Изобретение относится к судостроению и может быть использовано при конструировании плавниковых движителей и тормозных устройств.
Известен плавниковый движитель преимущественно для подводного аппарата, содержащий крыло с приводом его управления и тормозным устройством.
Недостатком являются низкие маневренные качества подводного управляемого аппарата.
Цель изобретения - повышение маневренных качеств подводного управляемого аппарата.
Это достигается тем, что крыло движителя выполнено составным из двух частей, при этом носовая часть крыла выполнена со стеблем, приводом углового поворота его кормовой части вокруг горизонтальной оси в продольной плоскости симметрии крыла, а тормозное устройство выполнено в виде расположенной в носовой части аппарата полусферы с отверстием, имеющей возможность поворота для ориентации ее отверстия в сторону движения аппарата.
На фиг. 1 схематически изображен общий вид описываемого плавникового движителя подводного аппарата с тормозным устройством в носовой части этого аппарата, с обрывами; на фиг. 2 - описываемый плавниковый движитель при повороте кормовой части его крыла, с обрывом; на фиг. 3 - тормозное устройство в рабочем положении, расположенное в носовой части подводного аппарата с обрывом.
Описываемый плавниковый движитель установлен на подводном аппарате. Последний содержит корпус 1, электродвигатель 2 вращательного типа с двумя выходами валов, соединенными с осями 3, вращающимися в подшипниках, на которые насажены большие шкивы 4, передающие движение посредством передачи 5 на малые шкивы 6, насаженные на оси 7 и обеспечивающие поворот (вращение) полусферы 8 в нише 9. Плавниковый движитель имеет соединенный с электроприводом колебательного движения стебель 10. Крыло движителя имеет кормовую 11 и носовую 12 части. Последняя содержит в себе электродвигатель 13 вращательного движения с горизонтальной осью 14, входящей в часть 11 и зафиксированной в ней. Часть 11 может поворачиваться вокруг оси 14.
Замки-соленоиды 15 имеют сердечники 16, которые входят в отверстия 17 части 11 крыла. Замки-соленоиды 15 предназначены для фиксации угла поворота части 11 крыла.
Плавниковый движитель подводного аппарата эксплуатируется следующим образом. При подаче управляющей команды на торможение аппарата параллельно осуществляются две функции.
Первая состоит в том, что подается электроэнергия на соленоиды-замки 15, которые втягивают свои сердечники 16 из отверстия 17 кормовой части 11 крыла, тем самым давая возможность ее движению. Включается электродвигатель 13 и ось 14, проворачиваясь в подшипниках при жесткой ее связи с кормовой частью 11 крыла, разворачивает ее на 90о (фиг. 2) ребром по потоку. Это позволяет при отключении основного электропривода подводного аппарата, обеспечивающего его движение за счет колебания стебля 10 и частей 11 и 12 крыла и плавникового движителя, наложении электромагнитного или другого вида тормоза устранить создание силы тяги, возникающей из-за инерционности движения стебля 10 и крыла плавникового движителя, т. е. хотя стебель 10 по инерции еще и колеблется, часть 11 крыла плавникового движителя тяги не создает.
Вторая функция состоит в том, что одновременно с подачей напряжения на привод плавникового движителя подается напряжение на электродвигатель 2. Оси 3, проворачиваясь в подшипниках, поворачивают большой шкив 4. Через передачу 5 движение (вращательный момент) передается на малый шкив 6, жестко насаженный на оси 7, и полусфера 8, поворачиваясь на 90о входит в нишу корпуса 1 аппарата (фиг. 3). Тем самым носовая часть превращается из тела обтекаемой формы в тормозное устройство в виде полусферы 8 с отверстием, обращенным навстречу потоку, резко увеличивая сопротивление формы и трения. Это уменьшает путь и время торможения.
Резкое торможение как фактор, улучшающий маневренность, может также уменьшать радиус циркуляции движения подводного аппарата.
Поворот полусферы 8 на угол менее 90о оказывает воздействие на аппарат, подобное включению рулевых (подруливающих) устройств.
Если выполнить внутреннюю часть полусферы 8 в виде параболического зеркала (части параболоида вращения), то отдельные струи набегающего потока, попадающие на такую поверхность, после отражения от нее будут собираться в фокальной точке F (фиг. 3). Это явление создает дополнительный гидродинамический барьер перед набегающим потоком, также ускоряя процесс торможения подводного аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАВНИКОВЫЙ ДВИЖИТЕЛЬ | 1991 |
|
RU2033938C1 |
| Плавниковый движитель | 1990 |
|
SU1754578A1 |
| Плавниковый движитель | 1989 |
|
SU1689211A1 |
| Машущий плавниковый движитель | 1973 |
|
SU484129A1 |
| ПРИВОД ПЛАВНИКОВОГО ДВИЖИТЕЛЯ | 2005 |
|
RU2284945C1 |
| АВИАДЕСАНТИРУЕМЫЙ СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 2022 |
|
RU2782037C1 |
| Плавниковый движитель | 1973 |
|
SU529104A1 |
| ПЛАВНИКОВЫЙ ДВИЖИТЕЛЬ ПЛАВУЧЕГО СРЕДСТВА | 2015 |
|
RU2617321C1 |
| ПЛАВНИКОВЫЙ ЛОПАСТНОЙ ДВИЖИТЕЛЬ ДЛЯ ПЛАВСРЕДСТВ НАДВОДНОГО И ПОДВОДНОГО ПЛАВАНИЯ (ВАРИАНТЫ) | 2016 |
|
RU2622519C1 |
| СПОСОБ ПРИЕМА В ПОДВОДНУЮ ЛОДКУ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2328407C1 |
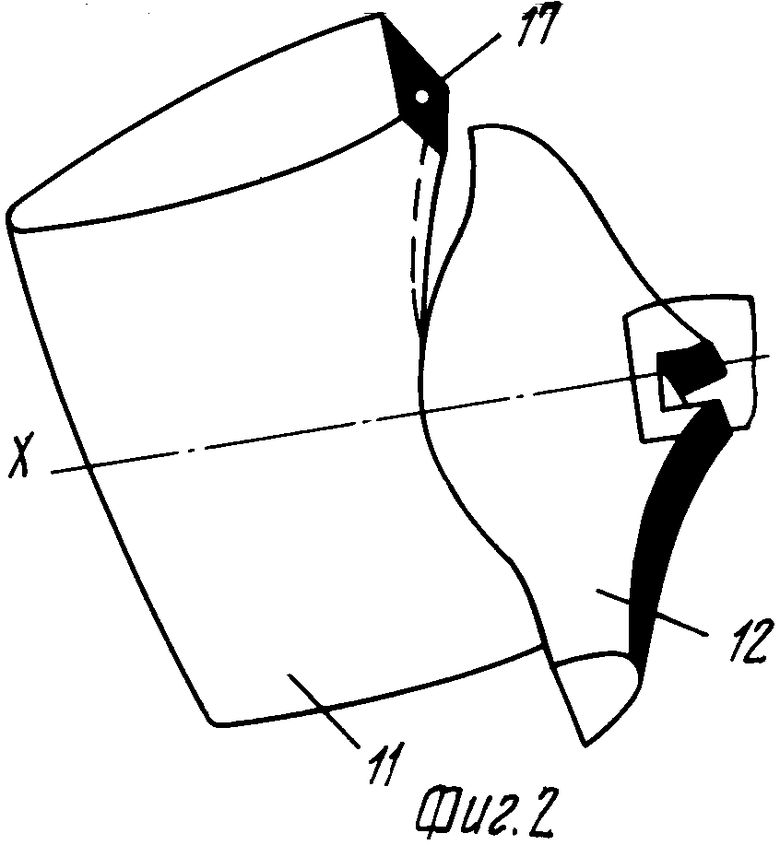

Использование: в судостроении, при конструировании плавниковых движителей с тормозными устройствами. Сущность изобретения: на корме корпуса подводного аппарата установлено составное из носовой 12 и кормовой 11 частей крыло плавникового движителя, а тормозное устройство смонтировано в носовой оконечности аппарата в виде полусферы 8 с отверстием, имеющей возможность поворота для ориентации ее отверстия в сторону движения аппарата. Плавниковый движитель имеет привод управления крылом, носовая часть 12 которого выполнена со стеблем 10, приводом углового поворота части 11 крыла вокруг горизонтальной оси 14 и замками-соленоидами 15 для фиксирования углового поворота части 11 крыла. 3 ил.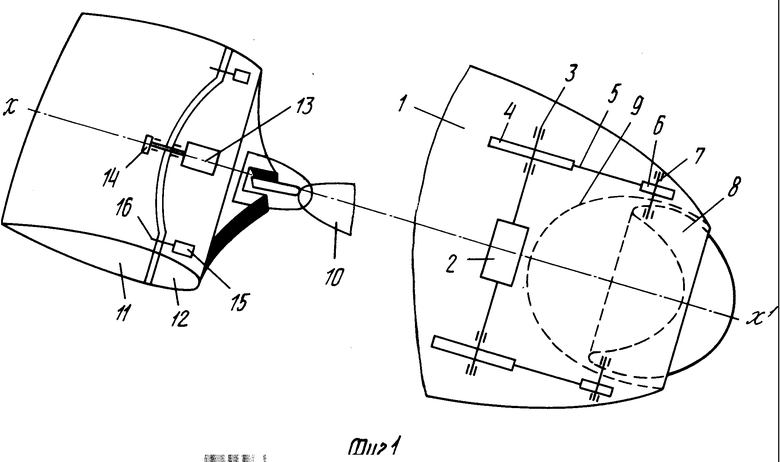
ПЛАВНИКОВЫЙ ДВИЖИТЕЛЬ, преимущественно для подводного аппарата, содержащий крыло с приводом его управления и тормозным устройством, отличающийся тем, что крыло движителя выполнено составным из двух частей, при этом носовая часть крыла выполнена со стеблем, приводом углового поворота его кормовой части вокруг горизонтальной оси в продольной плоскости симметрии крыла и замками-соленоидами для фиксации углового поворота кормовой части крыла, а тормозное устройство выполнено в виде расположенной в носовой части аппарата полусферы с отверстием, имеющим возможность поворота для ориентации ее отверстия в сторону движения аппарата.
