Изобретение относится к автомобильной технике, преимущественно к средствам автоматизации управления движением автомобилей, и может быть использовано для оптимизации управления торможением специальных однотипных автотранспортных средств, в частност и, при колонном движении.
Цель изобретения - повышение безопасности движения.
На фиг.1 предстаплена общая блок-схема устройства для автоматического управления торможением автомобиля на фиг.2 - схема блока расчета оптимального замедления автомобиля; на фиг.З - схема контроллера экстренного режима и коммутатора
Обозначения на фиг.: Vi - скорость впереди идущего автомобиля, /2 - собственная скорость, /з - скорость следующего сзади автомобиля, Vi2 - скорость относительно впереди идущего автомобиля, V23 - скорость относительно сзади следующего автомобиля, J1 - установившееся замедление переднего автомобиля, J2om - оптимальное собственное замедление, jnp - пороговое замедление, Si2 - расстояние до переднего автомобиля, Заз - расстояние до заднего автомобиля.
Устройство для автоматического управ- лэиия торможением автомобиля в потоке (фиг.1) содержит переднки 1 и задний 2 локационные датчики, каждый из КОТОРЫХ имеет два выхода: д; я сигналов дистанции Si2 до впереди идущею автомобиля и относительной скорости Vi2 с ним датчика 1 и сигналов дистанции 8зз до сзади следующего автомобиля и относительной скорости V23 с ним для датчика 2 Выход сигнала Vi2 относительной скорости переднего датчика 1 подсоединен к инверсному входу первого сумматора 3, а выход сигнала V23 относительной скорости -к прямому входу второго сумматора 4. Выход датчика 5 собственной скорости подключен к прямым входам сумматоров 3 и 4, а также к четвертому входу блока 6 расчета оптимального замедления, к первому входу которого подключен выход сигнала дистанции S12 переднего датчика 1 к второму - выход сигнала дистанции S23 заднего датчика 2, к третьему - выход сум матора 3 (сигнал скорости Vi), к пятому - выход сумматора 4 (сигнал скорости з) К первому входу комм/гатора 7 подсоединен выход блока 6 расчета, к второму - выхо/., котроллера 8, вход которого связан с выходом первого сумматора 3. Выход коммутатора 7 СВЯЗЕЙ с исполнительным механизмом 9 замедления и сигнализатором 10.
Блок 6 расчета содержит (фиг 2) четь ре квадратора 11-14, входы которых обэаз ют
соответствующие (с первого по пятый) входы блока 6, а выходы квадраторов подключены соответственно к седьмому, восьмому, девятому и десятому входам выходного сумматора 15 с восемнадцатью входами, выход которого образует выход блока G. Первый вход Ьлока 6 расчета, образованный входами первого квадратора 11,связан с первыми входами первого 16, второго 17 и
0 третьего 18 умножителей, вторые входы которых подсоединены соответственно к второму, четвертому и пятому входам блока 6. В ыходы первого 16, второго 17 и третьего 18 умножителей подключены соответственно к
5 одиннадцатому, двенадцатому и тринадцатому входам выходного сумматора 15 Второй вход блока 6 связан с первыми входами четвертого 19, пятого 20 и, шестого 21 умножителей, вторые входы которых подключе0 ны соответственно к третьему, четвертому и пятому входам блока 6, а выходы - к четырнадцатому, пятнадцатому и шестнадцатому входам выходного сумматора 15, соответственно. Четвертый вход блока 6 связан с пер5 аыми входами седьмого 22 и восьмого 23 умножителей, вторые входы которых подключены к третьему и пятому входам блока 6 соответственно, а выходы - к семнадцатому и восемнадцатому входам выходного
0 сумматора 15 соогветственно. К первому входу выходного сумматора 15 подключен выход делителя 24 напряжения а к входам с второго по шестой - входы блока 6.
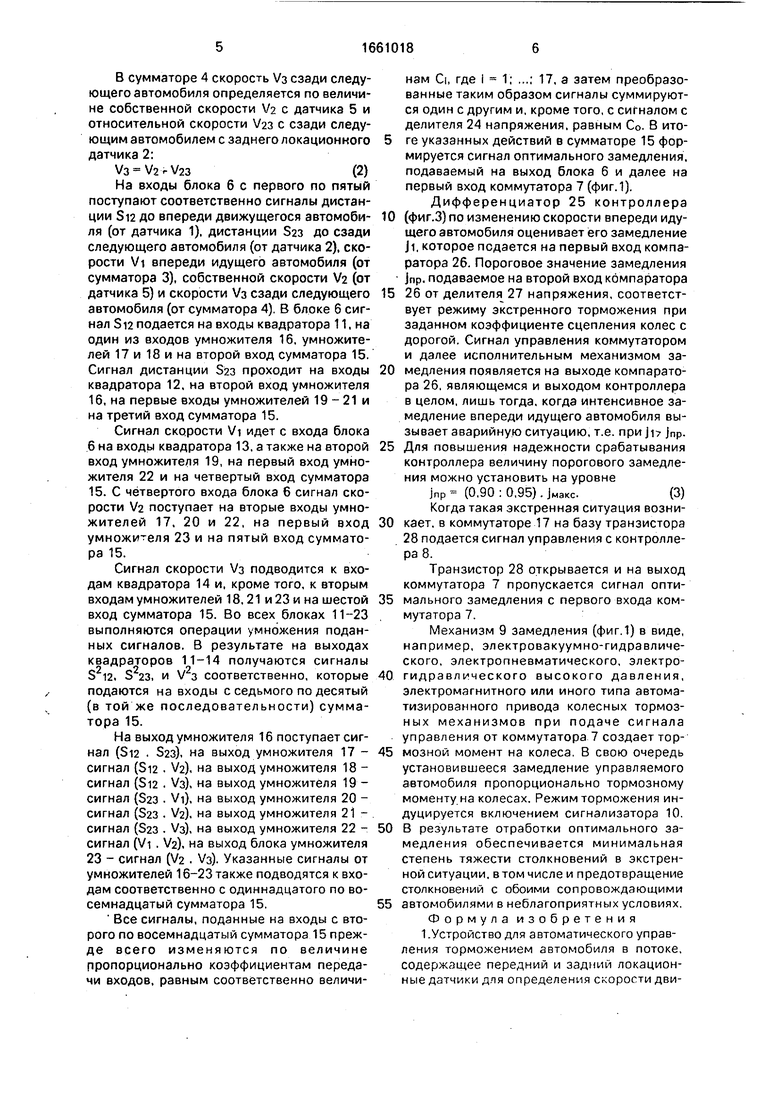
Контроллер 8 содержит дифференциа5 тор 25, вход которого образует вход контроллера 8, а выход связан с первым входом компаратора 26, второй вход которого связан с выходом делителя 27 напряжения. Выход компаратора 26 образует выход
0 контроллера 8 и связан с входом коммутатора 7. Коммутатор 7 выполнен на транзисторе 28 прямой проводимости, с базой которого связан выход контроллера 8, с эмиттером - выход блока 6, а с коллектором 5 выход коммутатора 7,
Исполнительный механизм 9 замедления автомобиля является аппаратом следя- щзго действия.
Устройство работает следующим обра0 зом.
Изменение текущих параметров движения автомобилей (Vi, /2, Vs, 812, 823) непрерывно фиксируется датчиками 1, 2 и 5 (фиг,1). В сумматоре 3 по сигналу относи5 тельнол скорости Via с впереди движущимся автомобилем с переднего локационного датчика 1 и сигналу собственной скорости V(2 с датчика 5 рассчитывается скорость Vi впереди идущего ае- Омобиля
V V2 - Vi2(1)
В сумматоре 4 скорость Vs сзади следующего автомобиля определяется по величине собственной скорости V2 с датчика 5 и относительной скорости V23 с сзади следующим автомобилем с заднего локационного датчика 2:
V3 V2 V23(2)
На входы блока 6 с первого по пятый поступают соответственно сигналы дистанции Si2 до впереди движущегося автомобиля (от датчика 1). дистанции $23 до сзади следующего автомобиля (от датчика 2), скорости Vi впереди идущего автомобиля (от сумматора 3), собственной скорости V2 (от датчика 5) и скорости Уз сзади следующего автомобиля (от сумматора 4). В блоке 6 сигнал Si2 подается на входы квадратора 11, на один из входов умножителя 16, умножителей 17 и 18 и на второй вход сумматора 15. Сигнал дистанции S23 проходит на входы квадратора 12, на второй вход умножителя 16, на первые входы умножителей 19-21 и на третий вход сумматора 15.
Сигнал скорости Vi идет с входа блока 6 на входы квадратора 13, а также на второй вход умножителя 19, на первый вход умножителя 22 и на четвертый вход сумматора 15. С четвертого входа блока 6 сигнал скорости Va поступает на вторые входы умножителей 17. 20 и 22, на первый вход умножителя 23 и на пятый вход сумматора 15.
Сигнал скорости Уз подводится к входам квадратора 14 и, кроме того, к вторым входам умножителей 18,21 и 23 и на шестой вход сумматора 15. Во всех блоках 11-23 выполняются операции умножения поданных сигналов. В результате на выходах квадраторов 11-14 получаются сигналы S 12, S 23, и V з соответственно, которые подаются на входы с седьмого по десятый (в той же последовательности) сумматора 15.
На выход умножителя 16 поступает сигнал (Si2 . 823), на выход умножителя 17 - сигнал (Si2 . V2), на выход умножителя 18 - сигнал (Si2 . Vs), на выход умножителя 19 - сигнал ($23 Vi), на выход умножителя 20 - сигнал (S23 . V2J, на выход умножителя 21 - . сигнал (S23 . Vs), на выход умножителя 22 - сигнал (Vi . V2), на выход блока умножителя 23 - сигнал (V2 . Vs). Указанные сигналы от умножителей 16-23 также подводятся к входам соответственно с одиннадцатого по восемнадцатый сумматора 15.
Все сигналы, поданные на входы с второго по восемнадцатый сумматора 15 прежде всего изменяются по величине пропорционально коэффициентам передачи входов, равным соответственно величинам Ci, где 1 1; ...; 17, а затем преобразованные таким образом сигналы суммируются один с другим и, кроме того, с сигналом с делителя 24 напряжения, равным С0. В ито- 5 ге указанных действий в сумматоре 15 формируется сигнал оптимального замедления, подаваемый на выход блока 6 и далее на первый вход коммутатора 7 (фиг.1).
Дифференциатор 25 контроллера
0 (фиг.З) по изменению скорости впереди идущего автомобиля оценивает его замедление ji, которое подается на первый вход компаратора 26. Пороговое значение замедления jnp. подаваемое на второй вход компаратора
5 26 от делителя 27 напряжения, соответствует режиму экстренного торможения при заданном коэффициенте сцепления колес с дорогой. Сигнал управления коммутатором и далее исполнительным механизмом за0 медления появляется на выходе компаратора 26, являющемся и выходом контроллера в целом, лишь тогда, когда интенсивное замедление впереди идущего автомобиля вызывает аварийную ситуацию, т.е. при ji jnp.
5 Для повышения надежности срабатывания контроллера величину порогового замедления можно установить на уровне
jnp (0,90 : 0,95). макс.(3)
Когда такая экстренная ситуация возни0 кает. в коммутаторе 17 на базу транзистора 28 подается сигнал управления с контроллера 8.
Транзистор 28 открывается и на выход коммутатора 7 пропускается сигнал опти5 мального замедления с первого входа коммутатора 7.
Механизм 9 замедления (фиг.1) в виде, например, электровакуум но-гидравличе- ского, электропневматического, электро0 гидравлического высокого давления, электромагнитного или иного типа автоматизированного привода колесных тормозных механизмов при подаче сигнала управления от коммутатора 7 создает тор5 мозной момент на колеса. В свою очередь установившееся замедление управляемого автомобиля пропорционально тормозному моменту на колесах. Режим торможения индуцируется включением сигнализатора 10.
0 В результате отработки оптимального замедления обеспечивается минимальная степень тяжести столкновений в экстренной ситуации, в том числе и предотвращение столкновений с обоими сопровождающими
5 автомобилями в неблагоприятных условиях. Формула изобретения 1 .Устройство для автоматического управления торможением автомобиля в потоке, содержащее передний и задний локационные датчики для определения скорости движения относительно впереди движущегося автомобиля и относительно следующего сзади автомобиля, а также расстояния до указанных автомобилей, датчик собственной скорости автомобиля, первый сумматор для определения скорости впереди движущегося автомобиля, второй сумматор для определения скорости следующего сзади автомобиля, блок расчета оптимальных условий движения, исполнительный механизм управления замедлением автомобиля и сигнализатор опасности для следующего сзади автомобиля, при этом первый вход блока расчета подключен к выходу переднего локационного датчика, выдающему сигнал, пропорциональный расстоянию, второй вход - к аналогичному выходу заднего локационного датчика, третий вход - к выходу первого сумматора, четвертый вход - к выходу датчика собственной скорости, а пятый вход- к выходу второго сумматора, инверсный вход первого сумматора подключен к выходу переднего локационного датчика, выдающему сигнал, пропорциональный скорости, а второй - к выходу датчика собственной скорости, к которому подключен первый вход второго сумматора, подключенного вторым входом к выходу заднего локационного датчика, выдающему сигнал, пропорциональный скорости, причем блок расчета включает в себя умножители и выходной сумматор.отличающееся тем, что, с целью повышения безопасности движения, оно снабжено коммутатором, через который выходной сумматор блока расчета подключен к исполнительному механизму и сигнализатору, и контроллером экстренного режима, вход которого подключен к выходу первого сумматора, а выход - к управляющему входу коммутатора.
2.Устройство по п.1,отличающееся тем, что блок расчета оптимальных условий движения снабжен делителем напряжения, четырьмя квадраторами и выполнен с восемью умножителями и выходным сумматором с восемнадцатью входами, при этом входы квадраторов соединены соответственно с первым, вторым, третьим и пятым входами блока расчета, первые входы первого, второго и третьего умножителей - с первым входом блока расчета, первые входы четвертого, пятого, шестого и второй вход первого умножителей - с вторым входом блока расчета, второй вход четвертого
и первый вход седьмого умножителей - с третьим входом блока расчета, вторые входы второго, пятого, седьмого, и первый вход восьмого умножителей - с четвертым входом блока расчета, вторые входы третьего,
шестого и восьмого умножителей - с пятым входом блока расчета, а из восемнадцати ходов сумматора первый связан с выходом делителя напряжения, входы с второго по шестой - соответственно с входами блока
расчета с первого по пятый, входы сумматора с седьмого по десятый - с выходами квад- раторов с первого по четвертый соответственно, входы сумматора с одиннадцатого по восемнадцатый - с выходами
умножителей соответственно с первого по восьмой.
3.Устройство по п.1.отличающееся тем, что контроллер экстренного режима включает в себя дифференциатор, делитель
напряжения и компаратор, при этом вход дифференциатора соединен с входом контроллера, выход - с первым входом компаратора, к второму входу которого подключен делитель напряжения, а выход компаратора
является выходом контроллера.
fc.2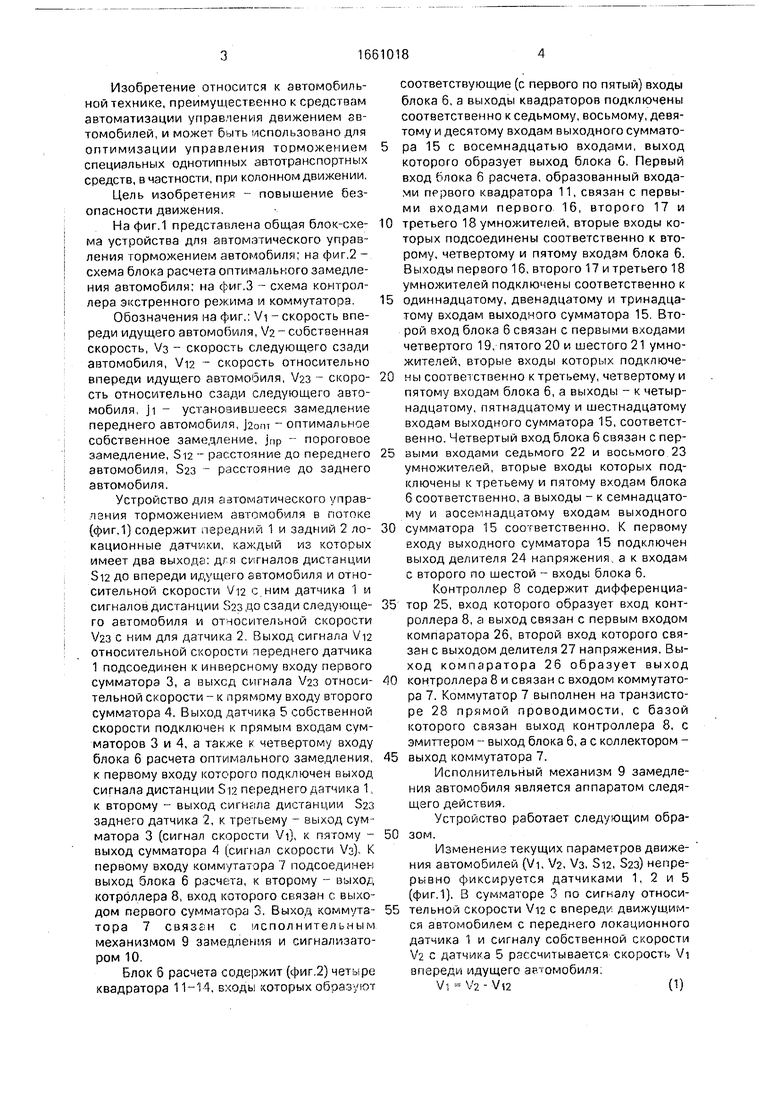
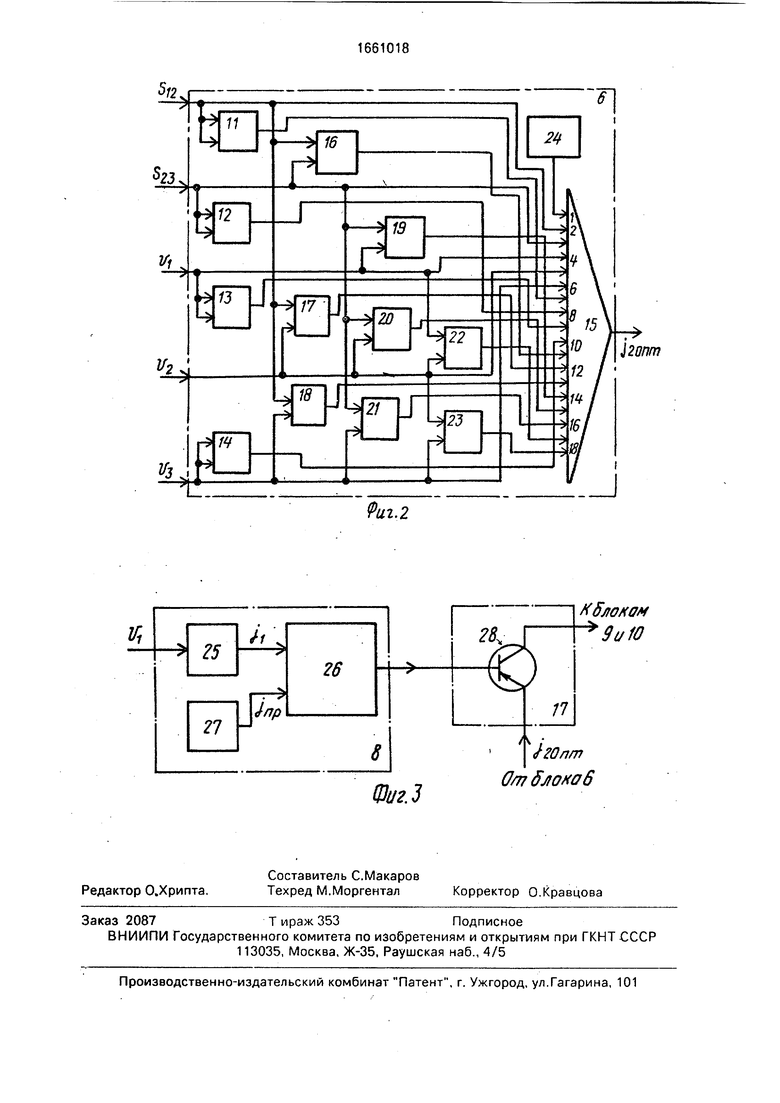
Изобретение относится к системам двунаправленного слежения и автоматизированного управления автомобилем, использующим локационные датчики, и особенно эффективно используется для автомобилей, перевозящих людей, опасные грузы или специальное оборудование. Цель изобретения - повышение безопасности движения путем, во-первых, устранения неравномерности движения автомобиля в неэкстренной ситуации за счет исключения автоматических управляющих воздействий на исполнительные механизмы и, во-вторых, осуществления в экстренных ситуациях торможений с интенсивностью, меньшей максимально возможной по условиям сцепления колес с дорогой. Устройство содержит передний 1 и задний 2 локационные датчики, фиксирующие расстояния и относительные скорости движения по отношению к переднему и заднему автомобилям, блоки определения абсолютных скоростей этих автомобилей в виде сумматоров 3 и 4, датчик 5 собственной скорости, контроллер 8 экстренного режима, блок 6 расчета оптимального замедления автомобиля, коммутатор 7, исполнительный механизм 9 замедления и сигнализатор 10. При движении в блоке 6 непрерывно по величинам скоростей всех трех автомобилей и дистанций до движущихся впереди и сзади автомобилей рассчитывается оптимальное замедление, при котором обеспечивается минимальная тяжесть последствий столкновений автомобиля в экстренной ситуации. Это замедление реализуется лишь тогда, когда контроллер 8 по изменению скорости впереди идущего автомобиля определит превышение его замедления над пороговым значением и выработает сигнал управления коммутатором 7, который пропустит сигнал оптимального замедления на механизм 9 и сигнализатор 10. 2 з.п.ф-лы, 3 ил.
| Устройство для автоматического обеспечения оптимальной дистанции между автомобилями в потоке | 1986 |
|
SU1373594A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
