Изобретение относится к транспортирующим устройствам.
Для автоматизации промышленного производства и складов необходимо иметь разнообразные транспортирующие устройства, способные работать в разных и постоянно изменяющихся условиях манирулирования изделиями. К изменяющимся параметрам, требующим гибкости от систем перемещения изделий, относятся изменяющиеся размеры комплектов, изменяющийся вес перемещаемых грузов, а также изменяющиеся размеры изделий. Кроме того, от таких систем требуются относительная большая точность перемещения изделий и установки их в нужное место. Под обеспечением такой точности имеется в виду, что транспортирующее устройство перемещает каждое изделие точно в соответствии с намеченной траекторией и устанавливается так, что реальное положение устройства точно соответствует его заданному положению.
Известны транспортирующие устpойства типа роботов, которые удовлетворяют упомянутым требованиям.
Однако такие устройства очень дороги. Другим недостатком устройств типа роботов является то, что они могут перемещать лишь относительно небольшие массы.
Известно транспортирующее устройство типа мостового крана (прототип), содержащее пару параллельно расположенных рядом горизонтальных мостовых балок, пару мостовых кареток, снабженных приводом и установленных на мостовых балках с возможностью перемещения вдоль них, пару параллельно расположенных рядом горизонтальных транспортирующих балок, проходящих под прямыми углами к мостовым балкам и установленных на мостовых каретках, пару транспортирующих кареток, снабженных приводом и установленных на транспортирующих балках с возможностью перемещения вдоль них, подъемную раму, смонтированную на транспортирующих каретках, подъемной устройство, снабженное приводом и установленное на подъемной раме с возможностью перемещения по вертикали, причем каждая пара кареток содержит удлиненный тяговый элемент для перемещения каретки.
Однако это устройство характеризуется низкой точностью перемещения изделий и установки их в нужное место.
Целью изобретения является устранение указанных недостатков.
Указанная цель достигается тем, что в известном устройстве балки выполнены с коробчатым сечением, каретки - с натяжными средствами, а тяговые органы прикреплены к каретке и размещены по крайней мере частично внутри соответствующих им балок.
Тяговый элемент может быть выполнен в виде клинового ремня. Тяговый элемент может представлять собой и любой другой известный в технике вытянутый тяговый элемент, такой как цепь, трос и т.п. Использование клинового ремня в данном случае оказывается предпочтительным, так как предотвращает какое-либо проскальзывание между возвратными шкивами и ремнем, обеспечивая высокую точность перемещения. Кроме того, клиновый ремень бесшумен и прост в обслуживании.
Мостовая каретка может содержать ролики, расположенные внутри мостовой балки и несущие мостовую каретку, которая подвешена к указанным роликам.
Транспортирующая каретка может содержать ролики, расположенные внутри транспортирующей балки и несущие транспортирующую каретку, которая подвешена к указанным роликам. Благодаря перемещению роликов внутри балки обеспечивается безопасность устройства, части которого не могут отделиться друг от друга ни при каких обстоятельствах.
Привод может быть соединен с возвратным шкивом.
Транспортирующее устройство может содержать первый датчик для определения положения мостовых кареток, второй датчик для определения положения транспортирующих кареток, третий датчик для определения положения подъемного устройства и устройстве управления для обработки сигналов указанных датчиков и управления перемещением транспортирующего устройства.
Первый, второй и третий датчики выполнены в виде генераторов импульсов, предпочтительно оптических, шагового типа, для подачи сигналов на устройство управления. С помощью датчиков устройство управления обеспечивает точное управление перемещения частей транспортирующего устройства. Устройство управления определяет с помощью датчиков положение частей транспортирующего устройства в трех направлениях и обеспечивает управление его перемещениями в соответствии с заданной программой.
Подъемное устройство содержит вертикальную балку, снабженную параллельными направляющими рельсами, закрепленными с противоположных сторон, подъемная рама содержит группы направляющих роликов, при этом направляющие рельсы и группы направляющих роликов расположены так, что совместно задают вертикальной балке вертикальное направление перемещения.
Группа направляющих роликов содержит два боковых ролика, которые опираются на направляющий рельс с обеих сторон и оси вращения которых расположены эксцентрично относительно осей их крепления, поворачивая которые можно регулировать зазор между направляющим рельсом и боковыми роликами. Таким образом, зазор между направляющими рельсами вертикальной балки и боковыми роликами может быть сведен к минимуму, что уменьшает до минимума нежелательные боковые перемещения вертикальной балки относительно подъемной рамы.
Подъемное устройство содержит соединенную с вертикальной балкой и параллельную ей цепь и аналогичный ей элемент, тяговое колесо, связанное с целью зубчатой передачей, и привод для вращения тягового колеса.
Тяговое колесо расположено на расстоянии от вертикальной балки, подъемное устройство содержит отклоняющие ролики для отклонения цепи в сторону тягового колеса. Такая конструкция позволяет не размещать тяговое колесо близко к вертикальной балке и устранить влияние габаритных ограничений при выборе привода и передаточных отношений.
Приводы могут быть выполнены в виде короткозамкнутых асинхронных двигателей.
Приводы могут быть выполнены в виде короткозамкнутых асинхронных двигателей, управляемых по частоте вращения посредством преобразователей частоты. В процессе перемещения изделий целесообразно замедлять перемещения частей транспортирующего устройства непосредственно перед его остановкой с тем, чтобы эта остановка с максимальной точностью соответствовала заданной точке.
Пространство внутри вертикальной балки и подъемной рамы образует ваккумную камеру для поддержания вакуума для приведения в действие рабочего органа, имеющего вакуумный привод. Рабочий орган может представлять собой, например, вакуумный зажим, вакуумная камера в этом случае необходима для удержания изделия и предотвращения его неожиданного падения в неподходящий момент, например в случае пропадания напряжения в сети. Использование пространства внутри вертикальной балки или подъемной рамы для образования вакуумной камеры обеспечивает получение компактной конструкции, не требующей наличия специальной отдельной вакуумной камеры, которая увеличила бы вес конструкции и усложнила бы ее. Рабочий орган, соединенный с транспортирующим устройством, может, конечно, иметь и любую другую подходящую конструкцию.
Изобретение основано на том, что используя комбинацию частей обычного крана, можно создать транспортирующее устройство для перемещения изделий в трех направлениях, с помощью которого можно достичь одновременно хорошей точности как перемещения изделий, так и установки их в заданное место. В то же время себестоимость устройства составляет лишь небольшую часть себестоимости известного устройства типа робота. Достоинством изобретения является то, что устройство, позволяющее автоматически осуществлять подъем и перемещение относительно большой массы, может быть изготовлено без больших затрат. Другим достоинством является высокая точность перемещения изделий и установки их в нужное место. Кроме того, изобретение позволяет создать транспортирующее устройство, имеющее простую конструкцию и практически не требующее технического обслуживания.
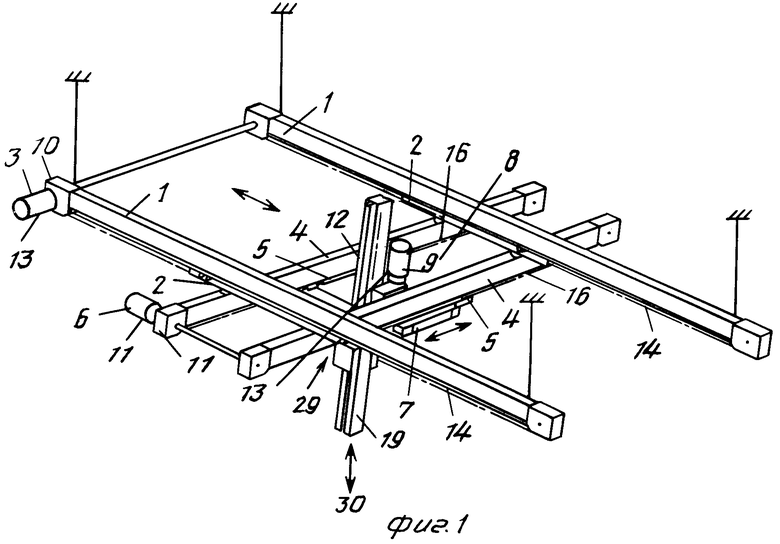
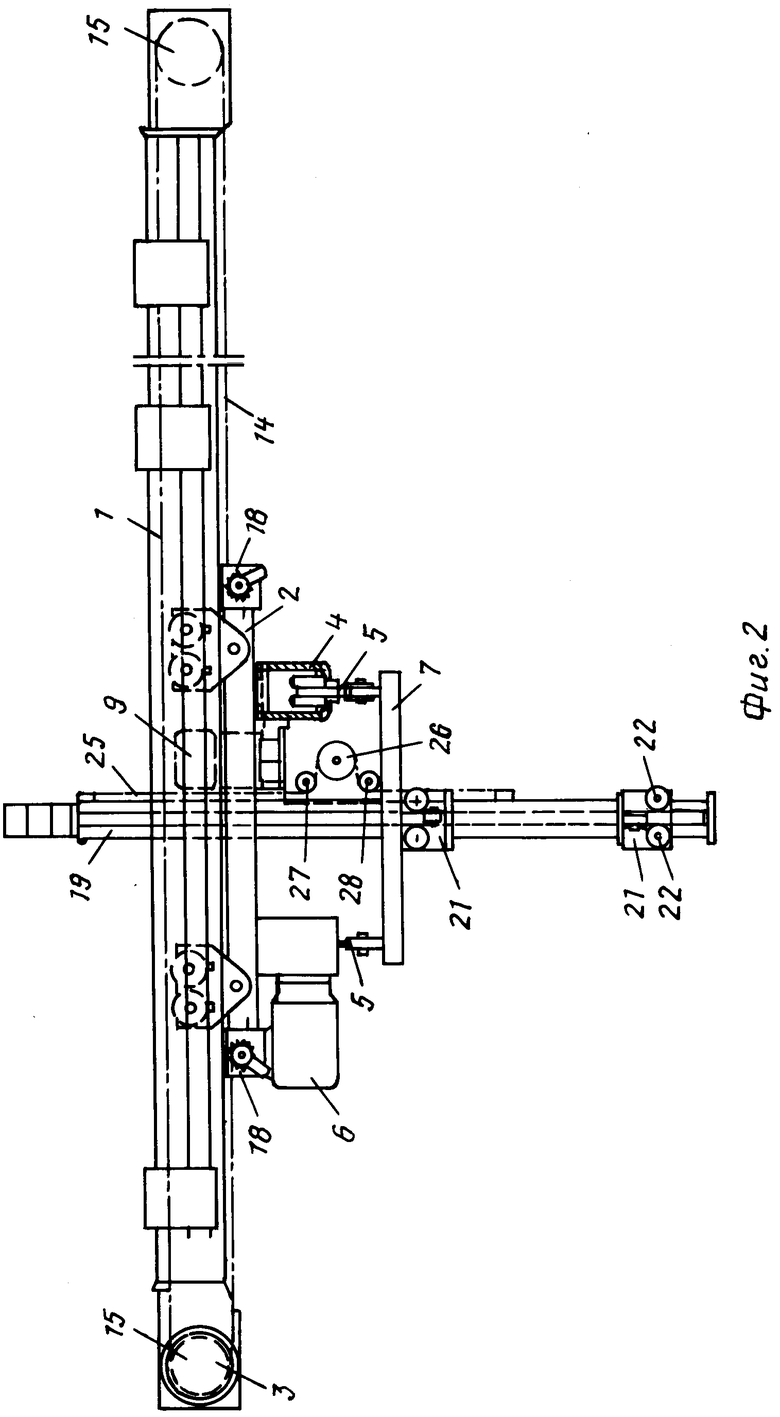
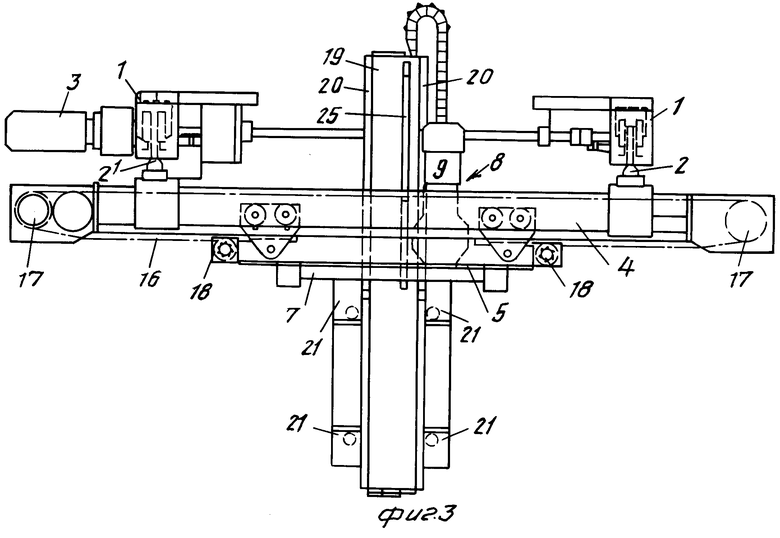
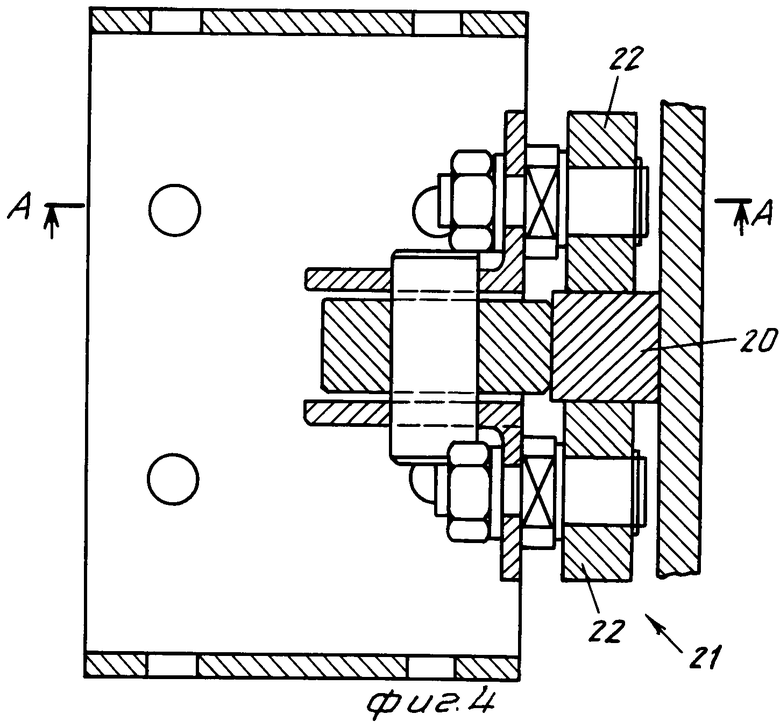
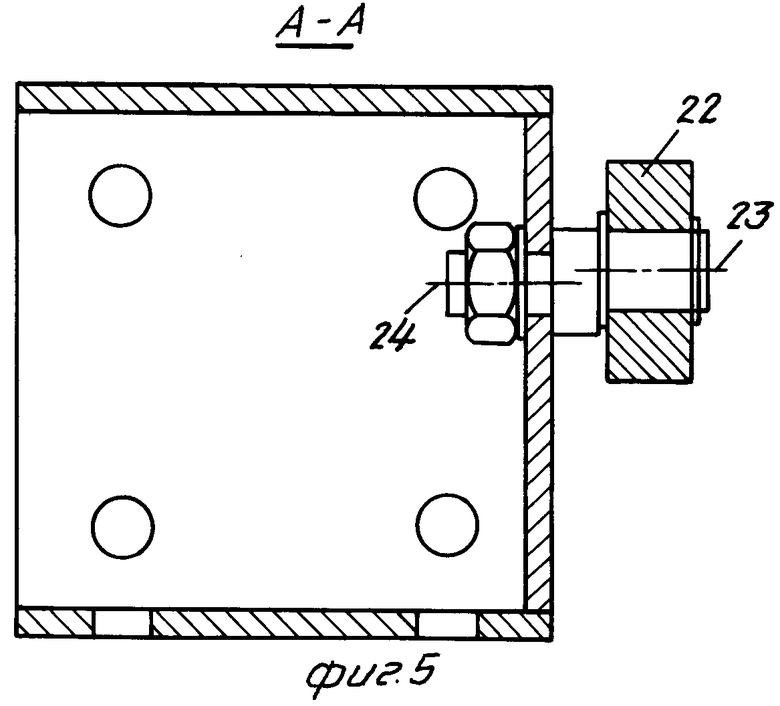
На фиг.1 изображено транспортирующее устройство, вид сверху; на фиг.2 - вертикальная проекция транспортирующего устройства, выполненного согласно варианту выполнения изобретения; на фиг.3 - то же, вид спереди; на фиг.4 - вид сверху в разрезе узла направляющих роликов подъемного устройства согласно еще одному варианту выполнения; на фиг.5 - сечение А-А на фиг.4.
Устройство (фиг. 1) содержит две расположенные рядом, параллельные горизонтальные мостовые балки 1, две мостовые каретки 2, снабженные первым приводом 3 и установленные на мостовых балках 1 с возможностью перемещения вдоль них, две расположенные рядом, параллельные горизонтальные транспортирующие балки 4, проходящие под прямыми углами к мостовым балкам 1 и установленные на мостовых каретках 2, и две транспортирующие каретки 5, снабженные вторым приводом 6 и смонтированные на транспортирующих балках 4 с возможностью перемещения вдоль них. Транспортирующее устройство содержит также подъемную раму 7, установленную на транспортирующих каретках 5, подъемное приспособление 8, снабженное третьим приводом 9 и установленное на подъемной раме с возможностью перемещения в вертикальном направлении, первый датчик 10 положения мостовых кареток 2. датчик 11 положения транспортирующих кареток 5, датчик 12 положения подъемного приспособления 8 и блок 13 для обработки сигналов датчиков 10 - 12 и управления перемещением транспортирующего устройства.
На вертикальной проекции, показанной на фиг.2, изображен удлиненный тяговый элемент 14, которым снабжена мостовая каретка 2. Транспортирующее устройство содержит также два возвратных шкива 15, которые расположены по концам мостовых балок 1 и между которыми находится мостовая каретка 2. Транспортирующее устройство содержит также привод 3 для перемещения тягового элемента 14. Тяговый элемент проходит от мостовой каретки вокруг возвратных шкивов и обратно к мостовой каретке. На фиг.2 тяговый элемент14 показан штрихпунктирной линией.
На фиг. 3 изображен тяговый элемент 16, которым снабжена тpанспортирующая каретка 5. Транспортирующее устройство содержит также два возвратных шкива 17, которые расположены по концам транспортирующих балок 4 и между которыми находится транспортирующая каретка 5. Транспортирующее устройство содержит также привод 6 для перемещения тягового элемента. Тяговый элемент проходит от транспортирующей каретки вокруг возвратных шкивов и обратно к транспортирующей каретке. На фиг.3 тяговый элемент 16 показан штрихпунктирной линией.
Тяговые элементы 14 и 16 выполнены в виде клиновых ремней, которые прикреплены к кареткам 2 и 5 через натяжные средства 18 кареток. Возвратные шкивы 15 и 17 расположены на концах мостовых балок 1 и транспортирующих балок 4. Тяговые элементы 14 и 16 частично проходят внутри соответствующих им балок. Привод 3 соединен с возвратными шкивами на одних концах мостовых балок, которые соединены передаточным валом. Аналогичным образом привод 6 соединен с возвратным шкивом на одном конце транспортирующей балки. Можно, конечно, использовать специальный привод для ведущего шкива на одном конце каждой балки.
Приводы 3 и 6 могут быть выполнены в виде короткозамкнутых асинхронных двигателей, управляемых преобразователями частоты тока, что позволяет оптимальным образом управлять частотой вращения двигателей и скоростью транспортирующего устройства. Например, непосредственно перед установкой изделия в нужное место скорость перемещения уменьшают до небольшой величины с тем, чтобы обеспечить высокую точность остановки изделия в заданной точке.
Мостовые каретки 2 и транспортирующие каретки 5 подвешены к опорным роликам, которые расположены внутри мостовых балок 1 и транспортирующих балок 4.
Подъемное приспособление 8 содержит вертикальную балку 19, снабженную параллельными направляющими рельсами 20, прикрепленными с противоположных сторон (в приведенном примере используются два рельса). Подъемная рама 7 содержит группы 21 направляющих роликов (число таких групп в данном случае равно четырем). Направляющие рельсы 20 и группы 21 направляющих роликов расположены так, что совместно они обеспечивают вертикальное направление перемещения вертикальной балки 19.
Группа 21 направляющих роликов, показанная на фиг.4 и 5, содержит два боковых ролика 22, опирающихся на направляющий рельс 20 с обеих сторон. Оси 23 вращения боковых роликов расположены эксцентрично относительно осей 24 их крепления. Вращая оси 24 крепления, можно регулировать зазор между направляющим рельсом 20 и боковыми роликами 22.
Подъемное приспособление 8 содержит цепь 25 или аналогичный ей элемент. Цепь 25 соединена с вертикальной балкой 19 и параллельна ей. Тяговое колесо 26, которым снабжено подъемное устройство, соединено с цепью зубчатой передачей. Привод 9 служит для привода тягового колеса и предпочтительно выполнен в виде асинхронного двигателя.
Тяговое колесо 26 расположено на расстоянии от вертикальной балки 19, а подъемное устройство содержит отклоняющие ролики 27 и 28, отклоняющие цепь 25 в сторону тягового колеса.
Пространство 29 внутри вертикальной балки 19 и подъемной рамы 7 образует вакуумную камеру для поддержания вакуума в рабочем органе 30, имеющем вакуумный привод.
Датчики 10 - 12 выполнены в виде генераторов импульсов, предпочтительно оптических, шагового типа, которые вырабатывают сигналы, поступающие на блок 13 управления.
Изобретение не ограничивается описанными здесь примерами и допускает различные модификации.
Включением приводов 3, 6 и 9 достигается перемещение изделия, захваченного рабочим органом 30. Положение кареток 2, 5 и подъемного приспособления 8 определяется датчиками 10 - 12, сигналы с которых поступают в блок 13 обработки.
Использование: подъем и перенос изделий. Сущность изобретения: транспортирующее устройство для перемещения изделий в трех направлениях содержит балки, которые выполнены коробчатыми. Внутри балок проходят соответственно тяговые элементы, прикрепленные к кареткам с помощью натяжных средств. Транспортирующее устройство содержит также возвратные шкивы, установленные на концах балок и образующие пары, между шкивами которых находятся каретки. Тяговые элементы проходят от кареток вокруг возвратных шкивов и обратно к соответствующей каретке, образуя замкнутую петлю, включающую тяговый элемент и соответствующую каретку. Для перемещения тягового элемента и через него соответствующей каретки имеется привод. 12 з.п.ф-лы, 5 ил.
| Патент США N 3777908, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для склейки фанер в стыках | 1924 |
|
SU1973A1 |
