигнал на разрешение считывания информации из регистров 251 1...25N 1, 251 3...25N 3K+8 и «Пуск» БРСЛ АУ 4, этот же сигнал разрешает работу счетчика 36 для подсчета N импульсов от ГТИ 37, счетчик 36 формирует код адреса для дешифратора 36, который управляет порядок считывания из регистров 251 2...25N 2, где хранятся коды текущего времени, после подсчета N импульсов счетчик 36 формирует сигнал разрешения счета счетчика 34. Импульсы с выхода 2 устройства формирования пеленга 1 поступают также на второй вход триггера 35, выходной сигнал которого учитывает СОЗУ 241...243K+8 в режиме записи, на первый вход триггера 35 с блока 1 (фиг.1) поступают через элемент задержки формирования на входе сигнала считывания информации из СОЗУ 241...243K+8 (фиг.3).
ЛИТЕРАТУРА
[1] Патент РФ 2124222 C1, 6 G01S 13/46, 1997.
[2] Патент РФ 2012902, 5 G01S 13/46, 1996.
[3] Робастое оценивание движения объекта по данным одноканального пеленгатора. АВТ 2002, с.22-32. Булычев Ю.Г., Шухардин А.Н.
[4] АС СССР №1508235, G06F 15/36, 1987.
[5] Гранов Г.Н. Дифференциально-геометрический метод навигации. М.: Радио и связь, 1980.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПАССИВНАЯ ПЕЛЕНГАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2298803C2 |
| ПОДВИЖНЫЙ ПЕЛЕНГАТОР | 1997 |
|
RU2124222C1 |
| ПОДВИЖНЫЙ ПЕЛЕНГАТОР | 1992 |
|
RU2012902C1 |
| СИСТЕМА ПАССИВНОЙ ЛОКАЦИИ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 1991 |
|
RU2050557C1 |
| Устройство отождествления наборов данных | 1989 |
|
SU1654810A1 |
| УСТРОЙСТВО ОТОЖДЕСТВЛЕНИЯ НАБОРОВ ДАННЫХ | 2010 |
|
RU2427884C1 |
| Подсистема определения дальности доплеровского радиопеленгатора | 1990 |
|
SU1797083A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ДАЛЬНОСТИ ДО ДВИЖУЩЕЙСЯ ЦЕЛИ ПО МИНИМАЛЬНОМУ ЧИСЛУ ПЕЛЕНГОВ | 2009 |
|
RU2406098C1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ МЕСТНОСТИ | 1988 |
|
SU1841035A1 |
| ЭЛЕКТРОННО-ЦИФРОВОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ С ДИФФЕРЕНЦИАЛЬНОЙ И ИНТЕГРАЛЬНОЙ СЕЛЕКЦИЕЙ ПОДВИЖНЫХ ОБЪЕКТОВ НАБЛЮДЕНИЯ | 2014 |
|
RU2561310C1 |



Изобретение относится к радиолокации и может быть использовано в радионавигации, метеорологии, геодезии. Заявляемое устройство позволяет определить параметры криволинейных траекторий по угломерным данным одноканального подвижного пеленгатора, что является достигаемым техническим результатом. Устройство содержит устройство формирования пеленга, блок вычисления коэффициентов, блок инерциальной системы навигации, буферное запоминающее устройство, блок решения системы линейных алгебраических уравнений, блок вычисления декартовых координат цели, устройство отображения. 5 ил.
Подвижный пеленгатор, содержащий устройство формирования пеленгов, буферное запоминающее устройство, блок решения системы линейных алгебраических уравнений, блок вычисления декартовых координат цели, устройство отображения, блок инерциальной системы навигации, синхронизатор, отличающийся тем, что в него также введен блок вычисления коэффициентов, при этом первый выход устройства формирования пеленгов соединен с первым входом блока вычисления коэффициентов, выход которого соединен с первым входом буферного запоминающего устройства, первый выход которого соединен с первым входом блока вычисления декартовых координат цели, с выхода которого коды, пропорциональные декартовым координатам цели, поступают на устройство отображения, первый выход устройства формирования пеленгов соединен с третьим входом буферного запоминающего устройства, причем по окончании записи в регистры буферного запоминающего устройства кодов последние по управляющему сигналу от синхронизатора записываются в блок решения системы линейных алгебраических уравнений, второй выход устройства формирования пеленгов соединен со входом синхронизатора, первый выход которого соединен со вторым входом блока решения системы алгебраических уравнений, второй выход синхронизатора соединен со вторым входом буферного запоминающего устройства, выход блока инерциальной системы навигации соединен со вторым входом блока вычисления коэффициентов, причем с выхода блока решения системы линейных алгебраических уравнений в блок вычисления декартовых координат цели поступают оценки искомых коэффициентов.
| ПОДВИЖНЫЙ ПЕЛЕНГАТОР | 1997 |
|
RU2124222C1 |
| ПОДВИЖНЫЙ ПЕЛЕНГАТОР | 1992 |
|
RU2012902C1 |
| СИСТЕМА ПАССИВНОЙ ЛОКАЦИИ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 1991 |
|
RU2050557C1 |
| Симметричный кабель | 1987 |
|
SU1453451A1 |
| Устройство для измерения ускорений | 1984 |
|
SU1191831A1 |
| JP 2000241179 A, 28.02.2000. | |||

