Изобретение относится к области судостроения, к специальным устройствам для спуска и подъема плавающих объектов в условиях волнения моря.
В настоящее время морские суда оборудуются специальными спуско-подъемными устройствами для обслуживания различных плавающих объектов-катеров, обитаемых и необитаемых аппаратов как с одной точкой подвеса, так и с двумя.
При наличии вертикальной, килевой и бортовой качки судна и плавающего объекта в момент отрыва плавающего объекта с двумя точками подвеса от воды натяжение ветвей подъемных канатов различное. Одна из подъемных ветвей канатов может оказаться ненагруженной, а сами канаты - приспособленными. При последующем взаимном перемещении судна и плавающего объекта на волне к ненагруженным канатам прилагается практически мгновенно нагрузка от массы объекта, вызывая значительные динамические усилия в элементах спуско-подъемного устройства. С целью уменьшения динамических усилий устройства оборудуются механизмами для выборки слабины в подъемных канатах при качке судна и объекта на волне.
Примером спуско-подъемного устройства для плавающих объектов может служить устройство, которое состоит из механизма выноса катера за борт, выполненного в виде рычажно-параллелограммной системы, включающей в себя стрелы, станины, платформу, оттяжки, механизм выноса оборудования гидроцилиндровым приводом вываливания-заваливания. Устройство включает в себя также механизм подъема в виде грузовой автоматической следящей лебедки, трособлочную систему, состоящую из трехстропных двухветвенных тросовых проводок, каждая из которых связана с системой демпфирования, и трособлочную систему канатов-проводников. Выборку слабины в ветвях подъемных канатов при килевой качке судна и плавающего объекта устройство осуществляет системой демпфирования. Система демпфирования состоит из подвижного корпуса с пружинными демпферами и шкивами, через которые пропущены ветви грузовых канатов. Подвижный корпус имеет возможность перемещаться по направляющим в сторону нагруженной ветви каната, выбирая при этом слабину в ненагруженной ветви. Подвижный корпус оборудован механизмом стопорения в виде двух гидроцилиндров, сообщенных между собой через двухпозиционный золотник, который разобщает гидроцилиндры и тем самым фиксирует подвижный корпус и в момент включения грузовой лебедки на подъем.
Недостаток данного устройства - невысокая надежность ввиду сложной конструкции системы демпфирования, включающей в себя гидросистему стопорения и электросистему управления, связанную с системой управления грузовой лебедкой. Необходимы значительные затраты времени на техническое обслуживание системы демпфирования. Конструктивно система демпфирования выполнена таким образом, что способна выбирать слабину в ветвях канатной проводки только при килевой качке. При бортовой качке подъемные канаты трехстропной проводки в каждой ветви также могут нагружаться неодинаково, причем в отдельных канатах может появляться слабина. Следовательно, такая система демпфирования не решает задачу выборки слабины во всех шести подъемных канатах при бортовой и килевой качке. Недостатком устройства является также значительная масса, обусловленная наличием гидросистемы и электросистемы демпфирующего устройства.
Цель изобретения - повышение надежности работы за счет обеспечения слежения за килевой и бортовой качкой плавающего объекта, уменьшение трудоемкости обслуживания и массы устройства.
Указанная цель достигается тем, что в устройстве, содержащем металлоконструкцию выноса объекта за борт с приводом, две грузовые подвески, две трехстропные канатные проводки, пропущенные через шкивы подвесок и металлоконструкции и связанные с подъемным механизмом и системой демпфирования, канатные проводки связаны с одним подъемным механизмом, например лебедкой, а каждый канат канатной проводки связан через шкив с компенсатором. Компенсатор выполнен в виде трубчатых направляющих, внутри которых установлены штоки со шкивами, каждый шток взаимодействует с пружинной системой переменной жесткости. С целью удобства монтажа компенсатор смонтирован в один блок, установленный на металлоконструкции выноса объекта за борт.
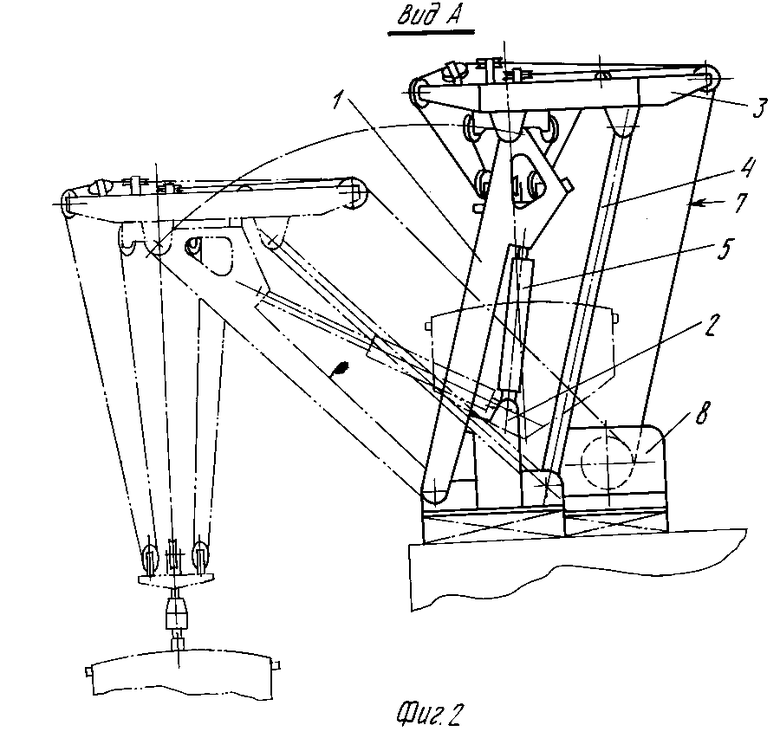
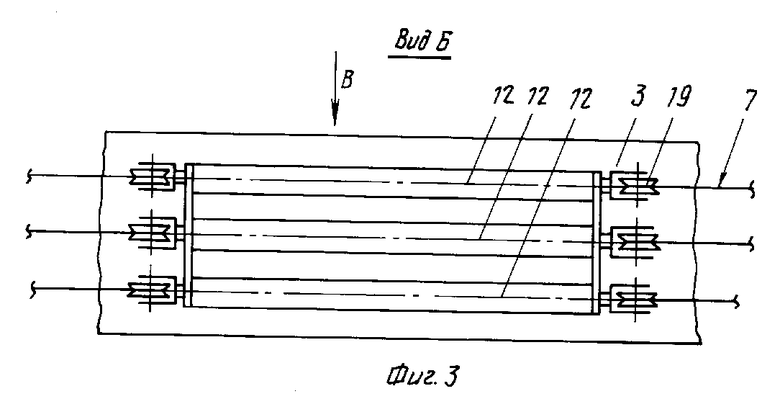
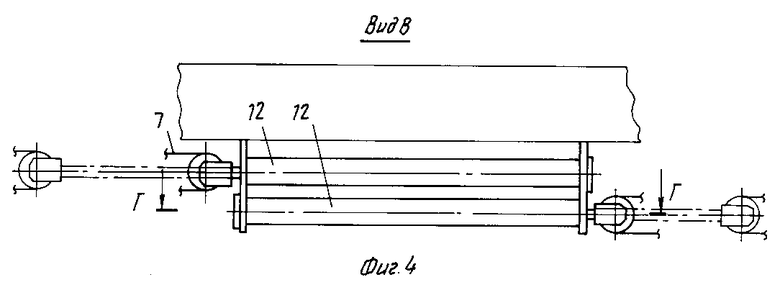
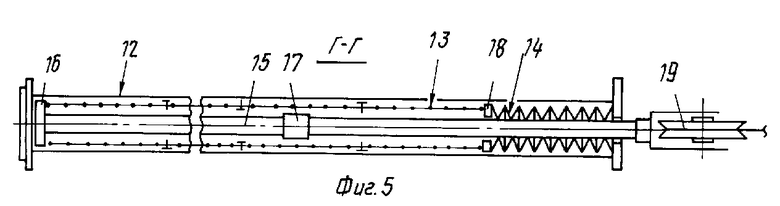
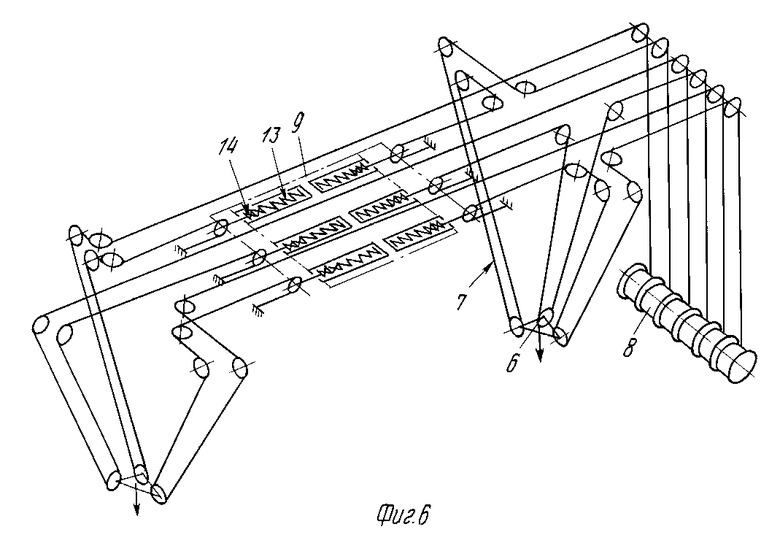
На фиг. 1 показано устройство, вид со стороны борта; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 1; на фиг. 4 - вид В на фиг. 3; на фиг. 5 - сечение Г-Г на фиг. 4; на фиг. 6 - схема канатной проводки устройства.
Устройство для спуска и подъема плавающих объектов состоит из металлоконструкции выноса объекта за борт в виде шарнирно-параллелограммной рычажной системы, включающей в себя стрелы 1, шарнирно связанные со станинами 2 и платформой 3, а также оттяжки 4. Приводом металлоконструкции выноса служат гидроцилиндры 5. Грузовые подвески 6 оборудованы тремя шкивами каждая, через которые проведены подъемные канаты 7. Подъемные канаты 7 трехстропной канатной проводки пропущены также через шкивы металлоконструкции выноса объекта за борт и связаны с одной стороны с подъемным механизмом, например грузовой лебедкой 8 с шестисекционным барабаном, а с другой - с компенсатором 9. Канаты-проводники 10 коренными концами закреплены на барабанах лебедок 11, а ходовые их концы закреплены на подъемных штоках, установленных на объекте. Компенсатор 9 состоит из трубчатых направляющих 12, в каждой из которых смонтирована пружинная система переменной жесткости, состоящая из винтовых пружин 13 сравнительно малой жесткости и тарельчатых пружин 14 большой жесткости, и шток 15 с концевым 16 и промежуточным 17 упорами. Концевой упор 16 взаимодействует с винтовыми пружинами 13, а промежуточный посредством плавающей втулки 18 - с тарельчатыми пружинами 14 в конце хода винтовых пружин. Свободный конец штока заканчивается шкивом 19, через который пропущен подъемный канат 7. Коренной конец каждого каната 7 закреплен на металлоконструкции платформы к кронштейну 20. Трубчатые направляющие 12 скомпонованы в один блок компенсатора 9.
Работает устройство следующим образом.
С помощью гидроцилиндров 5 металлоконструкция выноса вываливается за борт судна. Включением лебедок 11 на травление канаты-проводники 10 подаются на плавающий объект и закрепляются в его подъемных узлах. Лебедки 11 включаются на выбирание канатов-проводников. После выборки слабины в канатах-проводниках лебедки 11 входят в автоматический режим работы, создавая постоянное натяжение в канатах. Включением грузовой лебедки 8 на травление грузовые подвески 6 с автоматическими захватами опускаются по канатам-проводникам до автоматического соединения захватов с подъемными штоками объекта. После застропки объекта лебедка 8 включается на выбирание слабины в грузовых канатах и затем входят в автоматический режим работы, создавая натяжение в подъемных канатах при вертикальном перемещении объекта на волне. При работе в автоматическом режиме слежения за положением объекта на волне лебедка 8 создает сравнительно небольшое усилие, достаточное только для подъема и удержания холостых грузовых подвесок 6 и сжатия винтовых пружин 13 компенсатора 9. Однако этого усилия недостаточно для сжатия тарельчатых пружин 14 большой жесткости.
При чисто вертикальной качке объекта и судна выборка слабины во всех ветвях подъемных канатов и в каждом канате, в частности, осуществляется только с помощью лебедки 8. При работе в автоматическом режиме скорость выбирания канатов лебедкой не ниже скорости вертикального перемещения объекта вверх. При наличии всех видов качки - вертикальной, килевой и бортовой - все подъемные канаты имеют различную длину. При килевой качке, например, носовая и кормовая грузовые подвески перемещаются по вертикали в различных направлениях, вследствие чего одна ветвь канатов удлиняется, а вторая укорачивается. Появляющуюся при этом слабину выбирают компенсатор слабины грузовых канатов 9. То же происходит и при бортовой качке объекта и судна. Отклонение оси грузовых подвесок от вертикали при бортовой качке также вызывает изменение длин подъемных канатов. В канатах, длина которых при этом уменьшается, слабина не появляется, т. к. ее выбирает компенсатор при разжатии винтовых пружин 13 и втягивании в направляющую 12 штока 15 со шкивом 19. Включением грузовой лебедки 8 на подъем производится отрыв объекта от воды. Возникающие при этом динамические нагрузки гасятся тарельчатыми пружинами 14 большой жесткости компенсатора 9. После того, как объект поднят к платформе, с помощью гидроцилиндров 5 металлоконструкция выноса заваливается в положение по-походному. Спуск объекта на воду производится в обратной последовательности.
Преимущества предлагаемого технического решения по сравнению с прототипом заключаются в том, что при проведении спуско-подъемных операций в подъемных канатах не возникает слабины при всех видах качки судна и объекта на волне, и тем самым исключаются динамические рывки в грузовых канатах. Повышается надежность работы устройства, снижаются масса и трудоемкость обслуживания в связи с введением в конструкцию одной грузовой лебедки вместо двух.
| название | год | авторы | номер документа |
|---|---|---|---|
| СУДОВОЕ СПУСКО-ПОДЪЕМНОЕ УСТРОЙСТВО ДЛЯ ПОДВОДНЫХ АППАРАТОВ | 1991 |
|
RU2013291C1 |
| Судовое спуско-подъемное устройство для плавающих объектов | 1988 |
|
SU1569280A1 |
| СУДОВОЕ УСТРОЙСТВО ДЛЯ СПУСКА И ПОДЪЕМА КАТЕРОВ | 1969 |
|
SU247061A1 |
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 1995 |
|
RU2114756C1 |
| Судовое спуско-подъемное устройство | 1983 |
|
SU1110715A1 |
| ТРАВЕРСА СПУСКО-ПОДЪЕМНОГО УСТРОЙСТВА | 2015 |
|
RU2616452C2 |
| СИСТЕМА МОРСКИХ ТЕХНИЧЕСКИХ СРЕДСТВ, ВЗАИМОДЕЙСТВУЮЩИХ В ОТКРЫТОМ МОРЕ | 1996 |
|
RU2084372C1 |
| Устройство для спуска и подъема большегрузных катеров и других плавающих объектов | 1972 |
|
SU500114A1 |
| СУДОВОЕ СПУСКО-ПОДЪЕМНОЕ УСТРОЙСТВО | 1992 |
|
RU2063360C1 |
| УСТРОЙСТВО для ЗАСТРОПОВКИ ПЛАВАЮЩИХ ОБЪЕКТОВ | 1970 |
|
SU278446A1 |
Сущность изобретения: устройство содержит поворотные стрелы 1, станины 2, платформу 3, грузовые канаты 7, грузовую автоматическую лебедку 8 с шестисекционным барабаном. На платформе 3 установлен компенсатор 9, состоящий из корпуса, в котором смонтированы трубчатые направляющие. Внутри трубчатых направляющих смонтированы пружинные системы переменной жескости, с которыми взаимодействуют штоки. Свободные концы штоков заканчиваются шкивами 19. Каждый грузовой канат 7 запасован через шкив 19 и взаимодействует с пружинной системой переменной жесткости. 6 ил.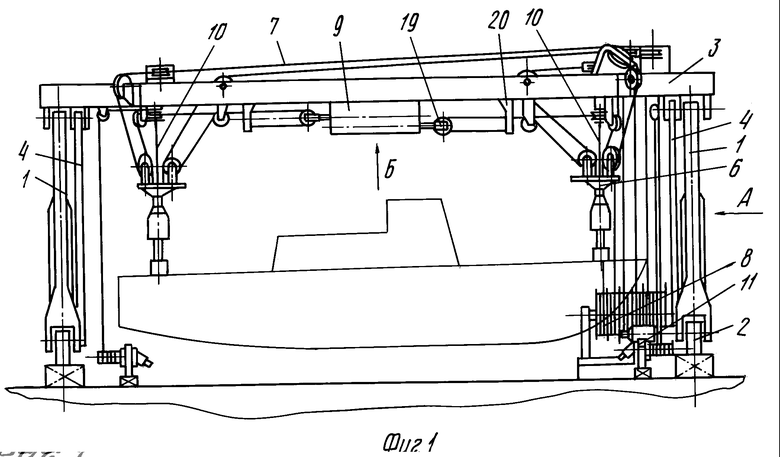
УСТРОЙСТВО ДЛЯ СПУСКА И ПОДЪЕМА ПЛАВАЮЩЕГО ОБЪЕКТА, содержащее металлоконструкцию для выноса плавающего объекта с приводом ее перемещения, две грузовые подвески с отводными шкивами, две трехстропные проводки, связанные с грузовой лебедкой, и установленный на упомянутой металлоконструкции компенсатор, выполненный со шкивами, а также с корпусом, в трубчатых направляющих которого подвижно установлены штоки, связанные с блоками пружин, при этом каждый строп упомянутых трехстропных проводок запасован в соответствующие шкивы, установленные на упомянутой металлоконструкции, отводной шкив грузовой подвески и соответствующий шкив конпенсатора, отличающееся тем, что упомянутый компенсатор выполнен с дополнительными трубчатыми направляющими с подвижно расположенными в них штоками и блоками пружин, при этом каждый из штоков связан с соответствующим шкивом этого компенсатора, а каждый из упомянутых блоков пружин выполнен из пружин с различной жесткостью.
