Изобретение относится к управлению рабочими органами манипулятора и может быть использовано в лесной и строительной промышленности, а именно в гидроприводах лесозаготовительных машин и одноковшовых экскаваторах.
Известен гидропривод управления рабочими органами манипулятора, содержащий источник питания, вход которого подсоединен к баку рабочей жидкости, а выход к входу реверсивного золотника распределителя, один из выходов которого подключен с помощью магистрального трубопровода, например, к поршневым полостям гидроцилиндров поворота стрелы, а другой к поршневой полости гидроцилиндра поворота рукояти, при этом их штоковые полости сообщены между собой трубопроводом [1]
Такой гидропривод позволяет одновременно управлять гидроцилиндрами поворота стрелы и рукояти с помощью одного золотника распределителя, обеспечивая перенос захвата в пространстве из одной точки в другую по траектории близкой к прямолинейной, но совершенно исключает возможность раздельного управления этими гидроцилиндрами, что уменьшает функциональные возможности манипулятора.
Целью изобретения является расширение функциональных возможностей манипулятора.
Для этого каждый или один из выходов реверсивного золотника распределителя линией связи подсоединен к одному из выходов реверсивного золотника раздельного управления, второй выход которого общим магистральным трубопроводом подключен к трубопроводу штоковых полостей.
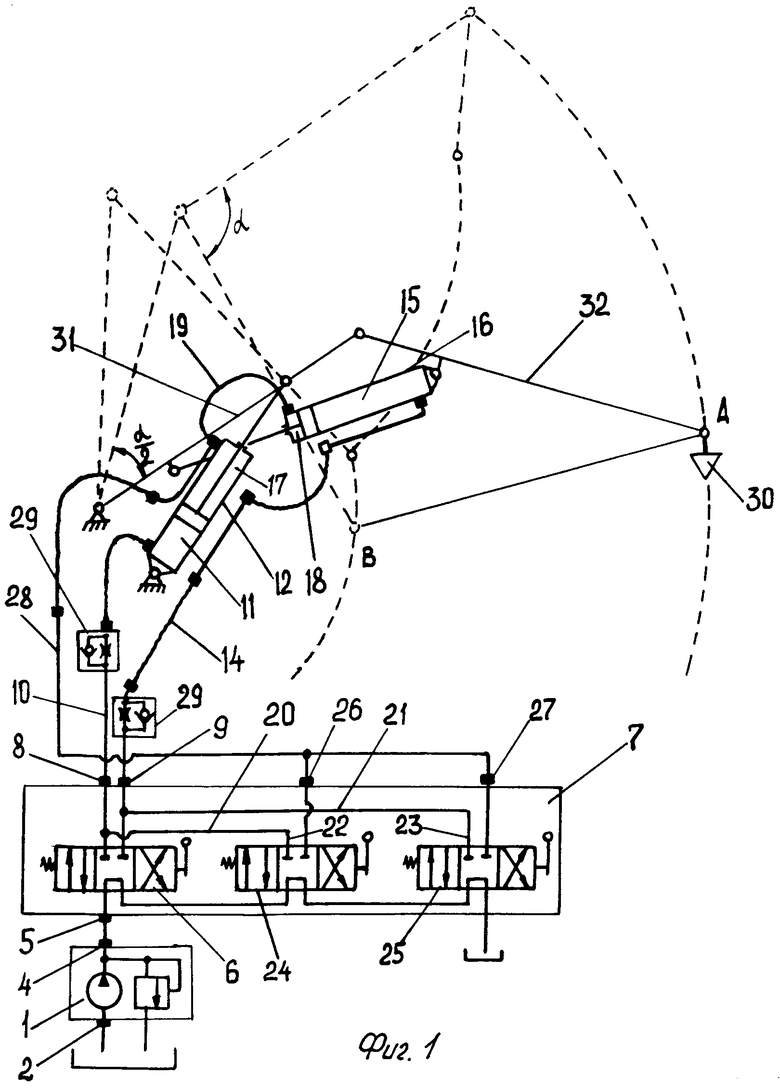
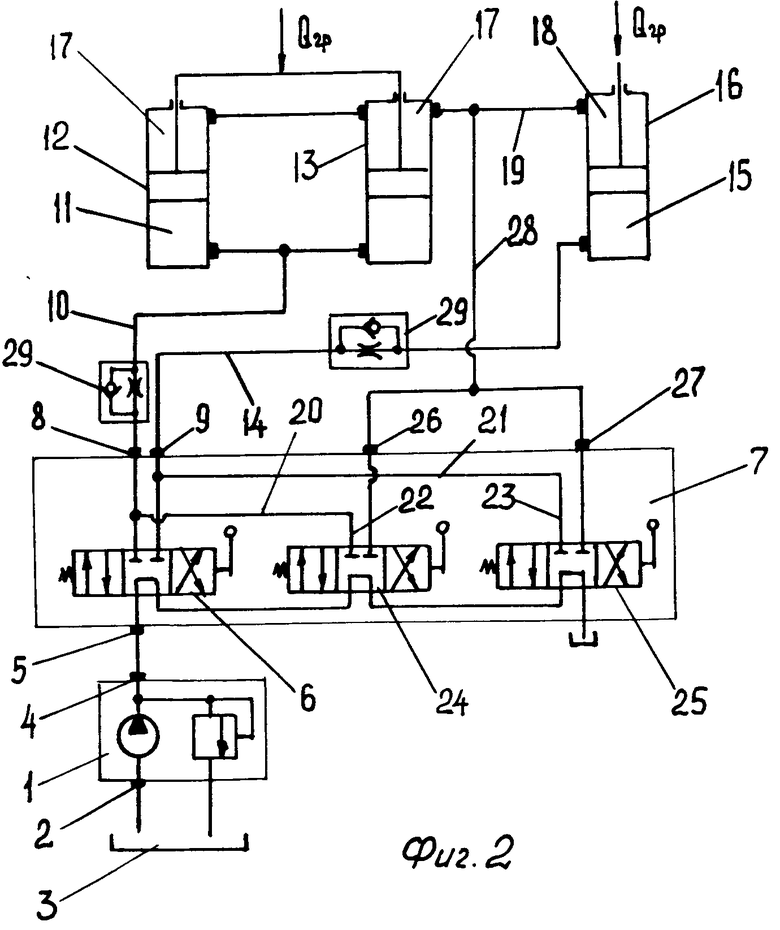
На фиг.1 показана принципиальная схема гидропривода для управления стрелой и рукоятью манипулятора; на фиг.2 то же, в упрощенном виде.
Гидропривод содержит источник питания 1, вход 2 которого подсоединен к баку рабочей жидкости 3, а выход 4 к входу 5 золотника 6 реверсивного распределителя 7, один из выходов которого, например 8, подключен с помощью трубопровода 10 к поршневым полостям 11 двух гидроцилиндров 12 и 13 поворота стрелы 31, а другой 9 с помощью трубопровода 14 к поршневой полости 15 гидроцилиндра 16 поворота рукояти 32, при этом их штоковые полости 17 и 18 сообщены между собой трубопроводом 19, причем выходы 8 и 9 золотника 6 сообщены линиями связи 20 и 21 с выходами 22 и 23 реверсивных золотников 24 и 25 раздельного управления, вторые выходы 26 и 27 которых подключены к трубопроводу 19 с помощью общего трубопровода 28. В трубопроводах 10 и 14 установлены тормозные клапаны 29. Рабочий орган обозначен позицией 30.
Гидропривод управления рабочими органами манипулятора работает следующим образом. В нейтральном положении золотники 6, 24, 25 соединяют выход 4 источника питания 1 с баком рабочей жидкости 3. Для переноса рабочего органа 30, например захвата для лесоматериалов или экскаваторного ковша из одной точки, например А, в другую точку, например В, переводят золотник 6 в правую по чертежу сторону, рабочая жидкость от источника питания 1 через выход 8, обратный клапан тормозного клапана 29, магистральный трубопровод 10 поступает в полости 11 гидроцилиндров 12 и 13 поворота стрелы 31, а из полостей 17 по трубопроводу 19 вытесняется поршнем в полость 18 гидроцилиндра 16 поворота рукояти 32 и движением поршня вытесняется из полости 15 по трубопроводу 14, дроссель тормозного клапана, через выход 9 в бак рабочей жидкости 3.
В результате стрела 31 поворачивается против часовой стрелки, а рукоять 32 по часовой, при этом рабочий орган 30 совершает в пространстве поступательное перемещение по траектории, приближающейся к прямой АВ. Причем полный угол (α) поворота рукояти, соответствующий ходу гидроцилиндра 16, осуществляется при одинаковых диаметрах поршней гидроцилиндров поворотом стрелы на угол, равный половине угла (α/2) поворота рукояти или половине хода гидроцилиндров стрелы. При одинаковых ходах гидроцилиндров 12, 13, 16 оставшийся ход гидроцилиндров 12, 13 используется на дополнительный поворот стрелы без поворота рукояти для ориентации рабочего органа по высоте. Для чего золотник 24 перемещают из нейтральной позиции в ту или иную по чертежу сторону, например в правую. В этом случае рабочая жидкость от источника питания 1 по линии связи 20 через выход 8, обратный клапан тормозного клапана 29, трубопровод 10 поступает в полости 11 гидроцилиндров 12, 13, а из полостей 17 движением поршня по общему трубопроводу 28 через выход 26 золотника 24 сливается в бак рабочей жидкости 3, а стрела 31 поворачивается по чертежу против часовой стрелки, производя подъем захвата 30 на требуемую высоту.
При перемещении золотника 24 в левую сторону стрела поворачивается по часовой стрелке, опуская захват. Такая схема гидропривода может быть использована в погрузочных манипуляторах, например, для штабелевки длинномерных лесоматериалов.
При перемещении золотника 25 из нейтрального положения в правую или левую по чертежу сторону раздельно управляют гидроцилиндром 16 поворота рукояти 32. В отличие от описанного выше выход 23 золотника 25 сообщен с помощью линии связи 21 с выходом 9 золотника 6. Поэтому при перемещении золотника 25, например, в правую по чертеже сторону, рабочая жидкость от источника питания 1 через выход 23 по линии связи 21, выход 9, магистральному трубопроводу 14, через обратный клапан тормозного клапана 29 поступает в полость 15 гидроцилиндра 16, а движением поршня она вытесняется из полости 18 по трубопроводам 19 и 28, через выход 27 сливается в бак рабочей жидкости 3. Схема гидропривода при совместном применении золотников 6, 24 и 25 может быть использована в манипуляторе одноковшового экскаватора, которая позволяет в технологическом процессе осуществлять перенос ковша в забой или из забоя с помощью одного золотника, что расширяет функциональные возможности манипулятора, повышает производительность экскаватора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод лесозаготовительных машин манипуляторного типа | 1991 |
|
SU1805226A1 |
| ГИДРАВЛИЧЕСКИЙ МАНИПУЛЯТОР | 1989 |
|
RU2014212C1 |
| СПОСОБ УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ РАБОЧЕГО ОРГАНА ГРУЗОПОДЪЕМНОГО УСТРОЙСТВА | 1992 |
|
RU2008199C1 |
| Гидропривод землеройной машины | 1980 |
|
SU1036862A1 |
| СПОСОБ УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ МАНИПУЛЯТОРОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1986 |
|
RU2028929C1 |
| Гидравлический привод одноковшового экскаватора | 1980 |
|
SU933900A1 |
| Двухпоточный гидравлический привод экскаватора | 1981 |
|
SU968231A2 |
| Гидропривод одноковшового экскаватора | 1986 |
|
SU1308722A1 |
| Гидропривод одноковшовного экскаватора | 1974 |
|
SU541946A1 |
| Гидропривод экскаватора | 1980 |
|
SU949090A1 |
Использование: рабочие органы манипуляторов, в частности гидропривод одноковшовых экскаваторов. Сущность изобретения: гидропривод управления содержит источник питания, вход которого подсоединен к баку рабочей жидкости, а выход к входу золотника реверсивного распределителя. Один из выходов распределителя подключен к поршневым полостям гидроцилиндров поворота стрелы, а другой к поршневой полости гидроцилиндра поворота рукояти. Штоковые полости гидроцилиндров сообщены между собой. Реверсивный распределитель имеет два золотника с раздельным управлением. Один из выходов одного из золотников с раздельным управлением соединен с одним из выходов второго золотника с раздельным управлением и через общий трубопровод сообщен с трубопроводом, соединяющим штоковые полости гидроцилиндров. Второй выход первого золотника с раздельным управлением подключен к выходу золотника реверсивного распределителя. Второй выход второго золотника с раздельным управлением присоединен к другому выходу золотника реверсивного распределителя. 2 ил.
ГИДРОПРИВОД УПРАВЛЕНИЯ РАБОЧИМИ ОРГАНАМИ МАНИПУЛЯТОРА, содержащий источник питания, вход которого подсоединен к баку рабочей жидкости, а выход - к входу золотника реверсивного распределителя, один из выходов которого подключен с помощью магистрального трубопровода к поршневым полостям гидроцилиндров поворота стрелы, а другой к поршневой полости гидроцилиндра поворота рукояти, при этом их штоковые полости сообщены трубопроводом между собой, отличающийся тем, что реверсный распределитель снабжен двумя золотниками с раздельным управлением, при этом один из выходов одного из золотников с раздельным управлением соединен с одним из выходов второго золотника с раздельным управлением и через общий трубопровод сообщен с трубопроводом, соединяющим штоковые полости гидроцилиндров поворота стрелы и рукояти, причем второй выход первого золотника с раздельным управлением подключен к выходу золотника реверсивного распределителя, а второй выход второго золотника с раздельным управлением присоединен к другому выходу золотника реверсивного распределителя подключенному к поршневой полости гидроцилиндра поворота рукояти.
| Способ управления рабочим органом грузоподъемного устройства | 1985 |
|
SU1346420A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
