Изобретение относится к отрасли судостроения, к специальным устройствам, в частности к судовым спуско-подъемным устройствам для подводных аппаратов (далее - аппараты).
Для мирного освоения океана с целью обнаружения и добычи полезных ископаемых, биологических ресурсов на пользу человека, а также для решения задач по инспекции и обслуживанию подводных объектов морских нефтегазопромыслов разрабатывается и используется большое количество глубоководных технических средств - обитаемых и необитаемых, автономных и неавтономных поисковых, научно-исследовательских технических и специальных глубоководных аппаратов и систем, которые могут буксироваться на заданной глубине, опускаться на заданную глубину в дрейфе судна, работать автономно.
В настоящее время появилась необходимость спуска на воду аппаратов, состоящих из двух модулей: грузового модуля, выполненного в виде объемной рамной конструкции с кабельной лебедкой, и управляемого аппарата, снабженного двигателями и телеаппаратурой. Управляемый аппарат, смыкающийся с грузовым модулем не контролируемо, также как и грузовой модуль, выполняется либо в виде цилиндра, либо прямоугольным или квадратным в поперечном сечении, либо комбинированным (круглым и прямоугольным или квадратным в сечении). Несущая конструкция выполняется в виде рамы из тонкостенных труб, которая может легко деформироваться при ударе. Поэтому разрабатываются устройства, предотвращающие или ограничивающие амплитуду раскачивания аппарата в процессе разворота СПУ и при постановке его на кильблоки.
Наиболее близким по конструктивным признакам аналогом предполагаемого изобретения является судовое спуско-подъемное устройство, включающее в себя металлоконструкцию СПУ, трособлочную систему с захватами, на которых подвешен аппарат. На судовой конструкции установлены рычаги с упругими роликами и гидроцилиндрами их подъема. Гидроцилиндры связаны между собой следящей гидросистемой, управляющей движением рычагов в зависимости от перемещения аппарата. При посадке аппарата на кильблоки рычаги упругими роликами соприкасаются с корпусом аппарата. При качке аппарат отклоняет пару рычагов с одного борта. Следящая гидросистема увеличивает давление в гидроцилиндрах этих рычагов и уменьшает амплитуду перемещения аппарата. При отклонении на другой борт следящая гидросистема управляет следующей парой рычагов. Рычаги, сближаясь, устанавливают аппарат над посадочным местом.
Недостатки устройства: оно предназначено для центровки и сдерживания аппаратов только при нахождении его над кильблоками, тем самым не исключая его раскачивания в других положениях при работе СПУ, что увеличивает динамические нагрузки на аппарат и металлоконструкции, которые приводят к необходимости увеличения масс и габаритов самого аппарата и СПУ; оно позволяет предотвращать раскачивание при посадке на кильблоки аппаратов с несколькими точками подвеса, т. е. имеющих перемещение при раскачивании в одной плоскости и исключающих кручение аппарата. При работе с аппаратом, имеющим одну точку подвеса, устройство не предотвращает его раскачивание, так как в процессе захвата аппарата спуско-подъемным устройством он не имеет ориентированного положения относительно СПУ. Поэтому при посадке на кильблоки рычаги могут взаимодействовать с корпусом аппарата и ограничивать амплитуду его раскачивания с одного его борта и не взаимодействовать с другого. Это может привести к повреждению аппарата при повторном навале на рычаги.
Цель изобретения - предотвращение раскачивания в процессе разворота СПУ и постановки на кильблоки аппарата, имеющего одну точку подвеса.
Указанная цель достигается тем, что в устройстве, содержащем металлоконструкцию для выноса за борт подводного аппарата с захватом последнего и приводом, а также центрирующий механизм, выполненный с симметрично расположенными рычагами с упругими элементами на рабочих поверхностях и гидроцилиндры привода поворота этих рычагов, центрирующее устройство снабжено подъемной рамой, соединенной с упомянутой металлоконструкцией посредством горизонтальной оси и приводом поворота этой подъемной рамы с гидроцилиндром, связанным с последним. Каждый рычаг центрирующего механизма выполнен из шарнирно связанных между собой корневой и концевой секций, рабочие поверхности которых выполнены цилиндрическими. Корневая секция шарнирно связана с подъемной рамой и соответствующим гидроцилиндром привода поворота рычага, установленным на этой раме. Центрирующий механизм снабжен угловыми двуплечими рычагами, каждый из которых шарнирно установлен своей средней частью на корневой секции соответствующего рычага, подпружинен относительно ее и расположен с возможностью взаимодействия одним из своих плеч в положении по-походному с подъемной рамой, а другим своим плечом связан посредством толкателя с концевой секцией этого рычага.
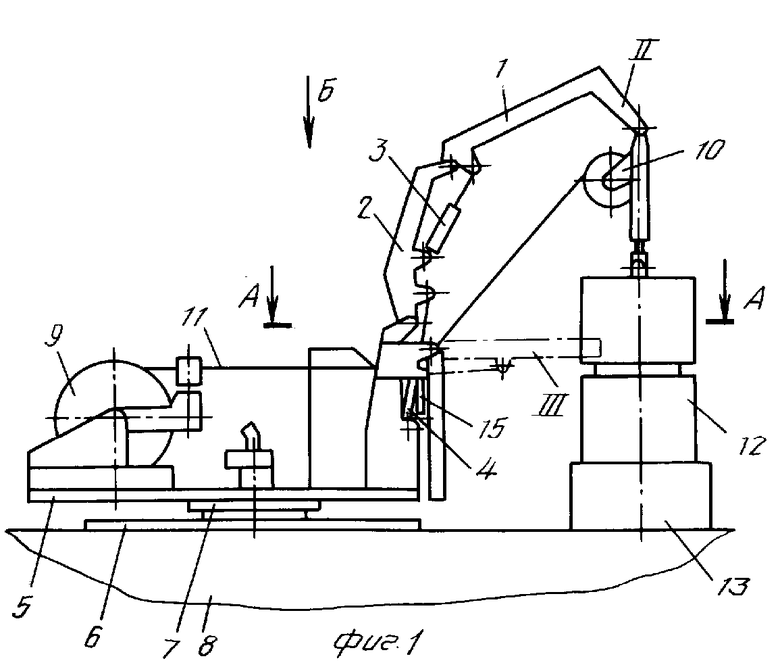
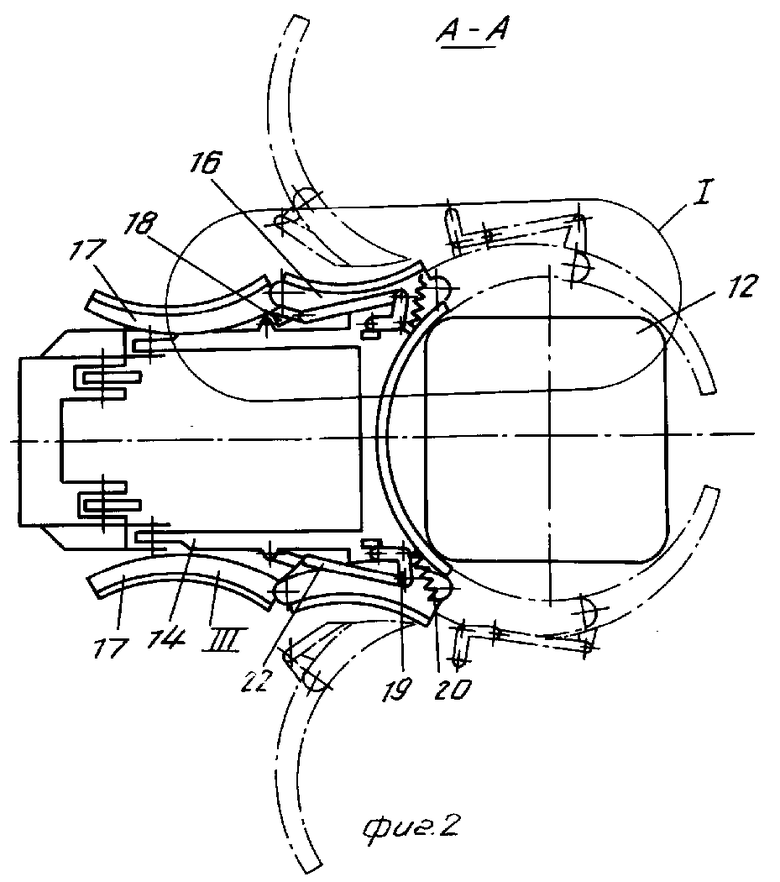
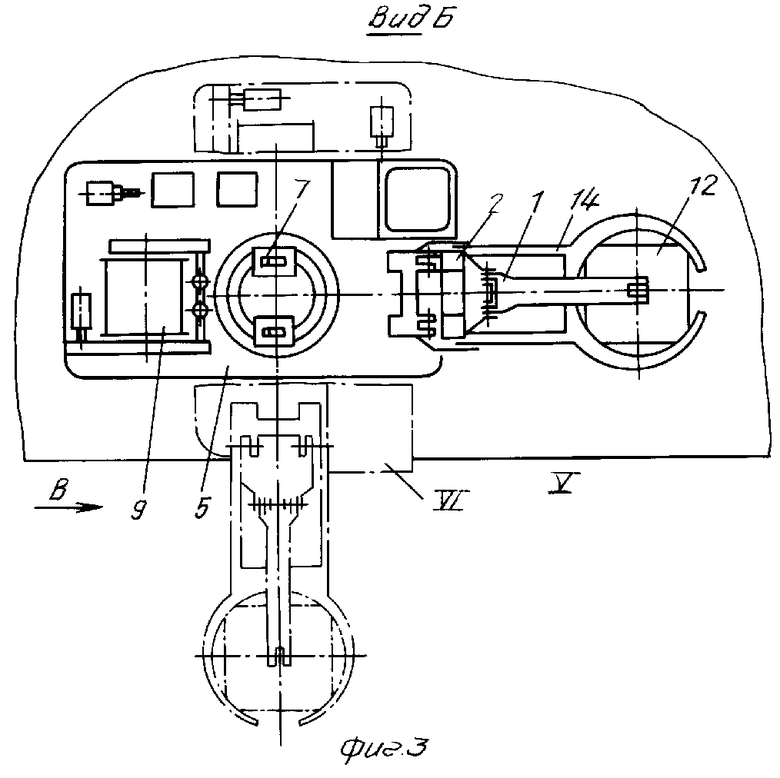
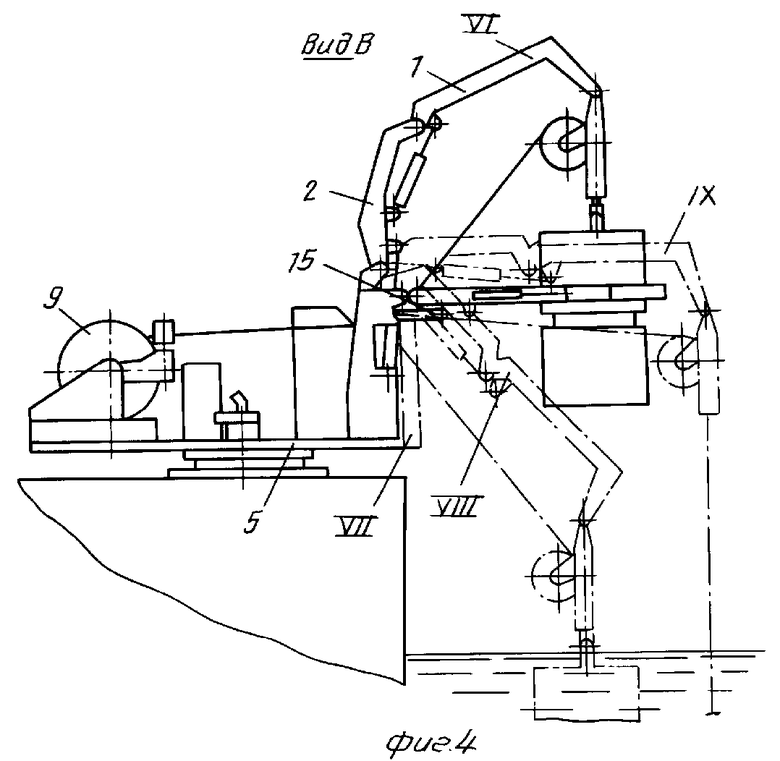
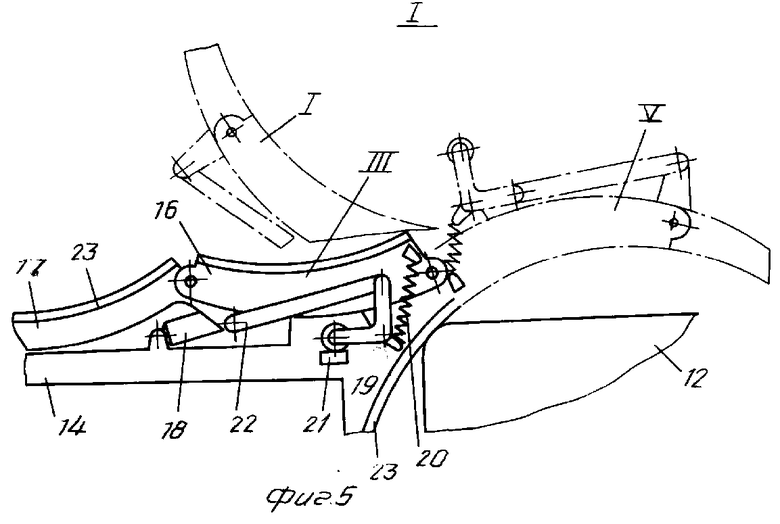
На фиг. 1 показано устройство, вид сбоку (основной линией изображено устройство в положении по-походному, пунктирной линией - промежуточные и рабочие положения устройства); на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - вид Б на фиг. 1; на фиг. 4 - вид В на фиг. 3; на фиг. 5 - узел I на фиг. 2.
Устройство содержит металлоконструкцию, которая состоит из верхнего 1 и нижнего 2 рычагов с приводами 3 и 4, шарнирно закрепленных на поворотной платформе 5. Поворотная платформа 5 соединена с основанием 6 приводным опорно-поворотным устройством 7. Основание 6 установлено на палубе судна 8. На поворотной платформе установлена грузовая лебедка 9. На ноке верхнего рычага 1 шарнирно закреплен блок шкива 10 с захватом. Кабель-трос 11 одним концом закреплен на грузовой лебедке 9, а вторым концом - на аппарате 12, расположенном рядом с устройством на кильблоке 13. На металлоконструкции шарнирно закреплены на горизонтальной оси подъемная рама 14 и гидроцилиндр 15 привода поворота рамы. На подъемной раме 14 шарнирно закреплены симметрично расположенные рычаги. Каждый рычаг выполнен из шарнирно связанных между собой корневой 16 и концевой 17 секций. Рабочие поверхности секций выполнены цилиндрическими. Корневая секция 16 шарнирно закреплена на подъемной раме 14 и связана с гидроцилиндром 18 привода поворота рычага, который также закреплен на подъемной раме 14. На корневой 16 секции шарнирно установлен угловой двуплечий рычаг 19. Рычаг 19 связан с пружиной 20, второй конец которой закреплен на корневой 16 секции. Свободное плечо рычага 19, на котором шарнирно закреплен каток 21, взаимодействует с подъемной рамой 14 в походном положении. На другом плече рычага 19 закреплен толкатель 22, второй конец которого закреплен на концевой секции 17. Рабочие поверхности подъемной рамы 14, корневой 16 и концевой 17 секций рычага снабжены упругими элементами 23.
Работает устройство следующим образом.
Последовательным включением приводов 4 и 3 нижний рычаг 2 и верхний 1 рычаги из положения по-походному переводится в крайнее положение. Грузовая лебедка 9 включается на выбирание и выбирает слабину в кабель-тросе 11. Включением привода 3 верхний рычаг 1 опускается и захватом захватывает шток аппарата 12 (положение I на фиг. 1). Включением привода 15, подъемная рама 14 переводится в горизонтальное положение (положение II на фиг. 1 и 2). Включением привода 18 корневая секция 16 поворачивается совместно с концевой секцией 17. Под действием пружины 20 угловой двуплечий рычаг 19 разворачивается и толкателем 22 разворачивает концевую секцию 17 относительно корневой секции 16 до занятия концевой секций рабочего положения (положение IV на фиг. 2 и 5). При дальнейшем движении корневой секции 16 корневая и концевая секции рычага образуют вокруг аппарата 12 ограждение, ограничивающее его перемещение (положение V).
Включением привода 3 верхний рычаг 1 приподнимает аппарат 12 над кильблоками 13. После включения привода поворотной платформы 7, поворотная платформа 5 с металлоконструкцией устройства и аппаратом 12 поворачивается из положения по-походному в рабочее положение (положение V I на фиг. 4).
Включением привода 18, корневая 16 и концевая 17 секции рычага открываются и при их подходе к положению IV свободным плечом рычага 19 они упираются в подъемную раму. Двуплечий рычаг 19 поворачивается и разворачивает концевую секцию (положение III). Включается привод 15, и подъемная рама 14 опускается (положение VIII).
Включением приводов 3 и 4 нижний 2 и верхний 1 рычаги совместно с блоком шкива 10 опускают агрегат 12 в воду (положение VII). Отдается захват, и аппарат 12 опускается на заданную глубину. После этого включением привода 4 нижний 4 и верхний 3 рычаги переводятся в положение IX. Подъем аппарата 12 осуществляется в обратной последовательности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СУДОВОЕ СПУСКО-ПОДЪЕМНОЕ УСТРОЙСТВО | 1992 |
|
RU2063360C1 |
| Спускоподъемное устройство для малогабаритных необитаемых подводных аппаратов и опускаемых гидроакустических антенн с судна-носителя | 2021 |
|
RU2760798C1 |
| Спуско-подъемное устройство для носителя буксируемых антенн | 1980 |
|
SU887350A1 |
| УСТРОЙСТВО ДЛЯ СПУСКА И ПОДЪЕМА ПЛАВАЮЩЕГО ОБЪЕКТА | 1991 |
|
RU2013290C1 |
| Судовое спуско-подъемное устройство для плавающих объектов | 1988 |
|
SU1569280A1 |
| Судовое спуско-подъемное устройство | 1976 |
|
SU600022A1 |
| ТРАВЕРСА СПУСКО-ПОДЪЕМНОГО УСТРОЙСТВА | 2015 |
|
RU2616452C2 |
| Судовое устройство для спуска и подъема плавсредств | 1990 |
|
SU1791272A1 |
| КОРМОВОЕ ВЫСАДОЧНОЕ УСТРОЙСТВО | 2015 |
|
RU2598681C1 |
| СИСТЕМА МОРСКИХ ТЕХНИЧЕСКИХ СРЕДСТВ, ВЗАИМОДЕЙСТВУЮЩИХ В ОТКРЫТОМ МОРЕ | 1996 |
|
RU2084372C1 |
Сущность изобретения: судовое спуско-подъемное устройство для подводных аппаратов содержит металлоконструкцию для выноса за борт подводного аппарата, установленную на ней посредством горизонтальной оси подъемную раму с центрирующим механизмом, выполненным с симметрично расположенными рычагами, а также приводы поворота этих рычагов и рамы. Каждый рычаг выполнен из шарнирно связанных между собой корневой и концевой секций с упругими элементами на рабочих поверхностях, выполненных цилиндрическими. 5 ил.
СУДОВОЕ СПУСКО-ПОДЪЕМНОЕ УСТРОЙСТВО ДЛЯ ПОДВОДНЫХ АППАРАТОВ, содержащее металлоконструкцию для выноса за борт подводного аппарата с захватом последнего и приводом, а также центрирующий механизм, выполненный с симметрично расположенными рычагами с упругими элементами на рабочих поверхностях, и гидроцилиндры привода поворота этих рычагов, отличающееся тем, что оно снабжено подъемной рамой, соединенной с металлоконструкцией посредством горизонтальной оси, и приводом поворота этой подъемной рамы с гидроцилиндром, связанным с последним, при этом каждый рычаг центрирующего механизма выполнен из шарнирно связанных корневой и концевой секций, рабочие поверхности которых выполнены цилиндрическими, причем корневая секция шарнирно связана с подъемной рамой и соответствующим гидроцилиндром привода поворота рычага, установленным на этой раме, при этом центрирующий механизм снабжен угловыми двуплечими рычагами, каждый из которых шарнирно установлен своей средней частью на корневой секции соответствующего рычага, подпружинен относительно ее и расположен с возможностью взаимодействия одним из своих плеч в положении по-походному с подъемной рамой, а другим своим плечом связан посредством толкателя с концевой секцией этого рычага.
