Изобретение относится к радиотехническим системам, в частности радиолокации, и может быть использовано в системах радиоуправления, автоматики и т. п. Известно устройство слежения за дальностью и скоростью цели (см. , например, М. В. Максимов и Г. Н. Горгонов. Радиоэлектронные системы самонаведения. М. : Радио и связь, 1982, с. 213), содержащее дискретный временной различитель (дискриминатор), усилители, первый цифpовой интегратор, два сумматора, второй цифровой интегратор.
Известно также дискретное устройство измерения дальности и скорости цели (см. , например, М. С. Ярлыков и А. С. Богачев. Авиационные радиоэлектронные комплексы, их боевое применение и эффективность. / Под ред. М. С. Ярлыкова - Изд. ВВИА им. проф. Н. Е. Жуковского, 1983, с. 101), содержащее дискриминаторы по дальности и скорости, усилители, сумматоры, устройства задержки.
В известном устройстве недостаточная устойчивость и точность отслеживания координат возникает за счет невозможности реализации безынерционного регулятора, несоответствия закона изменения дальности и скорости цели прогнозируемым значениям в измерителе.
Наиболее близким по своей технической сущности к предложенному является устройство слежения за координатами цели, принятое за прототип, содержащее последовательно включенные дискриминатор, первый усилитель, первый сумматор, первое устройство задержки, цифровой интегратор, второй сумматор, третий сумматор, второе устройство задержки, выход которого соединен с вторым входом второго сумматора, при этом выход дискриминатора соединен также через третий усилитель с вторым входом третьего сумматора, выход второго сумматора соединен с вторым входом дискриминатора, выход первого устройства задержки соединен с входом четвертого усилителя, выход которого соединен с вторым входом первого сумматора.
Недостатком устройства, принятого за прототип, является низкая устойчивость слежения при несоответствии закона изменения дальности и скорости цели прогнозируемым значением в измерителе. Например, в момент целеуказания, резком маневре цели.
Целью изобретения является повышение устойчивости слежения за дальностью и скоростью цели.
Поставленная цель достигается тем, что в устройство слежения за координатами цели, содержащее последовательно включенные первый дискриминатор, первый усилитель, первый сумматор, первое устройство задержки, цифровой интегратор, второй сумматор, третий сумматор, второе устройство задержки, выход которого соединен с вторым входом второго сумматора, при этом выход первого дискриминатора через второй усилитель соединен также с вторым входом третьего сумматора, выход второго сумматора соединен с вторым входом первого дискриминатора, выход первого устройства задержки соединен с входом третьего усилителя, выход которого соединен с вторым входом первого сумматора, дополнительно включен контур слежения за скоростью цели, содержащей последовательно соединенные второй дискриминатор, четвертый усилитель, четвертый сумматор, третье устройство задержки, пятый усилитель, выход которого подключен к второму входу четвертого сумматора, второму входу второго дискриминатора, при этом выход первого дискриминатора через шестой усилитель соединен с третьим входом четвертого сумматора, выход второго дискриминатора соединен через восьмой усилитель с третьим входом первого сумматора, а через седьмой усилитель - с третьим входом третьего сумматора, выход первого устройства задержки соединен с первым входом вычитающего устройства, выход третьего устройства задержки дополнительно подключен к второму входу вычитающего устройства, выход которого через последовательно соединенные девятый усилитель, четвертое устройство задержки соединен с первым входом второго дискриминатора.
При анализе известных технических решений не обнаружены решения, имеющие признаки, сходные с отличительными признаками изобретения.
На основании проведенного анализа можно сделать вывод, что предложенное техническое решение обладает существенными отличиями. Наличие совокупности существенных признаков обеспечит возможность устойчивого сопровождения цели по дальности и скорости.
На чертеже приведена функциональная схема устройства для отслеживания координат цели.
Устройство состоит из первого дискриминатора 1, имеющего два входа 1 и 2, выход которого через первый усилитель 2, первый сумматор 3, первое устройство задержки 4, цифровой интегратор 5, второй сумматор 6, третий сумматор 7 подключен к входу второго устройства задержки 8, выход которого соединен с вторым входом 2 второго сумматора 6, при этом выход первого дискриминатора через второй усилитель 9 соединен с вторым входом 2 третьего сумматора 7, выход второго сумматора 6 соединен также с вторым входом 2 первого дискриминатора 1, выход первого устройства задержки 4 через третий усилитель 10 соединен с вторым входом 2 первого сумматора, выход второго дискриминатора 11 через четвертый усилитель 12, четвертый сумматор 13, третье устройство задержки 14 подключен к входу пятого усилителя 15, выход которого подключен к второму входу 2 четвертого сумматора 13, второму входу 2 второго дискриминатора 11, кроме того, выход первого дискриминатора через шестой усилитель 16 соединен с третьим входом 3 четвертого сумматора 13, выход второго дискриминатора соединен также через восьмой усилитель 17 с третьим входом 3 первого сумматора 3, а через седьмой усилитель 18 - с третьим входом 3 третьего сумматора 7, выход первого устройства задержки 4 соединен с первым входом 1 вычитающего устройства 19; выход третьего устройства задержки 14 дополнительно подключен к второму входу 2 вычитающего устройства 19, выход которого через девятый усилитель 20, четвертое устройство задержки 21 соединен с первым входом 1 второго дискриминатора 11.
Работа устройства слежения за координатами цели осуществляется следующим образом.
Перед захватом измерителем сигналов от движущейся цели выполняется целеуказание по дальности и скорости путем ввода дискретных сигналов на выходы первого, третьего и четвертого устройств задержки (целеуказание по скорости) и второй вход 2 второго сумматора 6 (целеуказание по дальности). Выходные дискретные сигналы, пропорциональные текущей дальности и скорости цели, снимаются с выходов третьего сумматора 7 и первого сумматора 3. Так как устройство функционирует в дискретном режиме, то обновление входных и выходных сигналов во всех элементах схемы выполняется через время, равное времени интервала дискретизации Тп. На это же время выполняется задержка сигналов в устройствах задержки 4, 8, 14, 21. Например, в импульсной радиолокационной станции время Тп может быть равно периоду повторения. Текущая измеренная дальность на выходе третьего сумматора 7 через один такт (интервал Тп) будет складываться из сигнала дальности, введенного в момент целеуказания, сигнала с выхода цифрового интегратора, пропорционального расстоянию, на которое сблизилась (удалилась) цель за один такт, и сигналов рассогласования с выходов первого 1 и второго дискриминаторов 11 с учетом их усиления в усилителях 9 и 18.
Сигнал рассогласования на выходе первого дискриминатора 1 формируется путем сравнения дискретных сигналов, пропорциональных текущей (на входе 1) и измеренной (на входе 2) дальности. Сигнал рассогласование на выходе второго дискриминатора 11 формируется путем сравнения дискретных сигналов, пропорциональных управляемой (на входе 1) и управляемой измеренной (на входе 2) скоростям цели. При этом текущий выходной сигнал, пропорциональный измеренной скорости цели, через такт будет складываться из прогнозируемой скорости, полученной путем перемножения сигнала целеуказания по скорости на коэффициент усиления третьего усилителя 10 и сигналов рассогласования первого 1 и второго 11 дискриминаторов с учетом их усиления в усилителях 2 и 17.
Аналогичные операции выполняются и в дополнительном контуре слежения за скоростью цели, реализованном на втором дискриминаторе 11, усилителях 12, 15, четвертом сумматоре 13, третьем устройстве задержки 14. При этом входной сигнал на первом входе 1 второго дискриминатора формируется путем усиления выходного сигнала вычитающего устройства 19 в усилителе 20 и задержки на один такт в четвертом устройстве задержки 21. По истечении очередного такта все описанные операции повторяются, при этом в качестве сигналов, пропорциональных измеренным дальности и скорости, используются дискретные сигналы, полученные в предыдущем такте. Через определенное количество тактов работы устройства величины рассогласований на выходах дискриминаторов 1 и 11 будут минимальным, что соответствует переходу устройства слежения из режима целеуказания в установившийся режим. Процесс бессрывного перехода устройства слежения в установившийся режим слежения по дальности и скорости будет иметь место при резких маневрах цели или изменении ее скорости.
Таким образом предложенное устройство осуществляет слежение за дальностью и скоростью цели. Повышение устойчивости перехода устройства слежения из режима целеуказания в установившийся режим бессрывное отслеживание дальности и скорости цели в случае ее маневра или изменения скорости цели обеспечивается включением в его состав дополнительного контура слежения, формирующего сигнал управления по координате скорости и перекрестных связей между дискриминаторами 1, 11 сумматорами 13, 3, 7.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СЛЕЖЕНИЯ ЗА КООРДИНАТАМИ ЦЕЛИ | 1998 |
|
RU2172001C2 |
| БОРТОВАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ДВУХ ЦЕЛЕЙ | 1992 |
|
RU2074405C1 |
| ДАЛЬНОМЕР ПРИ ВОЗДЕЙСТВИИ ПОМЕХИ, УВОДЯЩЕЙ ПО ДАЛЬНОСТИ | 1997 |
|
RU2119174C1 |
| УСТРОЙСТВО СЛЕЖЕНИЯ ЗА КООРДИНАТАМИ ЦЕЛИ | 2000 |
|
RU2189056C2 |
| УСТРОЙСТВО СОПРОВОЖДЕНИЯ МАНЕВРИРУЮЩЕЙ ЦЕЛИ | 2004 |
|
RU2292061C2 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2006 |
|
RU2309430C1 |
| СПОСОБ ПОМЕХОЗАЩИЩЕННОГО ОБНАРУЖЕНИЯ МАНЁВРА ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2235343C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОБЪЕМНОГО РАСХОДА ВЕЩЕСТВ С ПОМОЩЬЮ УЛЬТРАЗВУКОВЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2169906C2 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| УСТРОЙСТВО ОБРАБОТКИ ЛОКАЦИОННЫХ СИГНАЛОВ | 2013 |
|
RU2515291C1 |
Сущность изобретения: устройство слежения за координатами цели содержит дискриминаторы 1,11, усилители 2, 9, 10, 12, 15, 16, 17, 18, 20, сумматоры 3, 6, 7, 13, блоки задержки 4, 8, 14, 21, интегратор 5 и вычитающий блок 19. 1-2-3-4-5-6-7-8-1-9-7, 11-12-13-14-15-11-17-3, 1-16-13, 11-8-7, 4-10-3, 4-19-20-21-11, 15-11, 6-1. 1 ил.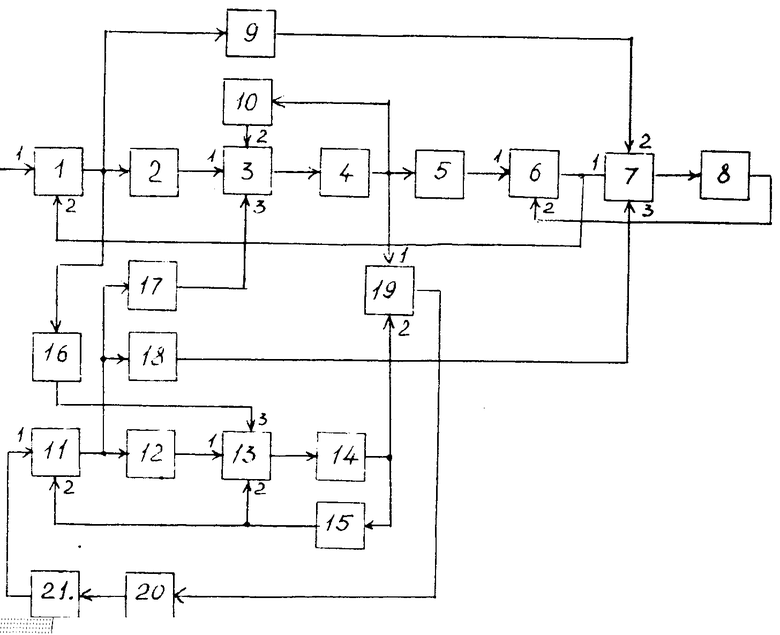
УСТРОЙСТВО СЛЕЖЕНИЯ ЗА КООРДИНАТАМИ ЦЕЛИ, содержащее последовательно включенные первый дискриминатор, первый усилитель, первый сумматор, первый блок задержки, цифровой интегратор, второй сумматор, третий сумматор и второй блок задержки, выход которого соединен с вторым входом второго сумматора, выход первого дискриминатора через второй усилитель соединен с вторым входом третьего сумматора, выход второго сумматора соединен с вторым входом первого дискриминатора, выход первого блока задержки соединен с входом третьего усилителя, выход которого соединен с вторым входом первого сумматора, отличающееся тем, что введены последовательно соединенные второй дискриминатор, четвертый усилитель, четвертый сумматор, третий блок задержки и пятый усилитель, выход которого подключен к вторым входам четвертого сумматора и второго дискриминатора, шестой, седьмой, восьмой, девятый усилители, блок вычитания и четвертый блок задержки, выход первого дискриминатора через шестой усилитель соединен с третьим входом четвертого сумматора, выход второго дискриминатора через восьмой усилитель соединен с третьим входом первого сумматора, а через седьмой усилитель - с третьим входом третьего сумматора, выход первого блока задержки соединен с первым входом вычитающего блока, выход третьего блока задержки соединен с вторым входом вычитающего блока, выход которого через последовательно соединенные девятый усилитель и четвертый блок задержки соединен с первым входом второго дискриминатора.
