Изобретение относится к судостроению и может быть использовано при конструировании плавниковых движителей.
Известны крылья большой стрекозы, где складочные структуры - на переднем крае крыла, необходимые для создания условий отрыва пограничного слоя. Стрекоза делает процесс отрыва на передней кромке крыла регулируемым, что обеспечивает движение при сильном увеличении давления.
Исследования, предпринятые для оценки количественной информации аэродинамики крыла стрекозы (Re 10-) и объясненные с точки зрения теории вихре- образования, показали, что аэродинамические качества полета с гофрированной передней секцией крыла лучшие, чем с плоским крылом. В частности эффективность таких турбулизаторов состоит в небольшом увеличении силы тяги. При низком угле атаки сила тяги намного больше из-за большей поверхности образования вихрей
В радиотехнике изменение характеристик и преобразование волн с помощью еы- ступов, складок, зубцов реализуется в устройствах антенн и излучателей (рупорных, апертурных).
В конструкциях ласт регулировгн е волнообразного потока осуществляете из менением конструкции Лопасти, приданием ей волнообразной формы, или созданием выступов и впадин в определенных частях.
Известны конструкции предкрылков, используемых в воздушном транспорте. В частности, поверхность крыла имеет прерывистое линейное вихреобразное приспособленце, которое находится за передней кромкой поперек направления обтекания и создает ряд последовательных скатывающихся вихрей, расположенных поперек потока.
Наиболее близким к изобретению является устройство, в котором плавниковый движитель содержит прикрепленный к корпусу плавсредства привод поворотно-колебательного движения, кинематически связанный с рычагом, к свободному концу которого шарнирно прикреплена лопасть с приводом ее поворотно-колебательного движения, а также блок управления приводами.
В этой конструкции для повышения надежности приводы поворотно-колебательного движения рычага и лопасти выполнены в виде электромагнитных двигателей неполу
Ё
XI
сл
Јь
сл XJ
00
ноповоротного типа, каждый из которых содержит по две секции статора с обмотками и полюсами, смещенными одни относительно Других на предельный угол поворота рычага, и однополюсный якорь, к которому жестко прикреплен рычаг, а блок автоматического управления приводами содержит задающий генератор, узел задания закона поворота лопасти, распределитель импульсов, усилители и накопитель энергии. Задающий генератор через узел закона поворота лопасти подсоединен ъходу распределителя импульсов, выходы Которого подключены к входам накопителя энергии и усилителей и через последние электрически связаны с обмотками двигателей обоих приводов.
Основным недостатком этого устройства является невозможность регулирования отрыва аихрей и, следовательно, управлением гидродинамическим качеством крыла.
Цель изобретения - повышение эффективности движения путем оптимизаций гидродинамического качества крыла.
Поставленная цель достигается тем, чть в плавниковом движителе, содержащем крыло, установленное с возможностью поворота, имеются салиноны и привод их поворота, который размещен в носовой части крыла и выполнен с осями, на которых установлены упомянутые салиноны с возможностью их поворота в сторону несущей поверхности крыла.
Общий вид конструкции представлен на фиг. 1; крыло с прорезями показано на фиг. 2а; салиной - на фиг, 3, 4.
Плавниковый движитель содержит крыло 1 с гибкой задней кромкой и размещенным в нем электроприводом вращательного движения 2 с двумя выходными валами, переходящими в оси 3, вращающиеся в подшипниках 4 и жестко связанные с осями салиноны 5, проворачивающиеся с одной стороны с наружной поверхности крыла, а с другой - в прорезях б, выполненных в теле крыла; стебель 7 с осью 8 и плоскими пружинами 9, установленными на обеих сторонах стебля, соединенном с приводом колебательного движения подводного аппарата.
Основания саллнонов представляют собой собственно фигуру, подобную салино- ну, в которой
AC BD, EF EC ED, KF1AB Причем
DA2 fCA2 (DE2 i-EA2)(1)
На фиг. 3 дается положение салинона 5 по отношению к крылу 1 и поворот салинона (пунктирная линия) вокруг точки О - предполагаемого выхода оси 3
В нейтральном положении устройство показано на фиг. 4.
Плавниковый движитель работает следующим образом.
При колебании стебля 7 слева направо
включается электродвигатель 2, проворачиваются оси 3 в подшипниках 4 и жестко связанные с ними салиноны 5 таким образом, чтобы перед несущей поверхностью
крыла, формирующей силу тяги, образовывался выступ, обеспечивающий отрыв пограничного слоя. При этом боковая кромка (образующая полуцилиндра) салинок вплотную приближается к несущей гюверхности крыла, образуя с ней единую поверхность - ,
При колебании стебля 7 справо-иалево происходит реверс электродвигателя 2, в результате чего оси 3 и салиноны 5 поворачиваются на другую сторону крыла 1, ставшей его несущей поверхностью.
Рассмотренные положения описаны для одного угла атаки и одного режима работы машущего плавникового движителя.
При отключении электродвигателя 2 в
определением фиксированном положении сапинонов 5 возможно получение максимального угла этики и наибольшей зоны от рыва пограничного слоя, что o6ecf e ic)eae-r
наилучшее гидродинамическое качество. При колебании плавникового движителя с разными фиксированными положениями салинонов 5 и выключенном электродвигателе 2 меняются углы атаки. Если произведен поворот салинона 5 в одну сторону и фиксирование его положения при ионном цикле колебания, то это приведет также к развороту объекта (подводного аппарата). В этом случае плавниковый движитель выполняет функции рулевого устройства. Изменение угла атаки с помощью салинонов изменяет не только условия отрыва пограничного слоя, но и КПД машущего крыла. Следовательно, подбирая угол поворота салинонов, можно эффективно управлять гид- родинамическим качеством крыла и оптимизировать его в соответствии с условиями регулирования отрывом пограничного слоя и режимами движения подводного
аппарата.
Конкретное выполнение разработки требует учета следующих факторов.
По дуге полуокружности АКБ нижнее и верхнее основания салинонов соединяются поверхностью полуцилиндра. Кривая AFB остается разомкнутой.
Во избежание отрыва потока с острых кромок в точках А и В при повороте цилиндра образующие полуцилиндров должны
быть плавно загнуты по всей длине салино- на вовнутрь полуокружностей АС и DB
При фиксировании салинонов в промежуточных положениях если их выполнить пустотелыми, поток может проходить как снаружи, так и с внутренних их сторон Для предотвращения такого движения потока и люфта салинонов при поворотах их внутренняя часть (между наружной поверхностью передней кромки крыла и внутренней поверхностью полуцилиндров) может заполняться резиной, упругие свойства которой проявляются, если есть возможность для расширения .в стороны (динамический модуль упругости резины, кг/см , губчатой 30, мягкой 50; специальных сортов 100; средней жесткости 200, коэффициент линейного расширения вулканизированной резины 0,72.104
Резина жестко соединяется с внутренней частью салинонов и поворачивается вместе с ними вокруг передней кромки крыла. Таким образом устраняется зазор между
передней поверхностью крыла и салино- ном Если же салиноны будут работать только в крайних положениях, то прокладочный материал не требуется
Для фиксирования точного положения
салинонов в качестве электродвигателя вращательного типа 2 может быть использован шаговый электродвигатель, точность остановки из изменения положения которого достигает 1
Формула изобретения Плавниковый движитель, содержащий крыло, установленное с возможностью поворота, отличающийся тем, что, с целью повышения эффективности движителя пу тем оптимизации гидродинамического качества крыла, он снабжен салинонами и приводом их поворота, который размещен в
носовой части крыла и выполнен с осями, на которых установлены упомянутые салиноны с возможностью их поворота в сторону несущей поверхности крыла. 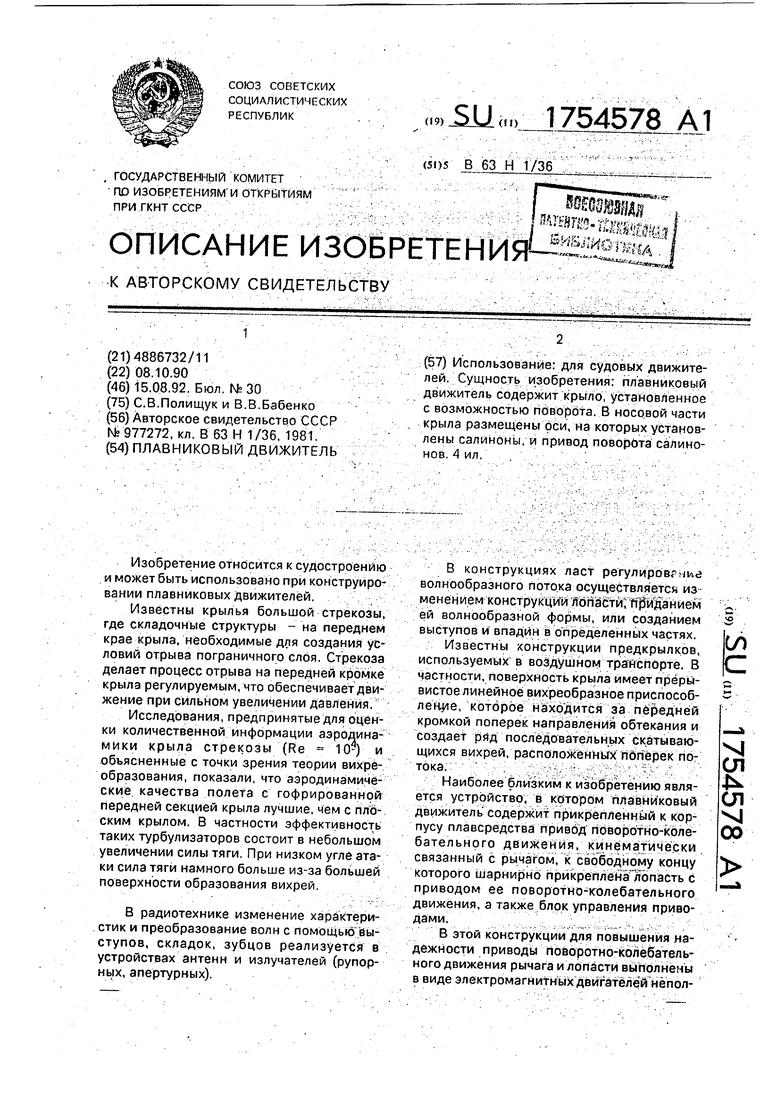


| название | год | авторы | номер документа |
|---|---|---|---|
| Машущий плавниковый движитель | 1973 |
|
SU484129A1 |
| ПЛАВНИКОВЫЙ ДВИЖИТЕЛЬ | 1991 |
|
RU2013305C1 |
| Плавниковый движитель | 1973 |
|
SU529104A1 |
| ПЛАВНИКОВЫЙ ДВИЖИТЕЛЬ | 1990 |
|
RU2025405C1 |
| Активный скуловой стабилизатор качки судна | 2019 |
|
RU2749820C2 |
| Самостабилизирующийся лопастной движитель | 2022 |
|
RU2798298C1 |
| Судовой движитель | 2019 |
|
RU2745044C1 |
| КОРАБЛЬ С ПЛАВНИКОВЫМ ДВИЖИТЕЛЕМ | 2007 |
|
RU2360831C2 |
| ПЛАВНИКОВЫЙ ДВИЖИТЕЛЬ | 1991 |
|
RU2033938C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ - АЭРОПЛАН С МАШУЩИМ ВИНТОМ (ЖУКОПЛАН) | 2013 |
|
RU2540040C1 |
Использование: для судовых движителей Сущность изобретения: плавниковый движитель содержит крыло, установленное с возможностью поворота. В носовой части крыла размещены оси, на которых установлены салиноны, и привод поворота салино- нов 4 ил.
798
Фиг.1
ggs
Фиг. 2
ФагЗ
/
/
фиг&
| Плавниковый движитель | 1981 |
|
SU977272A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
