Изобретение может быть использовано в судостроении для установки на специальных судах для подъема тяжелых грузов.
Наиболее близким к предлагаемому изобретению является устройство для формирования подъема и опускания буровой колонны, установленное на судне для глубоководного бурения [1] , включающее устройства для формирования буровой колонны, проходящей через прорезь в судне, подъемный механизм и компенсатор вертикальных перемещений буровой колонны, состоящий из закрепленного на судне корпуса и кинематически связанного с буровой колонной штока с поршнем, образующих совместно с корпусом две рабочие камеры, одна из которых соединена с пневмогидроаккумулятором, другая - с атмосферой. Для возможности активного управления компенсатором посредством изменения давления в пневмогидроаккумуляторе используется гидроцилиндр, шток которого связан с поршнем пневмогидроаккумулятора, а сам цилиндр гидравлически связан с насосом. При волнении корпус компенсатора перемещается относительно неподвижного штока, вытесняя рабочую жидкость из рабочей камеры в пневмогидроаккумулятор, вследствие значительного объема которого в системе сохраняется практически постоянное давление рабочей жидкости.
В качестве прототипа выбрано устройство для подъема сверхтяжелых грузов [2] , состоящее из грузозахватного устройства, соединенного с судном посредством грузонесущей связи, проходящей через прорезь в судне и связанной с грузоподъемным механизмом, устройства формирования грузонесущей связи и компенсатора вертикальной качки, состоящего из пневмогидроаккумулятора, корпуса, вертикально закрепленного на судне, и кинематически связанного с грузонесущей связью плунжера, образующего совместно с корпусом рабочую камеру, гидравлически связанную с пневмогидроаккумулятором.
Принцип работы такого устройства такой же как и аналога - при качке рабочая жидкость из рабочей камеры вытесняется в пневмогидроаккумулятор большого объема, благодаря чему давление в системе изменяется незначительно.
Недостатком прототипа является отсутствие защиты грузонесущей связи от динамических нагрузок, от возможности возрастания амплитуд вертикальных колебаний, от возникновения явления резонанса в опасных зонах.
Целью изобретения является улучшение эксплуатационных характеристик устройства и повышение надежности за счет уменьшения динамических нагрузок, снижения амплитуд вертикальных колебаний грузонесущей связи, а также уменьшения вероятности возникновения аварийных ситуаций путем введения управляемого прохода резонансно опасных зон работы.
Цель достигается тем, что в судовом устройстве для подъема тяжелых грузов с больших глубин, состоящем из грузозахватного устройства, соединенного с судном посредством грузонесущей связи, проходящей через прорезь в судне и связанной с подъемным механизмом, устройства формирования грузонесущей связи и компенсатора вертикальных перемещений грузонесущей связи, состоящего из пневмогидроаккумулятора, корпуса, вертикально закрепленного на судне и кинематически связанного с грузонесущей связью штока с поршнем, образующих совместно с корпусом верхнюю рабочую камеру, и нижнюю соединенную с пневмогидроаккумулятором, компенсатор вертикальных перемещений грузонесущей связи снабжен четырехходовым и двумя двухходовыми двухпозиционными электромагнитами-распределителями, двумя реле давления, четырьмя обратными клапанами, предохранительным клапаном, и насосом-мотором с электроприводом, при этом рабочие камеры компенсатора связаны с входами четырехходового распределителя, один выход которого связан со сливом в бак, другой - с пневмогидроаккумулятором, а верхняя рабочая камера через обратный клапан соединена со сливом в бак и через другой обратный клапан - с входом двухходового распределителя, выходом третьего обратного клапана и входом второго реле давления, электрически связанного с электромагнитом упомянутого двухходового распределителя, причем нижняя рабочая камера соединена с входом второго двухходового распределителя, входом третьего обратного клапана и входом второго реле давления, электрически связанного с электромагнитом второго двухходового распределителя, первым реле давления и через переключатель режима работы компенсатора с электромагнитом четырехходового распределителя и с источником электропитания, а выходы двухходовых распределителей связаны между собой, с пневмогидроаккумулятором, а также с входом предохранительного клапана и выходом четвертого обратного клапана, вход и выход которых связаны с входом насоса-мотора, выход которого связан со сливом в бак.
На основании выполненного анализа известных технических решений можно сделать вывод, что заявляемое техническое решение обладает существенными отличиями, приводящими к новому положительному эффекту - уменьшению динамических нагрузок на устройство, снижению амплитуд вертикальных колебаний грузонесущей связи, уменьшению вероятности возникновения аварийных ситуаций путем введения управляемого прохода резонансно-опасных зон работы.
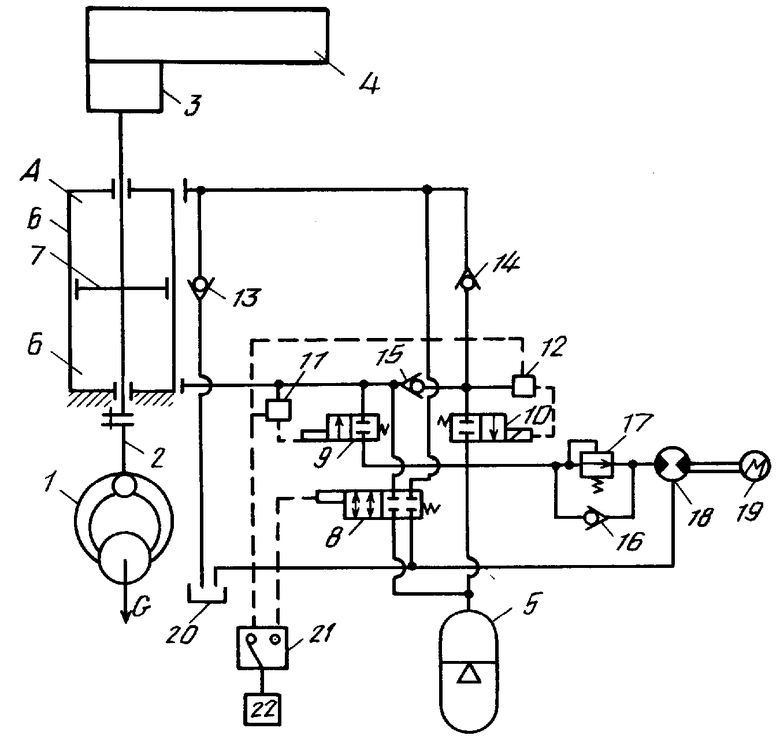
На чертеже изображена схема судового устройства для подъема с больших глубин тяжелых грузов.
Судовое устройство для подъема тяжелых грузов с больших глубин состоит из грузозахватного устройства 1, соединенного с судном посредством грузонесущей связи 2, проходящей через прорезь в судне и связанной с подъемным механизмом 3, устройства 4 формирования грузонесущей связи и компенсатора вертикальных перемещений грузонесущей связи, состоящего из пневмогидроаккумулятора 5, корпуса 6, вертикально закрепленного на судне, и кинематически связанного с грузонесущей связью штока с поршнем 7, образующих совместно с корпусом 6 верхнюю А и нижнюю Б рабочие камеры. Компенсатор снабжен четырехходовым 8 и двухходовыми 9, 10 двухпозиционными электромагнитами распределителями, реле 11, 12 давления, обратными клапанами 13-16, предохранительным клапаном 17 и насосом-мотором 18 с электроприводом 19. Рабочие камеры А и Б связаны с входами распределителя 8, один выход которого связан со сливом в бак 20, другой - с пневмогидроаккумулятором 5. Рабочая камера А соединена через обратный клапан 13 со сливом в бак 20 и через обратный клапан 14 с входом распределителя 10, выходом обратного клапана 15 и входом реле 12 давления, электрически связанного с электромагнитом распределителя 10. Рабочая камера Б соединена с входом распределителя 9, входом обратного клапана 15 и входом реле 11 давления, электрически связанного с электромагнитом распределителя 9, реле 12 давления и через переключатель 21 режима работы компенсатора с электромагнитом распределителя 8 и источником 22 электропитания.
Выходы распределителей 9, 10 связаны между собой, с пневмогидроаккумулятором 5, а также с входом предохранительного клапана 17 и выходом обратного клапана 16, вход и выход которых связаны с входом насоса-мотора 18, выход которого связан со сливом в бак.
Работа устройства для подъема грузов осуществляется в три этапа: на первом этапе происходит формирование грузонесущей связи 2 при помощи устройства 4 и опускание ее совместно с грузозахватным устройством 1 на глубину при помощи подъемного механизма 3; на втором этапе производится подведение грузозахватного устройства 1 к грузу G и захват его; на третьем этапе - подъем груза G совместно с грузонесущей связью 2 при помощи подъемного механизма 3.
Требования, предъявляемые к компенсации вертикальных перемещений, на различных этапах разные. На этапах подъема и опускания груза задача компенсатора - предохранить грузонесущую связь от динамических нагрузок, способных ее деформировать или разрушить, а также предотвратить возможные вертикальные колебания системы с большой амплитудой и снизить вероятность возникновения резонанса. На этапе подвода грузозахватного устройства к грузу и его захвата компенсатор должен сократить до минимума вертикальные перемещения грузозахватного устройства.
Предлагаемое устройство обеспечивает два режима работы компенсатора: обычный, подобный режиму работы аналога, и прототипа, направленный на ограничение вертикальных перемещений грузонесущей связи, и второй, обеспечивающий компенсацию по максимально допустимым напряжениям в грузонесущей связи, обеспечивающий в то же время ограничение амплитуд вертикальных колебаний и вероятность возникновения резонанса.
Настройка и работа устройства осуществляются следующим образом.
Первоначально производится настройка реле 11 и 12 давлений, а также предохранительного клапана 17. Реле 11 давления настраивается на давление Ро, определяемое соотношением:
P0=  [н/м2] . где G - вес груза [н] ;
[н/м2] . где G - вес груза [н] ;
Q - вес грузонесущей связи [н] ;
F - рабочая площадь поршня компенсатора [м2] .
Реле 12 давления настраивается на величину давления [P] , определяемую по формуле:
[P] =  [нм2] где [σ ] - предельно допускаемые напряжения в материале грузонесущей связи [нм2] ;
[нм2] где [σ ] - предельно допускаемые напряжения в материале грузонесущей связи [нм2] ;
F - минимальная площадь наиболее опасного сечения грузонесущей связи [м2] ;
n - запас прочности.
Рабочий объем пневмогидроаккумулятора 5 подбирается таким образом, чтобы при работе компенсатора давление в рабочей камере поддерживалось равным Ро с точностью 3-5% .
Давление подрыва предохранительного клапана устанавливается в пределах Рn = 1,05-1,1 Рo .
Режим работы компенсатора определяется положением переключателя 21, который при режиме компенсации по вертикальным перемещениям соединяет источник 22 электропитания с электромагнитным распределителем 8, который переключается и соединяет рабочую камеру А с баком 20, а рабочую камеру Б - с пневмогидроаккумулятором 5. При вертикальном перемещении судна, например, вверх, корпус 6 перемещается относительно штока с поршнем 7, жидкость из рабочей камеры Б вытесняется в пневмогидроаккумулятор 5, а жидкость из бака 20 поступает в рабочую камеру А. Компенсатор работает в режиме, аналогичном режиму аналога и прототипа.
Для перехода на режим компенсации по предельной нагрузке в грузонесущей связи переключатель 21 переключается таким образом, что источник 22 питания отключается от электромагнита распределителя 8 и подключается к реле 11,12 давления. Распределитель 8 возвращается в исходное положение и перекрывает прямую связь рабочих камер А и Б с баком 20 и пневмоаккумулятором 5 соответственно.
При вертикальном перемещении судна, например вверх, перемещается и связанный с ним корпус 6 компенсатора. Вследствие инерционности системы грузонесущая связь - груз на штоке с поршнем 7 компенсатора возникают дополнительные усилия, вызывающие повышение давления рабочей жидкости в камере Б компенсатора. До тех пор, пока величина давления в камере Б не превысит значения [P] , определяемого настройкой реле 12 давления, шток с поршнем 7 останется неподвижным относительно корпуса 6 - компенсатор в работу не включается. Как только значение давления рабочей жидкости достигнет величины [P] , реле 12 давления срабатывает и подключает электромагнит распределителя 10 к источнику 22 электропитания, распределитель 10 переключится в положение, при котором рабочая жидкость из камеры Б через обратный клапан 15 поступит в пневмогидроаккумулятор 5. Корпус 6 переместится относительно штока с поршнем 7 вверх, при этом рабочая жидкость из бака 20 через обpатный клапан 13 поступает в рабочую камеру А компенсатора. При перемещении судна вниз повышается давление в рабочей камере А компенсатора, который при давлении в камере менее [P] в работу не включается. В случае повышения давления в камере А до величины [P] срабатывает реле 12 давления и распределитель 10 соединяет камеру А через обратный клапан 14 с пневмогидроаккумулятором 5. Рабочая жидкость из камеры А будет поступать в пневмогидроаккумулятор 5 до тех пор, пока величина давления в камере не снизится до величины менее [P] , в это время объем камеры Б увеличивается, что вызывает падения давления. При уменьшении величины давления в камере Б ниже значения Ро реле 11 давления срабатывает и подключает источник 22 питания к электромагниту распределителя 9, который переключается таким образом, что рабочая жидкость из пневмогидроаккумулятора 5 начинает поступать в камеру Б под давлением Ро.
В процессе работы компенсатора рабочая жидкость из бака 20 поступает в камеру А, откуда под давлением Р в пневмогидроаккумулятор 5, в котором вследствие этого возрастает давление. При достижении давления в аккумуляторе 5 величины (1,05 + 1,1) Ро, определяемой настройкой предохранительного клапана 17, он перепускает рабочую жидкость в насос-мотор 18, который начинает работать в моторном режиме, вращая электропривод 19, работающий в генераторном режиме и отдающий энергию в судовую электросеть. Рабочая жидкость из насоса-мотора 18 поступает в бак 20.
Технико-экономический эффект предлагаемого изобретения заключается в улучшении эксплуатационных характеристик и в повышении надежности устройства, достигаемых за счет уменьшения динамических нагрузок, снижения амплитуд вертикальных колебаний грузонесущей связи, а также уменьшения вероятности возникновения аварийных ситуаций путем введения управляемого прохода резонансно-опасных зон работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1999 |
|
RU2158220C1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА СУДОВОГО КРАНА | 2003 |
|
RU2262464C2 |
| Гидравлический привод штамповочного молота | 1989 |
|
SU1682024A1 |
| ГИДРАВЛИЧЕСКИЙ ПРЕСС | 2013 |
|
RU2521570C1 |
| ГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО СОЛНЕЧНОГО ТРЕКЕРА | 2021 |
|
RU2769457C1 |
| РЕГУЛИРУЕМОЕ ГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО СОЛНЕЧНОГО ТРЕКЕРА | 2023 |
|
RU2803919C1 |
| Гидравлическое устройство для рекуперации энергии торможения транспортного средства | 1986 |
|
SU1357259A1 |
| В П ТСА. В. Еремин и А. С. НикифоровГ^ПУП (^??f5'jC;;?Tf^!J УиНд uatiHt^' Игй | 1973 |
|
SU373250A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1997 |
|
RU2131394C1 |
| СКВАЖИННЫЙ ЭЛЕКТРОГИДРОПРИВОДНОЙ НАСОСНЫЙ АГРЕГАТ | 1997 |
|
RU2116512C1 |
Применение: для подъема тяжелых грузов с больших глубин. Сущность изобретения: система содержит компенсатор вертикальных перемещений грузонесущей связи для захвата, который позволяет уменьшить динамические нагрузки и снизить амплитуду вертикальных колебаний этой связи. 1 ил.
СУДОВАЯ СИСТЕМА ДЛЯ ПОДЪЕМА ГРУЗОВ С ГЛУБИНЫ, содержащая источник электропитания, грузозахватный узел, связанный посредством грузонесущей связи, пропущенной через прорезь в корпусе судна, с подъемным механизмом, а также компенсатор вертикальных перемещений грузонесущей связи, включающий в себя поршневую пару вертикально закрепленную на судне, шток которой связан с грузонесущей связью, а полость нижней камеры сообщена с полостью пневмогидроаккумулятора, отличающаяся тем, что компенсатор снабжен одним четырехходовым и двумя двухходовыми двухпозиционными электромагнитными распределителями, двумя реле давления, четырьмя обратными клапанами, предохранительным клапаном, электронасосом и сливным баком, при этом полости камер поршневой пары соединены с соответствующими входами четырехходового распределителя, один выход которого соединен со сливным баком, а другой - с полостью пневмогидроаккумулятора, причем полость верхней камеры поршневой пары через первый обратный клапан соединена со сливным баком и через второй обратный клапан - с входом первого двухходового распределителя, выходом третьего обратного клапана и выходом первого реле давления, электрически связанного с электромагнитом первого двухходового распределителя, причем полость нижней камеры поршневой пары соединена с входом второго двухходового распределителя, входом третьего обратного клапана и входом второго реле давления, которое электрически связано с электромагнитом второго двухходового распределителя и первым реле давления, и через переключатель режима работы компенсатора с электромагнитом четырехходового распределителя и с источником питания, а выходы двухходовых распределителей связаны между собой, с пневмогидроаккумулятором и с входом предохранительного клапана и выходом четвертого обратного клапана, вход которого совместно с выходом предохранительного клапана связан с входом электронасоса, выход которого соединен со сливным баком.
