лы, выполненной в виде телескопической 45 вестным устройством для захвата плавучетрубы, состоящей из верхней трубы 23 и свободно сопрягающейся с ней нижней трубы 24 с возможностью свободного вертикального перемещения. Нижним концом нижняя труба 24 жестко присоединена
го объекта канат-проводник 28 штока 26 штокового устройства при подходе плавающего объекта 27 к судну 6 выбирается на борт судна, где соединяется клеван- том 29 с канатом-проводником 38. Грузок автоматическому захвату 25 общеизвест- 50 вой лебедкой 7 травятся грузовые кананой конструкции, в рабочем положении сопрягающемуся со штоковым устройством общеизвестной конструкции., Штоковое устройство состоит из штока 26, коренным концом шарнирно присоединенного к плавающему объекту 27 и вторым концом жестко соединенного с канатом-проводником 28, свободным концом жестко соединенным с клевантом 29 общеизвестной
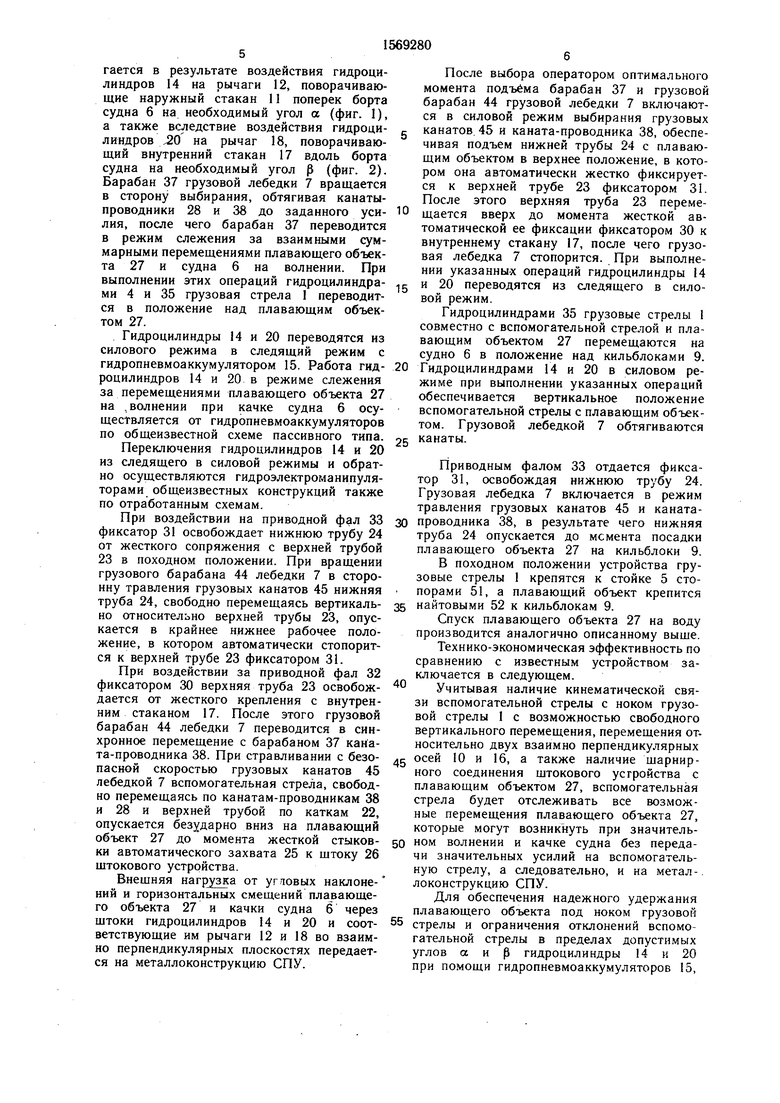
ты 45 до образования необходимой слабины, после чего грузовая стрела 1 совместно со вспомогательной стрелой и плавающим объектом 27 гидроцилиндрами 35 в силовом режиме выносятся в положение 55 за борт судна 6. При этом гидроцилиндрами 14 и 20, работающими в силовом режиме, обеспечивается вертикальное положение вспомогательной стрелы. Это достквестным устройством для захвата плавучего объекта канат-проводник 28 штока 26 штокового устройства при подходе плавающего объекта 27 к судну 6 выбирается на борт судна, где соединяется клеван- том 29 с канатом-проводником 38. Грузовой лебедкой 7 травятся грузовые канавой лебедкой 7 травятся грузовые канаты 45 до образования необходимой слабины, после чего грузовая стрела 1 совместно со вспомогательной стрелой и плавающим объектом 27 гидроцилиндрами 35 в силовом режиме выносятся в положение за борт судна 6. При этом гидроцилиндрами 14 и 20, работающими в силовом режиме, обеспечивается вертикальное положение вспомогательной стрелы. Это досткгается в результате воздействия гидроцилиндров 14 на рычаги 12, поворачивающие наружный стакан 11 поперек борта судна б на необходимый угол а (фиг. 1), а также вследствие воздействия гидроцилиндров J2Q на рычаг 18, поворачивающий внутренний стакан 17 вдоль борта судна на необходимый угол ($ (фиг. 2). Барабан 37 грузовой лебедки 7 вращается в сторону выбирания, обтягивая канаты- проводники 28 и 38 до заданного усилия, после чего барабан 37 переводится в режим слежения за взаимными суммарными перемещениями плавающего объекта 27 и судна б на волнении. При выполнении этих операций гидроцилиндрами 4 и 35 грузовая стрела 1 переводится в положение над плавающим объектом 27.
Гидроцилиндры 14 и 20 переводятся из силового режима в следящий режим с гидропневмоаккумулятором 15. Работа гидроцилиндров 14 и 20 в режиме слежения за перемещениями плавающего объекта 27 на , волнении при качке судна 6 осуществляется от гидропневмоаккумуляторов по общеизвестной схеме пассивного типа.
Переключения гидроцилиндров 14 и 20 из следящего в силовой режимы и обратно осуществляются гидроэлектроманипуля- торами общеизвестных конструкций также по отработанным схемам.
При воздействии на приводной фал 33 фиксатор 31 освобождает нижнюю трубу 24 от жесткого сопряжения с верхней трубой 23 в походном положении. При вращении грузового барабана 44 лебедки 7 в сторо- нну травления грузовых канатов 45 нижняя труба 24, свободно перемещаясь вертикально относительно верхней трубы 23, опускается в крайнее нижнее рабочее положение, в котором автоматически стопорится к верхней трубе 23 фиксатором 31.
При воздействии за приводной фал 32 фиксатором 30 верхняя труба 23 освобождается от жесткого крепления с внутренним стаканом 17. После этого грузовой барабан 44 лебедки 7 переводится в синхронное перемещение с барабаном 37 каната-проводника 38. При стравливании с безопасней скоростью грузовых канатов 45 лебедкой 7 вспомогательная стрела, свободно перемещаясь по канатам-проводникам 38 и 28 и верхней трубой по каткам 22, опускается безударно вниз на плавающий объект 27 до момента жесткой стыковки автоматического захвата 25 к штоку 26 штокового устройства.
Внешняя нагрузка от угяовых наклоне- ний и горизонтальных смещений плавающего объекта 27 и качки судна 6 через штоки гидроцилиндров 14 и 20 и соответствующие им рычаги 12 и 18 во взаимно перпендикулярных плоскостях передается на металлоконструкцию СПУ.
После выбора оператором оптимального момента подъема барабан 37 и грузовой барабан 44 грузовой лебедки 7 включаются в силовой режим выбирания грузовых
канатов 45 и каната-проводника 38, обеспечивая подъем нижней трубы 24 с плавающим объектом в верхнее положение, в котором она автоматически жестко фиксируется к верхней трубе 23 фиксатором 31. После этого верхняя труба 23 переме щается вверх до момента жесткой автоматической ее фиксации фиксатором 30 к внутреннему стакану 17, после чего грузовая лебедка 7 стопорится. При выполнении указанных операций гидроцилиндры 14
и 20 переводятся из следящего в силовой режим.
Гидроцилиндрами 35 грузовые стрелы 1 совместно с вспомогательной стрелой и плавающим объектом 27 перемещаются на судно 6 в положение над кильблоками 9.
0 Гидроцилиндрами 14 и 20 в силовом режиме при выполнении указанных операций обеспечивается вертикальное положение вспомогательной стрелы с плавающим объектом. Грузовой лебедкой 7 обтягиваются
5 канаты.
Приводным фалом 33 отдается фиксатор 31, освобождая нижнюю трубу 24. Грузовая лебедка 7 включается в режим травления грузовых канатов 45 и каната0 проводника 38, в результате чего нижняя труба 24 опускается до мсмента посадки плавающего объекта 27 на кильблоки 9. В походном положении устройства грузовые стрелы 1 крепятся к стойке 5 стопорами 51, а плавающий объект крепится
5 найтовыми 52 к кильблокам 9.
Спуск плавающего объекта 27 на воду производится аналогично описанному выше. Технико-экономическая эффективность по сравнению с известным устройством заключается в следующем.
0 Учитывая наличие кинематической связи вспомогательной стрелы с ноком грузовой стрелы 1 с возможностью свободного вертикального перемещения, перемещения от- носительно двух взаимно перпендикулярных
5 осей 10 и 16, а также наличие шарнирного соединения штокового устройства с плавающим объектом 27, вспомогательная стрела будет отслеживать все возможные перемещения плавающего объекта 27, которые могут возникнуть при значитель0 ном волнении и качке судна без передачи значительных усилий на вспомогательную стрелу, а следовательно, и на металлоконструкцию СПУ.
Для обеспечения надежного удержания плавающего объекта под ноком грузовой
5 стрелы и ограничения отклонений вспомо гательной стрелы в пределах допустимых углов аир гидроцилиндры 14 и 20 при помощи гидропневмоаккумуляторов 15,
настроенных на определенный диапазон давлений, с одной стороны ограничивают перемещение вспомогательной стрелы в двух взаимно перпендикулярных направлеиях, а с другой стороны ограничивают усилия, передаваемые от нее на грузовую стрелу, а следовательно, и на всю конструкцию СПУ. В результате этого повышается работоспособность узлов и механизмов устройства, а следовательно, и надежность устройства в целом.
Применение устройства при повышенном волнении моря обеспечивается в основном возможностью беспрепятственного вертикального перемещения вспомогательной стре лы относительно -нока грузовой стрелы 1 без передачи на нее значительных нагрузок.
Формула изобретения
2. Устройство по п. 1, отличающееся тем, что оно выполнено с концентрически расположенными стаканами, наружный из которых посредством горизонтальной оси с рычагом шарнирно связан с ноком
грузовой стрелы, а внутренний стакан 1. Судовое спуско-подъемное устройст-20 посредством горизонтальной оси с рычагом во для плавающих объектов, содержащеешарнирно связан с наружным стаканом, шарнирно установленную на палубе суд-при этом один из гидроцилиндров уста- на с возможностью поворота в вертикаль-новлен на грузовой- стреле и связан с ной плоскости грузовую стрелу со шки-рычагом оси наружного стакана, а другой вом на ее ноке и приводом ее пово-25 ГИДР°ЧИЛИНДР установлен на наружном ста- рота, кинематически связанную с ноком этойкане и связан с рычагом оси внутреннего стрелы вспомогательную телескопическуюстакана, причем оси стаканов взаимно пер- стрелу, на ходовом конце которой закреп-пендикулярны, а вспомогательная стрела ус- лен захват, через который проходит трос-тановлена во внутреннем стакане с возмож- проводник, а также грузовой канат, про-ностью продольного перемещения.
5
пущенный через упомянутый шкив и связанный одним концом с ходовым концом вспомогательной стрелы, а другим - с грузовой лебедкой, отличающееся тем, что, с целью повышения надежности использования за счет, снижения нагрузок на металлоконструкции, вспомогательная стрела установлена с возможностью поворота в двух взаимно перпендикулярных вертикальных плоскостях посредством гидроци- линдров, связанных с гидроаккумуляторами, которыми снабжено устройство, при этом устройство снабжено стопорами для фиксации вспомогательной стрелы в походном и рабочем положениях.
2. Устройство по п. 1, отличающееся тем, что оно выполнено с концентрически расположенными стаканами, наружный из которых посредством горизонтальной оси с рычагом шарнирно связан с ноком
грузовой стрелы, а внутренний стакан 0 посредством горизонтальной оси с рычагом шарнирно связан с наружным стаканом, при этом один из гидроцилиндров уста- новлен на грузовой- стреле и связан с рычагом оси наружного стакана, а другой 5 ГИДР°ЧИЛИНДР установлен на наружном ста- кане и связан с рычагом оси внутреннего стакана, причем оси стаканов взаимно пер- пендикулярны, а вспомогательная стрела ус- тановлена во внутреннем стакане с возмож- ностью продольного перемещения.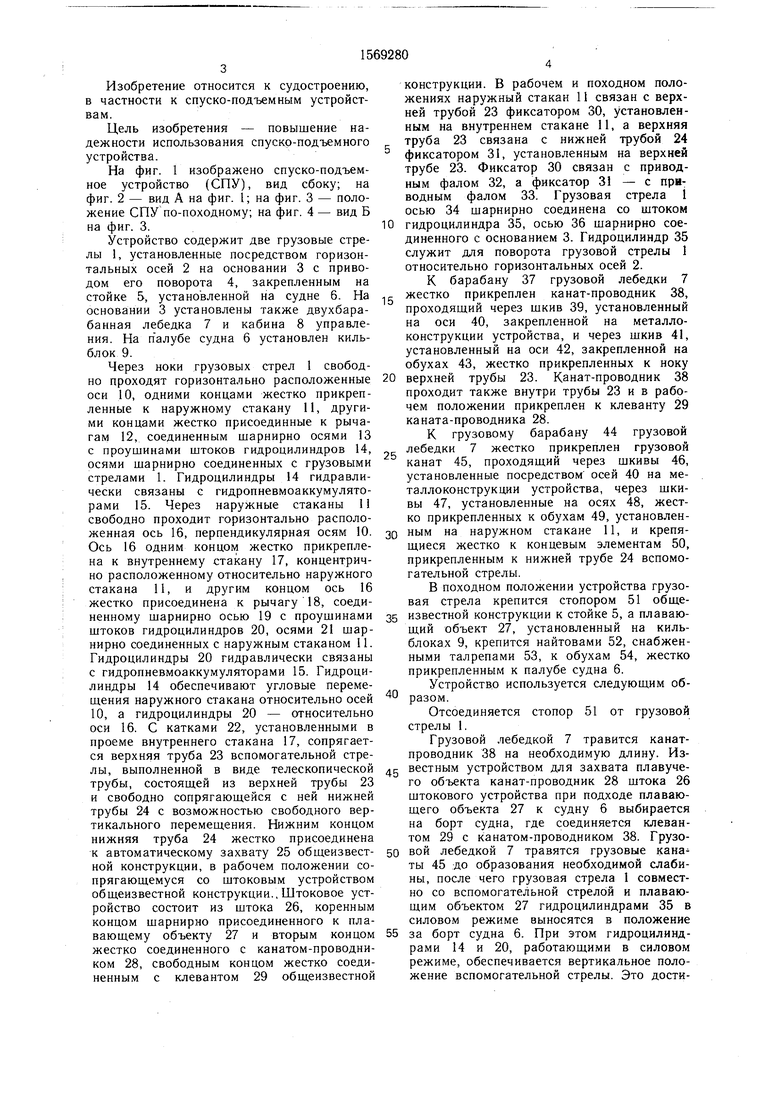
| название | год | авторы | номер документа |
|---|---|---|---|
| Спуско-подъемное устройство для плавсредств | 1985 |
|
SU1291490A1 |
| Судовое спускоподъемное устройство | 1986 |
|
SU1400945A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА СУДОВОГО КРАНА | 2003 |
|
RU2262464C2 |
| ТРАВЕРСА СПУСКО-ПОДЪЕМНОГО УСТРОЙСТВА | 2015 |
|
RU2616452C2 |
| Судовое устройство для спуска и подъема изделий | 1983 |
|
SU1093611A1 |
| Спуско-подъемное устройство для плавсредств | 1977 |
|
SU679482A1 |
| Устройство для пересадки людей с судна на судно в условиях качки | 1975 |
|
SU695891A1 |
| УСТРОЙСТВО ДЛЯ СПУСКА И ПОДЪЕМА ПЛАВАЮЩЕГО ОБЪЕКТА | 1991 |
|
RU2013290C1 |
| Заваливающийся кильблок | 1979 |
|
SU839840A2 |
| Система для безударной передачи гРузА C СудНА HA СудНО B уСлОВияХВОлНЕНия МОРя | 1979 |
|
SU816867A1 |

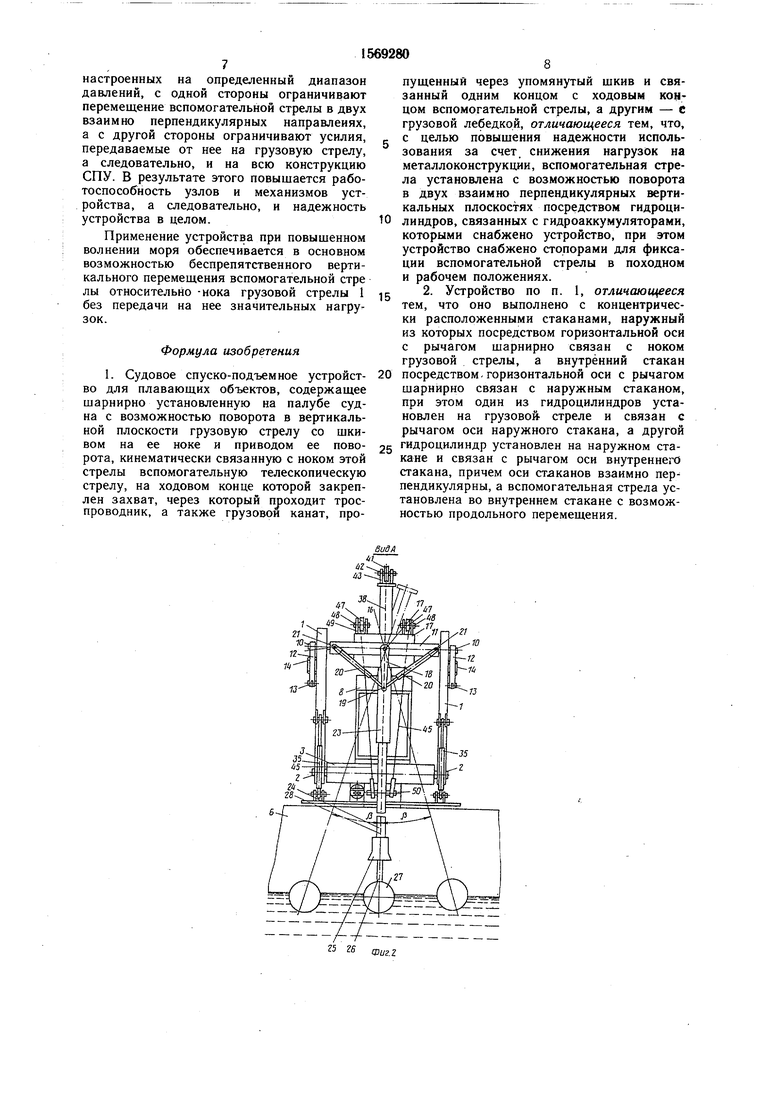
Изобретение относится к спуско-подъемному устройству. Цель изобретения - повышение надежности использования спуско-подъемного устройства. Спуско-подъемное устройство содержит шарнирно установленные на палубе судна 6 посредством поворотного основания 3 грузовые стрелы 1 со шкивами, снабженные приводным гидроцилиндром 35, и кинематически связанную с этими стрелами вспомогательную стрелу 23 телескопической конструкции, на ходовом конце которой закреплен захват 25 с проходящим через него тросом, а также грузовой канат 45, заведенный на судовую лебедку 7. Устройство снабжено гидроцилиндрами 14 и 20, сообщенными с гидроаккумуляторами 15. Привод горизонтального поворота основания грузовых стрел выполнен в виде гидроцилиндра 4. Вспомогательная стрела 23 установлена с возможностью поворота в двух взаимно перпендикулярных вертикальных плоскостях посредством дополнительных гидроцилиндров 14 и 20. Грузовой канат 45 ходовым концом связан с нижним элементом вспомогательной стрелы 23, коренной конец этого каната запасован на шкив грузовой стрелы. Устройство снабжено стопорами для фиксации вспомогательной стрелы 23 в походном и рабочем положениях. 1 з.п.ф-лы, 4 ил.
21
175 ге Фиг Z
21
4J
| Спуско-подъемное устройство для плавсредств | 1977 |
|
SU679482A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
