Изобретение относится к авиационной технике, а более конкретно к самолетам с винтовыми движителями толкающего типа.
Известны различные схемы установки винтов, в том числе толкающего типа, на самолет [1].
В качестве прототипа выбран беспилотный летательный аппарат (ЛА) "Скаут" - свободнонесущий моноплан с высокорасположенным прямым крылом и установленным на двухбалочной конструкции хвостовым оперением. Аппарат оснащен поршневым двигателем, который расположен в хвостовой части гондолы фюзеляжа и приводит в действие толкающий воздушный винт [2].
Такая компоновка благоприятна для размещения и функционирования оптической аппаратуры ЛА.
Запуск "Скаута" осуществляется с мобильной пневматической катапульты, посадка - в вертикальную сеть или по-самолетному.
К существенному недостатку прототипа можно отнести невозможность форсирования характеристик за счет увеличения диаметра воздушного винта без кардинальной перекомпоновки аппарата (разнесения хвостовых балок, увеличения высоты шасси), что ограничивается конструктивно-силовой схемой, балансировочными и противокапотажными возможностями данного ЛА.
Целью изобретения является возможность применения для ЛА указанного типа воздушного винта большого диаметра.
Указанная цель достигается тем, что в предложенном самолете хвостовая балка выполнена в виде трубы, которая крепится к гондоле фюзеляжа посредством силового стержня, снабженного соосными воздушными винтами противовращения. При этом плоскости вращения воздушных винтов разнесены вдоль строительной горизонтали фюзеляжа на 0,05-0,25 диаметра винта, а лопасти винтов могут быть выполнены складывающимися назад относительно направления полета, причем шарнир складывания размещен в корневой части каждой лопасти, угол складывания лопастей первого винта больше угла складывания лопастей второго винта, а длина хвостовой балки больше длины лопастей воздушных винтов. Кроме того, внутренняя поверхность хвостовой балки может быть выполнена в виде цилиндрической ориентирующей трубы, которая представляет собой ответную часть направляющего стержня катапульты.
На фиг. 1 представлена конструктивно-компоновочная схема самолета по предлагаемому техническому решению, раскрывающая связи и взаимное расположение элементов устройства; на фиг. 2- один из возможных вариантов конструктивного закрепления воздушных винтов на силовом стержне; на фиг. 3 - фотография беспилотного ЛА по предлагаемой схеме.
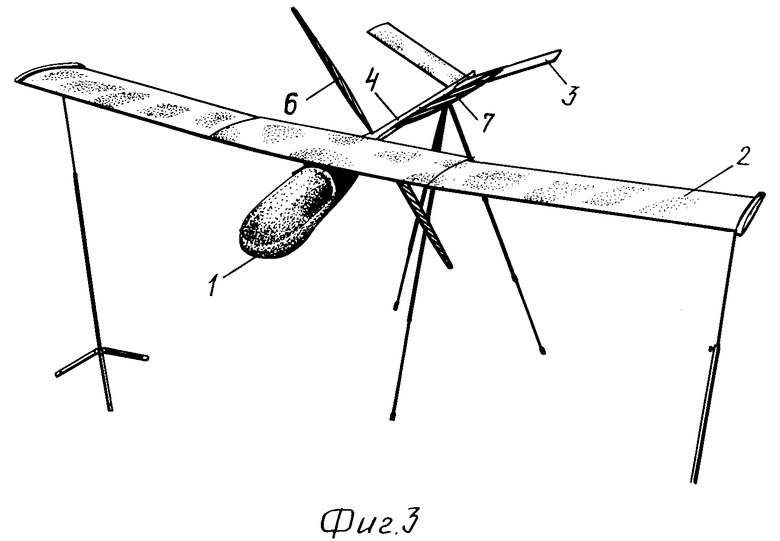
Гондола фюзеляжа 1, крыло 2, оперение 3 на хвостовой балке 4, шасси 5 (на фиг. 1 изображено шасси лыжного типа) в сборе выполнены по нормальной аэродинамической схеме. При этом хвостовая балка 4 крепится к гондоле фюзеляжа 1 посредством силового стержня 9, на который надеты носовой 6 и хвостовой 7 воздушные винты. Расстояние между плоскостями вращения носового 6 и хвостового 7 винтов равно 0,05-0,25 их диаметра (винты равного диаметра). Минимальное расстояние между плоскостями вращения воздушных винтов выбрано из условия исключения перехлеста лопастей в режиме обдува с реализацией наибольших амплитуд колебаний концевых частей лопастей (технологический параметр), а максимальное расстояние - из условия обеспечения разности крутящих моментов на носовом и хвостовом винтах менее 20% (Вождаев В.С. Метод и результаты параметрических исследований аэродинамических характеристик соосной системы винтов на режимах висения и вертикального подъема. М.: Труды ЦАГИ, вып. 1953, 1978, с. 48-50). Угол складывания носового винта 6 (угол между продольной осью лопасти 8 и строительной горизонталью фюзеляжа) - α , хвостового винта 7 - β , при этом α > β .
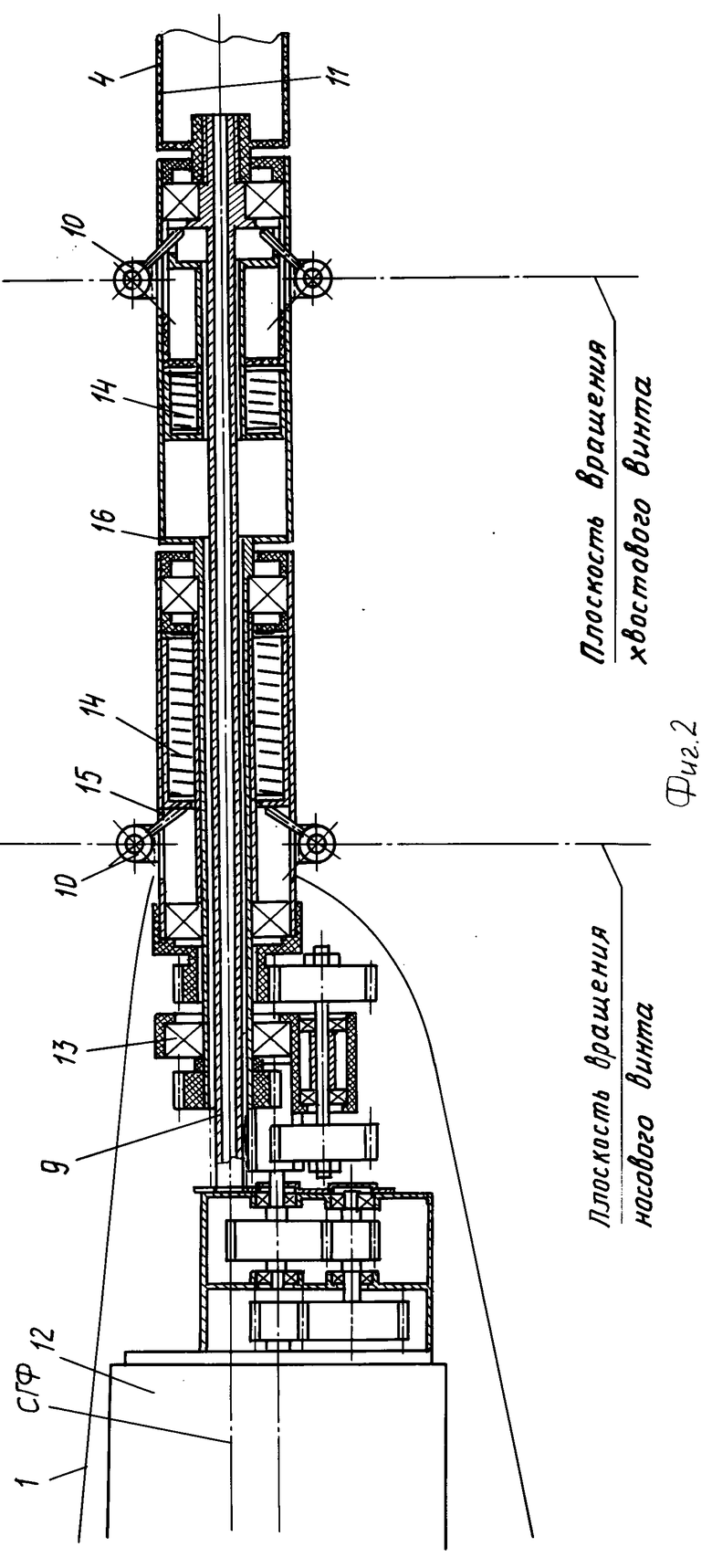
Показанный на фиг. 2 вариант конструктивного закрепления винтов 6 и 7 на силовом стержне 9 предполагает передачу крутящего момента от двигателя 12 через редуктор 13 (показан вариант редуктора на базе прямозубых шестерен и подшипников легкой серии) на соосные ступицы 15 и 16. При этом внутри ступицы может быть размещен пружинный механизм 14 складывания лопастей.
Фотография (фиг. 3) беспилотного самолета по предлагаемому техническому решению позволяет нагляднее представить взаимное расположение основных элементов его конструкции.
Порядок работы устройства следующий. При старте ЛА, например, с катапульты на направляющий стержень последней самолет надвигается ответной частью 11 хвостовой балки 4. За счет придания осевой асимметрии оконечности хвостовой балки 4, входящей в зацепление с разгоняющим башмаком (бугелем) катапульты, обеспечивается фиксация ЛА по крену; требуемые курс и тангаж достигаются соответствующей ориентацией направляющего стержня катапульты в момент разгона.
Маршевый полет ЛА осуществляется традиционным для самолетов с толкающим воздушным винтом способом.
Посадка аппарата осуществляется в сеть либо по-планерному на шасси 5, при этом производится выключение двигательной установки (разобщение вала двигателя и воздушных винтов), складывание лопастей 8 носового 6 и хвостового 7 винтов соответственно до углов α и β посредством набегающего воздушного потока (пружинного механизма 14 складывания лопастей). Складывание каждой лопасти 8 производится относительно шарнира 10, размещенного в ее корневой части с целью минимизировать потери КПД винта.
Предлагаемое техническое решение по сравнению с традиционными ЛА самолетной схемы с толкающими воздушными винтами позволяет получить следующие преимущества;
при равном с прототипом диаметре винтов повысить тягу движителя, в том числе за счет исключения окружных потерь;
упростить балансировку и пилотирование ЛА, поскольку у спаренных винтов обеспечивается симметрия обтекания воздушным потоком элементов конструкции ЛА за винтами (отсутствует реактивный момент), и суммарный гироскопический момент равен нулю (правые и левые маневры ЛА одинаковы);
в принципе снимаются ограничения на диаметр воздушных винтов, что позволяет использовать для ряда специальных задач (например, для высотных или маломощных ЛА) винты сверхбольшого диаметра.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОЛЕТ | 2014 |
|
RU2569165C1 |
| МНОГОЦЕЛЕВОЙ ДИСТАНЦИОННО ПИЛОТИРУЕМЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2008 |
|
RU2370414C1 |
| АВИАЦИОННЫЙ РАКЕТНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ УДАРНЫМ САМОЛЕТОМ-ВЕРТОЛЕТОМ | 2018 |
|
RU2710317C1 |
| ВЫСОКОСКОРОСТНОЙ БЕСПИЛОТНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2010 |
|
RU2464203C2 |
| СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ-АМФИБИЯ | 2017 |
|
RU2655249C1 |
| КРИОГЕННЫЙ ТУРБОЭЛЕКТРИЧЕСКИЙ САМОЛЕТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2013 |
|
RU2534676C1 |
| АВИАЦИОННЫЙ РАКЕТНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ УДАРНЫМ ВЕРТОЛЕТОМ-САМОЛЕТОМ | 2017 |
|
RU2674742C1 |
| БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ, ДЕСАНТИРУЕМЫЙ С САМОЛЕТА-НОСИТЕЛЯ | 2016 |
|
RU2627975C2 |
| ТЯЖЕЛЫЙ МНОГОВИНТОВОЙ ВЕРТОЛЕТ-САМОЛЕТ (ВАРИАНТЫ) | 2012 |
|
RU2492112C1 |
| БЕСПИЛОТНЫЙ КОНВЕРТОПЛАН С АРОЧНЫМ КРЫЛОМ | 2017 |
|
RU2648503C1 |

Изобретение относится к авиационной технике, в частности к самолетам с винтовыми движителями толкающего типа. Сущность изобретения состоит в том, что самолет с фюзеляжем балочной конструкции снабжен балкой в виде трубы, закрепленной на гондоле фюзеляжа, и соосными толкающими воздушными винтами противоположного вращения. При этом плоскости вращения винтов разнесены вдоль строительной горизонтали на 0,05 - 0,25 диаметра воздушного винта, лопасти выполнены складывающимися назад относительно направления полета, а внутренняя поверхность хвостовой балки выполнена в виде трубы и представляет собой ответную часть направляющего стержня катапульты. Все это позволяет повысить эффективность движителя, улучшить пилотажные и эксплуатационные характеристики самолета. 3 з.п. ф-лы, 3 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Летательный аппарат "Скаут", БИНТИ ТАСС, N 41 (2495), 17.10.90, с.39-42. | |||
