Изобретение относится к авиационной технике, в частности к выпуску, уборке и захвату объектов, буксируемых на гибкой связи, преимущественно с помощью кабель-тросов, синтетических канатов и т.п. и может быть использовано при буксировке объектов различного назначения на одном канате.
Известно устройство для выпуска-уборки буксируемого объекта, содержащее привод, размещенный на буксировщике и связанный через канат с подвесным узлом буксируемого объекта, и приспособление для захвата подвесного узла буксируемого объекта [1]
Недостатком данного устройства является низкая безопасность выпуска-уборки буксируемого объекта из-за размещения устройства в зоне действия возмущений от буксировщика и его элементов, например струй от двигателей, и низкая надежность при выпуске-уборке кабель-тросов (синтетических тросов) из-за трения в узлах приспособления для захвата подвесного узла буксируемого объекта.
Наиболее близким по технической сущности является устройство для выпуска-уборки буксируемого объекта, содержащее узел самоориентирования объектов, выполненный в виде основания, соединенного с буксировщиком посредством шарнирных звеньев и закрепленного на основании приспособления с окном для направления объекта, подвесной узел буксируемого объекта, кинематически связанный через канат с приводом, размещенным на буксировщике [2]
Данное устройство обладает достаточной безопасностью выпуска-уборки за счет размещения устройства в зоне невозмущенного потока и снабжения его средством самоориентирования убираемого объекта, однако, как и аналог, имеет низкую надежность при выпуске-уборке буксируемого объекта из-за трения каната (его внешней оплетки) в приспособлении для направления объекта и возможности его зацепления в местах стыка цилиндрических роликов вышеуказанного приспособления. Кроме того, оплетка каната при его выпуске-уборке может быть нарушена, благодаря чему возможно ее сдирание по всей длине, что нарушает целостность каната и снижает надежность всей системы в целом.
Техническим результатом изобретения является повышение надежности работы устройства за счет исключения заедания и истирания каната.
Указанный технический результат достигается тем, что устройство для выпуска-уборки буксируемого объекта, содержащее узел самоориентирования объекта, выполненный в виде основания, соединенного с буксировщиком посредством шарнирных звеньев и закрепленного на основании приспособления с окном для направления объекта, подвесной узел буксируемого объекта, кинематически связанный через канат с приводом, размещенным на буксировщике, согласно изобретению снабжен узлом ограничения положения каната в окне приспособления для направления объекта, закрепленном на основании.
Кроме того, узел ограничения положения каната в окне приспособления для направления объекта выполнен в виде ролика, закрепленного с возможностью поворота в ограничителе перемещения каната, закрепленном посредством жестких элементов на основании узла самоориентирования объекта с возможностью поворота в продольной плоскости буксировщика.
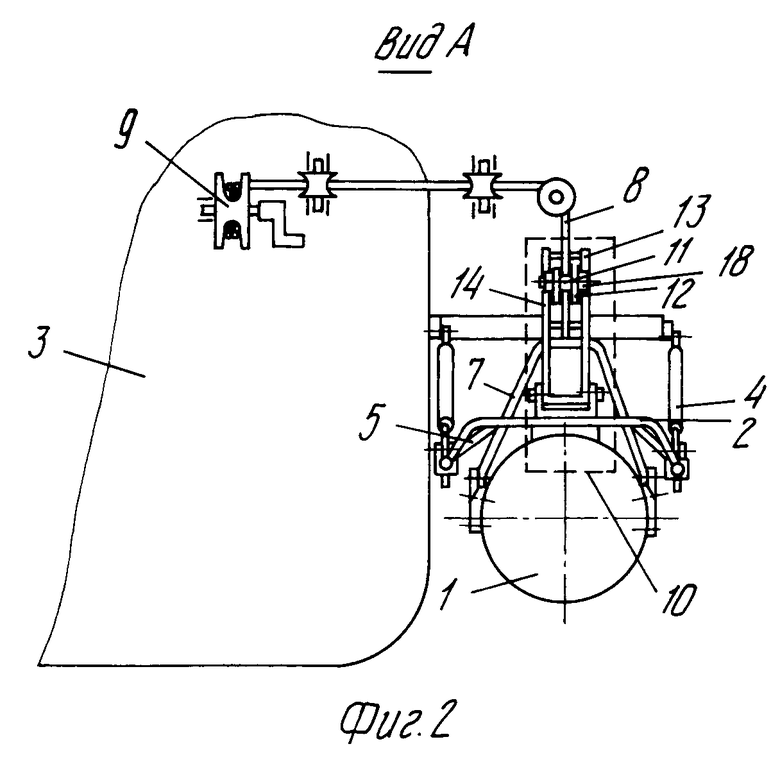
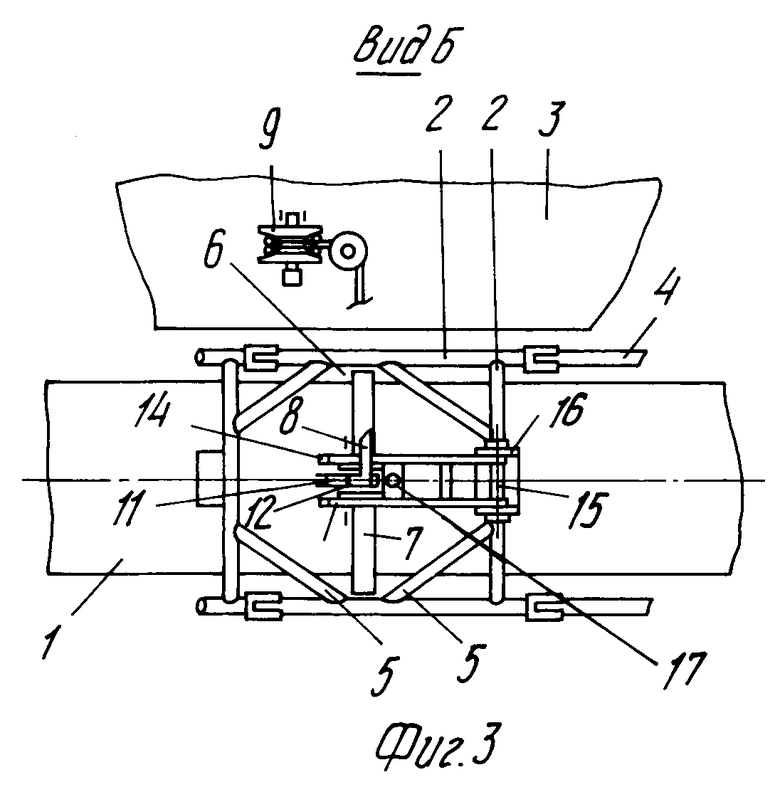
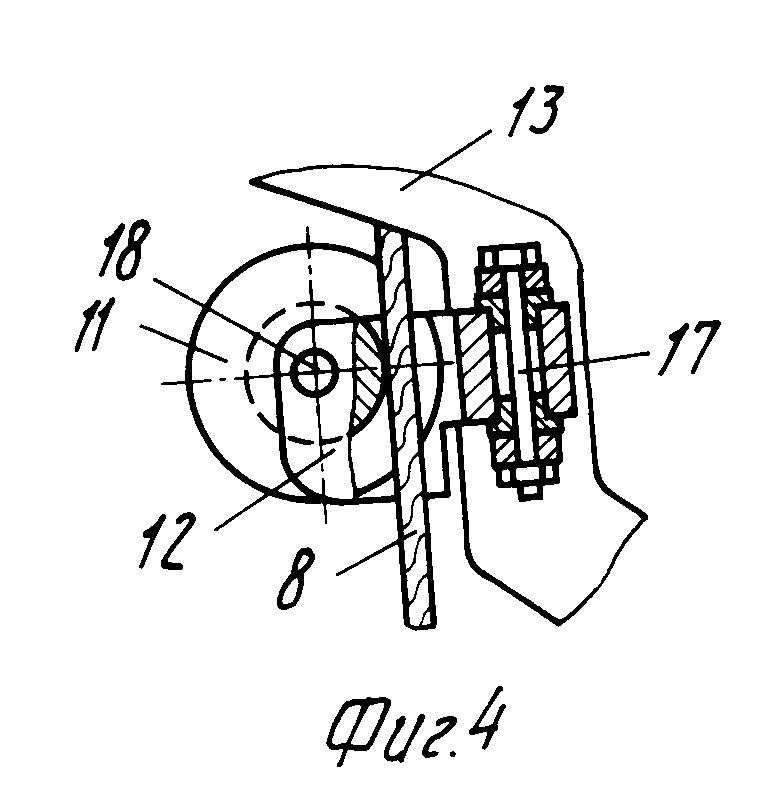
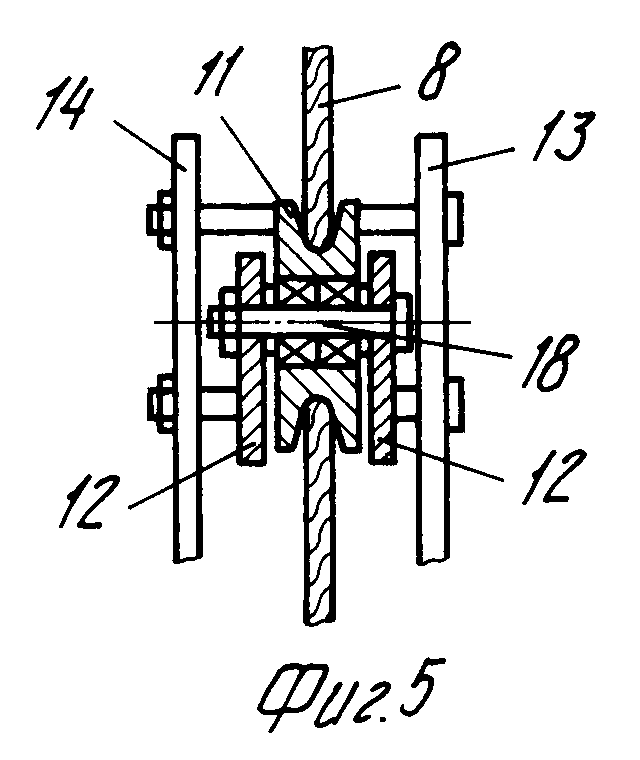
На фиг. 1 изображено устройство в убранном положении; на фиг. 2 вид по стрелке А на фиг. 1; на фиг. 3 вид по стрелке Б на фиг. 1; на фиг. 4 и 5 - конструкция узла ограничения положения каната.
Устройство для выпуска-уборки буксируемого объекта содержит узел самоориентирования объекта 1, выполненный в виде основания 2 прямоугольной формы, соединенного с буксировщиком 3, например летательным аппаратом посредством шарнирных звеньев 4, и закрепленного на основании 2 приспособления 5 с окном 6 для направления объекта 1, подвесной узел 7 буксируемого объекта 1, кинематически связанный через канат 8 с приводом 9, размещенным на буксировщике 3. Устройство также снабжено узлом 10 ограничения положения каната в окне 6 приспособления для направления объекта 1, закрепленном на основании 2.
Узел 10 ограничения положения каната в окне 6 приспособления для направления объекта выполнен в виде ролика 11, закрепленного с возможностью поворота в ограничителе 12 перемещения каната, закрепленном посредством соединенных между собой жестких элементов в виде щек 13 и 14 на основании 2 узла самоориентирования объекта 1 с возможностью поворота в продольной плоскости буксировщика 3.
Приспособление 5 для направления объекта 1 выполнено, например, в виде четырех труб, приваренных к соответствующим сторонах прямоугольного основания 2.
Щеки 13 и 14 вращаются вместе с роликом 11 и ограничителем 12 перемещения каната вокруг оси 15, закрепленной в кронштейне 16, который в свою очередь закреплен на одной из сторон основания 2.
Между щеками 13 и 14 на оси 17 закреплен ограничитель 12 перемещения каната, который вместе с роликом 11 может поворачиваться в боковой плоскости буксируемого объекта 1.
Ролик 11 выполнен с возможностью вращения вокруг оси 18, закрепленной в ограничителе 12 перемещения каната.
Звенья и элементы кинематической связи привода 9 с подвесным узлом 7 буксируемого объекта 1 крепятся на внешней раме и самом буксировщике 3.
Устройство работает следующим образом.
Для выпуска буксируемого объекта 1 привод 9, например ручная лебедка, снимается с тормоза, канат 8 по мере вращения барабана лебедки разматывается, и буксируемый объект 1 под действием собственного веса и аэродинамических сил начинает перемещаться вниз относительно буксировщика 3. Одновременно с перемещением буксируемого объекта 1 опускается основание 2 с приспособлением 5 для направления объекта 1 за счет вращения шарнирных звеньев 4. Узел самоорентирования объекта 1 опускается вниз до момента отделения от него буксируемого объекта 1 и подвесной узел 7 буксируемого объекта 1 выходит из окна 6 приспособления 5 для направления объекта 1. Причем узел самоориентирования объекта 1 начинает перемещаться в режиме слежения за перемещением буксируемого объекта 1, так как усилие от каната 8 передается через ролик 11, ограничитель 12 и жесткие элементы 13 и 14 на основание 2. Причем канат 8 взаимодействует лишь с роликом 11 и ограничителем 12. Боковые колебания буксируемого объекта 1 воспринимаются без трения благодаря повороту ограничителя 12 вокруг оси 17, закрепленной в элементах 13 и 14. Уборка буксируемого объекта 1 осуществляется путем намотки каната 8 на барабан привода 9 также, как в прототипе за исключением того, что канат 8 не касается основания 2 и приспособления 5 для направления объекта 1.
Предложенное устройство для выпуска-уборки буксируемого объекта позволяет повысить надежность работы устройства за счет исключения заедания и истирания каната, выполненного из неметаллического материала или в виде кабель-троса.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВЕСНОЕ УСТРОЙСТВО | 1995 |
|
RU2094322C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ БУКСИРУЕМОГО ТЕЛА | 1992 |
|
RU2006429C1 |
| Устройство для уборки буксируемых тел | 1987 |
|
SU1459156A1 |
| Буксируемая плоская система | 1989 |
|
SU1835372A1 |
| Устройство для буксировки измерителя магнитного поля | 1990 |
|
SU1770930A1 |
| Устройство для буксировки и выпуска - уборки буксируемого тела | 1991 |
|
SU1749124A1 |
| Буксируемая система | 1991 |
|
SU1810235A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПОТОКА В ОБЛАКАХ | 1992 |
|
RU2015072C1 |
| Буксируемая плоская система | 1989 |
|
SU1835373A1 |
| Буксируемая мишень для имитации летательных аппаратов | 1990 |
|
SU1837036A1 |
Изобретение относится к авиационной технике и может быть использовано при буксировке объектов различного назначения на гибкой связи. Сущность изобретения: устройство для выпуска-уборки буксируемого объекта содержит узел самоориентирования объекта, состоящий из основания с шарнирными звеньями для крепления к буксировщику и приспособления с окном для направления объекта, подвесной узел буксируемого объекта, канат привод, узел ограничения положения каната в окне приспособления для направления объекта. 1 з.п. ф-лы, 5 ил.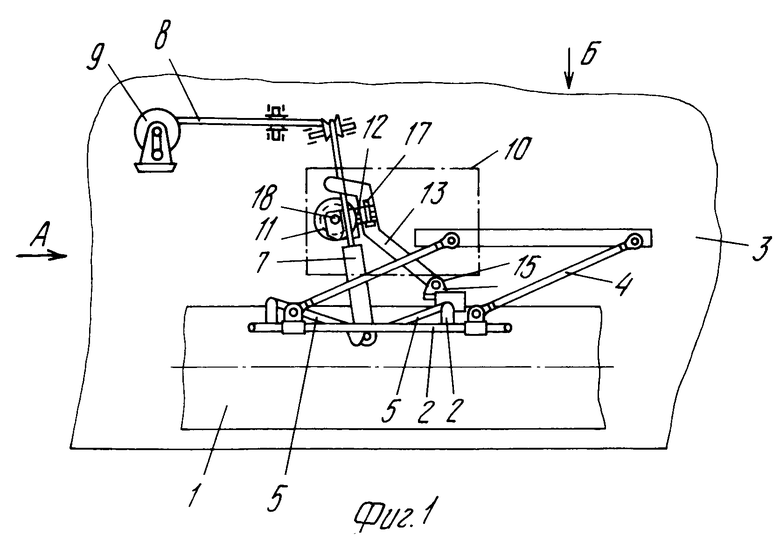
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент Франции N 1336769, кл.B 64D 1/00, 1962 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для уборки буксируемых тел | 1987 |
|
SU1459156A1 |
