Изобретение относится к подъемно-транспортной технике и может быть использовано при механизации широкого круга работ, связанных с операциями переноса рабочего органа по прямолинейной траектории, например, в валочно-пакетирующих машинах, погрузчиках, экскаваторах, промышленных роботах для работы с тяжелыми грузами.
Известны гидравлические манипуляторы, содержащие стойку, плечо, предплечье, на конце которого установлен рабочий орган, гидроцилиндры поворота плеча и предплечья и систему для перемещения рабочего органа по прямолинейной траектории.
Недостатком таких манипуляторов является сложность системы для перемещения рабочего органа по прямолинейной траектории.
Цель изобретения - упрощение конструкции системы перемещения рабочего органа по прямолинейной траектории.
Для достижения поставленной цели точки крепления гидроцилиндра поворота плеча на стойке и гидроцилиндра поворота предплечья на плече лежат на окружности, радиус которой равен радиусу окружности точек крепления гидроцилиндра поворота плеча на плече и гидроцилиндра поворота предплечья на предплечье, при этом отношение площади рабочей полости гидроцилиндра поворота плеча (F1) к площади рабочей полости гидроцилиндра поворота предплечья (F2) равно отношению скорости поворота предплечья (V2) к скорости поворота плеча (V1), т. е. 

 , причем одноименные полости гидроцилиндров поворота плеча и предплечья сообщены между собой по дифференциальной схеме через гидрораспределитель.
, причем одноименные полости гидроцилиндров поворота плеча и предплечья сообщены между собой по дифференциальной схеме через гидрораспределитель.
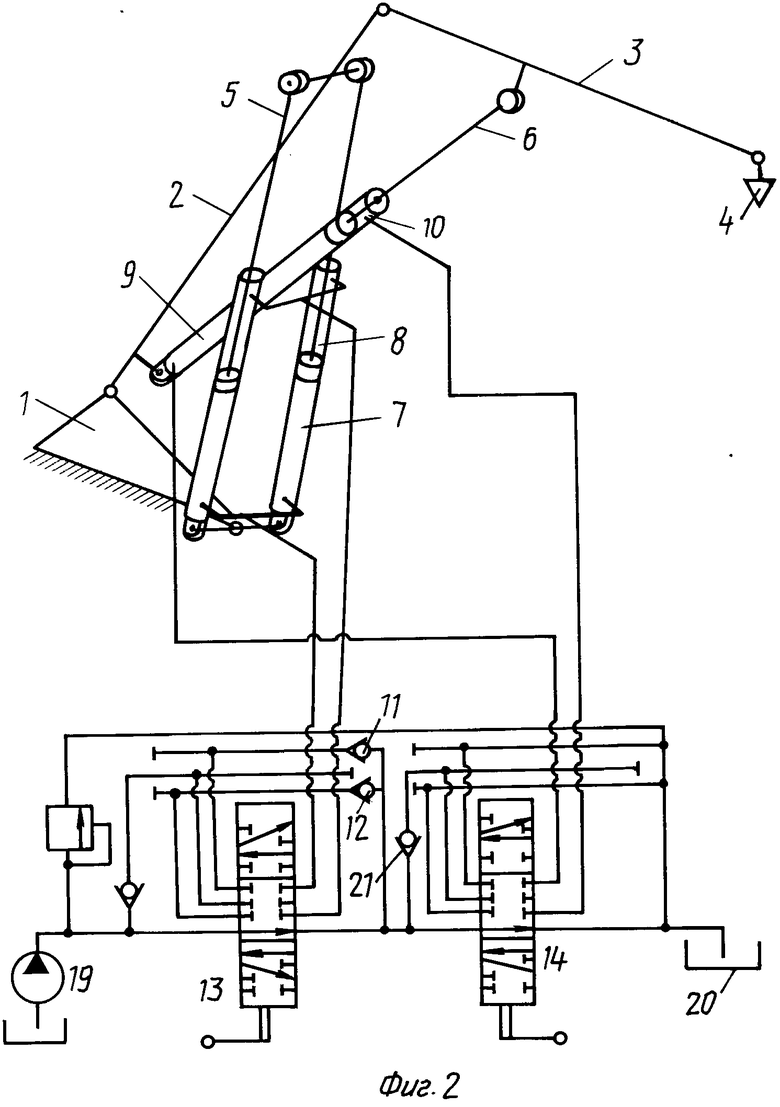
На фиг. 1 изображена кинематическая схема манипулятора; на фиг. 2 - гидравлическая схема манипулятора.
Манипулятор состоит из стойки 1, плеча 2, предплечья 3, на конце которого установлен рабочий орган 4. Точки крепления гидроцилиндра 5 поворота плеча на стойке 1 и гидроцилиндра 6 поворота предплечья на плече 2 лежат на окружности, радиус r1 которой равен радиусу r2 окружности точек крепления гидроцилиндра поворота плеча на плече и гидроцилиндра поворота предплечья на предплечье. При этом рабочая полость гидроцилиндра поворота плеча F1 и рабочая полость гидроцилиндра поворота предплечья F2 выбирают исходя из отношения скорости поворота предплечья v2 к скорости поворота плеча v1, т.е.  =
=  . Причем полость 7 гидроцилиндра 5 поворота плеча сообщена с полостью 8 гидроцилиндра 6 поворота предплечья по дифферинциальной схеме через золотники 13 и 14 и клапаны 11, 12 и 21. Золотники 13 и 14 подключены к насосу 19.
. Причем полость 7 гидроцилиндра 5 поворота плеча сообщена с полостью 8 гидроцилиндра 6 поворота предплечья по дифферинциальной схеме через золотники 13 и 14 и клапаны 11, 12 и 21. Золотники 13 и 14 подключены к насосу 19.
Если размеры стойки 1, плеча 2 и предплечья 3 выбрать такими, что при заданной площади 15 обслуживания угол α1 поворота плеча в два раза меньше угла α2 поворота предплечья, то в этом случае можно использовать одинаковые цилиндры - два для поворота плеча и один для поворота предплечья, т.е. использовать практические схемы манипуляторов, только по другому закрепить гидроцилиндры на звеньях.
Работа манипулятора осуществляется по двум программам - перемещение рабочего органа 4 по криволинейным траекториям 16 или 17 и перемещение рабочего органа по прямолинейной траектории 18.
Для перемещения рабочего органа по криволинейным траекториям 16 или 17 пользуются золотниками 13 или 14, например при перемещении золотника 13 вверх по схеме фиг. 2 рабочая жидкость поступает в штоковую полость 8 гидроцилиндров 5 поворота плеча 5, а из поршневой полости 7 сливается в бак 20, при этом плечо поворачивается по часовой стрелке, а конец предплечья 3 с рабочим органом перемещается по криволинейной траектории 17. Подобное происходит и при включении золотника 14, только рабочий орган перемещается по криволинейной траектории 16.
Перемещение рабочего органа по прямолинейной траектории 18 происходит, если одновременно включены золотники 13 и 14, например при перемещении золотника 13 вверх по схеме фиг. 2, золотника 14 вниз рабочая жидкость от насоса 19 поступает в штоковую полость гидроцилиндров 5 поворота плеча, из поршневой полости через клапаны 11 и 21 и золотник 14 - в штоковую полость гидроцилиндра 6 поворота предплечья и из его штоковой полости сливается через золотник 14 в бак 20, т.е. перемещение рабочего органа по прямолинейной траектории происходит при одновременном повороте плеча на угол α1 и предплечья на угол α 2.
Благодаря тому, что точки крепления гидроцилиндров 5 на стойке 1 и гидроцилиндра 6 на плече 2 лежат на окружности, радиус r1 которой равен радиус r2 окружности, на которой лежат точки крепления гидроцилиндров 5 на плече 2 и гидроцилиндра 6 на предплечье 3 и сообщения рабочих полостей по дифференциальной схеме, упрощает конструкцию системы перемещения рабочего органа по прямолинейной траектории, так как становится возможным использовать обычную схему манипулятора для криволинейного перемещения рабочего органа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ МАНИПУЛЯТОРОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1986 |
|
RU2028929C1 |
| СПОСОБ УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ РАБОЧЕГО ОРГАНА ГРУЗОПОДЪЕМНОГО УСТРОЙСТВА | 1992 |
|
RU2008199C1 |
| ГИДРОПРИВОД УПРАВЛЕНИЯ РАБОЧИМИ ОРГАНАМИ МАНИПУЛЯТОРА | 1992 |
|
RU2039172C1 |
| ПОГРУЗОЧНЫЙ МАНИПУЛЯТОР | 1992 |
|
RU2038284C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ МАНИПУЛЯТОРОМ | 2003 |
|
RU2240226C1 |
| Механизм подъема стрелы манипулятора | 2018 |
|
RU2682866C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1994 |
|
RU2113396C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167805C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПОЧВЫ В РЯДАХ МНОГОЛЕТНИХ НАСАЖДЕНИЙ | 2003 |
|
RU2238619C1 |
| Гидропривод лесозаготовительных машин манипуляторного типа | 1991 |
|
SU1805226A1 |

Изобретение относится к подъемно-транспортной технике и может быть использовано при механизации широкого круга работ, связанных с операциями переноса рабочего органа по прямолинейной траектории, например в валочно-пакетирующих машинах и погрузчиках-штабелерах в лесной промышленности, а также в экскаваторах, промышленных роботах для работы с тяжелыми грузами. На конце предплечья установлен рабочий орган, гидроцилиндры поворота плеча и предплечья. Точки крепления гидроцилиндров на плече лежат на окружности, радиус r1 которой равен радиусу r2 окружности точек крепления этих гидроцилиндров на предплечье. При этом отношение площади рабочей полости гидроцилиндра поворота плеча F1 к площади рабочей полости гидроцилиндра поворота предплечья F2 равно отношению скорости V2 поворота предплечья к скорости V1 поворота плеча. При этом одноименные полости гидроцилиндров поворота плеча и предплечья сообщены между собой по дифференциальной схеме через гидрораспределитель - золотники и клапаны. 2 ил.
ГИДРАВЛИЧЕСКИЙ МАНИПУЛЯТОР для перемещения рабочего органа по поступательной траектории, содержащий стойку, плечо, предплечье, на конце которого установлен рабочий орган, гидроцилиндры поворота плеча и предплечья, связанные с помощью гидролиний между собой, с источником давления и со сливом, отличающийся тем, что точки крепления гидроцилиндров поворота плеча на стойке и гидроцилиндра поворота предплечья на плече лежат на окружности, радиус которой равен радиусу окружности, на которой расположены точки крепления гидроцилиндров поворота плеча на плече и гидроцилиндра поворота предплечья на предплечье, причем для поворота плеча и предплечья установлены одинаковые гидроцилиндры - два для поворота плеча и один для поворота предплечья, и одноименные полости гидроцилиндров поворота плеча и предплечья сообщены через дополнительно введенные в гидролинии два золотника-распределителя, каналы которых сообщены между собой по дифференциальной схеме.
