Изобретение относится к двигателестроению, а именно к способам управления вращением приводного вала пневмо- или гидродвигателя, которые могут быть использованы в качестве основного силового или вспомогательного привода на транспорте, в машиностроении, станкостроении и т.п.
Известен способ управления вращением приводного вала [1], основанный на формировании командного сигнала с последующим его преобразованием в механическое перемещение исполнительных двигателей и через преобразователь в круговое вращение приводного вала.
Недостатком указанного способа является неравномерность вращения приводного вала и малый диапазон скоростей вращения.
Прототипом предлагаемого изобретения является способ [2], включающий подачу периодического командного сигнала, формирование результирующего сигнала управления потоком рабочей среды исполнительного двигателя путем уменьшения командного сигнала на величину сигнала обратной связи и преобразование поступательного перемещения исполнительного двигателя во вращение приводного вала, угол поворота которого измеряют для формирования указанного сигнала обратной связи.
Известный способ позволяет расширить диапазон скоростей вращения, обеспечивает однозначность между заданным и фактическим значением чисел оборотов приводного вала.
Недостатком указанного способа является невысокая равномерность вращения приводного вала.
Техническая задача, на решение которой направлено заявляемое изобретение, состоит в создании эффективного способа управления вращением приводного вала.
Технический результат, реализуемый заявляемым изобретением, заключается в обеспечении равномерного и стабильного вращения приводного вала в широком диапазоне чисел оборотов, включая предельно малые близкие к нулю и предельно большие.
Это достигается тем, что в способе управления вращением приводного вала двигателя, включающем подачу периодического командного сигнала, формирование результирующего сигнала управления потоком рабочей среды исполнительного двигателя путем уменьшения командного сигнала на величину сигнала обратной связи и преобразование поступательного перемещения исполнительного двигателя во вращение приводного вала, угол поворота которого измеряют для формирования указанного сигнала обратной связи, формирование сигнала обратной связи осуществляют путем преобразования измеренного угла поворота в периодический сигнал с частотой колебаний, равной текущему значению числа оборотов приводного вала.
А также тем, что в способе управления вращением приводного вала подают дополнительный периодический командный сигнал и дополнительный сигнал обратной связи с постоянным смещением по фазе относительно соответствующих основных сигналов и формируют дополнительный результирующий сигнал управления потоком рабочей среды дополнительного исполнительного двигателя, поступательное перемещение которого совместно с поступательным перемещением основного исполнительного двигателя преобразуют во вращение приводного вала.
Новым в заявляемом способе является формирование сигнала обратной связи путем преобразования угла поворота приводного вала в периодический сигнал с частотой колебаний, равной текущему значению числа оборотов приводного вала.
Новым так же является подача дополнительного периодического командного сигнала и дополнительного сигнала обратной связи с постоянным смещением по фазе относительно соответствующих основных сигналов и формирование дополнительного результирующего сигнала управления потоком рабочей среды дополнительного исполнительного двигателя, поступательное перемещение которого совместно с поступательным перемещением основного исполнительного двигателя преобразуется во вращение приводного вала.
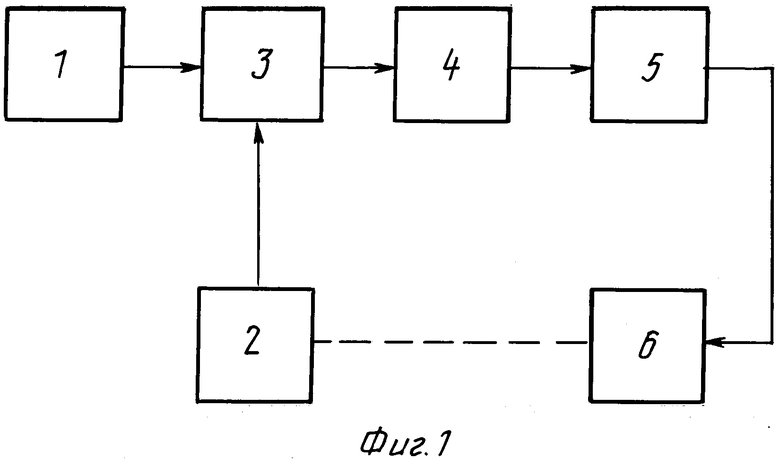
Заявляемый способ может быть реализован с использованием устройства, блок схема которого приведена на фиг.1.
Устройство содержит блок формирования периодического командного сигнала 1, блок формирования сигнала обратной связи 2, блок формирования сигнала управления потоком рабочей среды исполнительного двигателя 3, преобразователь сигнала управления 4 в поступательное перемещение исполнительного двигателя 5, преобразователь поступательного перемещения 6 исполнительного двигателя во вращение приводного вала, причем выход блока 1 соединен с первым входом блока 3, выход которого через преобразователь сигнала управления 4 механически связан с исполнительным двигателем 5. При этом исполнительный двигатель 5 соединен с преобразователем поступательного перемещения 6 исполнительного двигателя 5 во вращение приводного вала (вал на блок-схеме не показан). Выход 2 соединен со вторым входом блока формирования сигнала управления 3.
Блок формирования периодического командного сигнала 1 может быть выполнен, например, в виде генератора гармонических колебаний. В качестве блока формирования сигнала обратной связи 2 может быть использован синусно-косинусный вращающийся трансформатор, вал которого механически связан с приводным валом двигателя, формирующий на своих выходах сигналы, пропорциональные синусу и косинусу угла поворота приводного вала. Блок формирования сигнала управления потоком рабочей среды исполнительного двигателя 3 может быть реализован в виде операционного усилителя с инвертирующим и неинвертирующим входами, а преобразователь сигнала управления 4 - в виде, например, электромеханического преобразователя. Исполнительный двигатель 5 - известный гидро- или пневмоцилиндр, внутри которого совершает возвратно-поступательное перемещение поршень со штоком.
В качестве преобразователя поступательного перемещения исполнительного двигателя 6 в круговое вращение приводного вала может быть использован кривошип, установленный на приводном валу, механически связанный со штоком поршня.
Заявляемый способ осуществляется следующим образом.
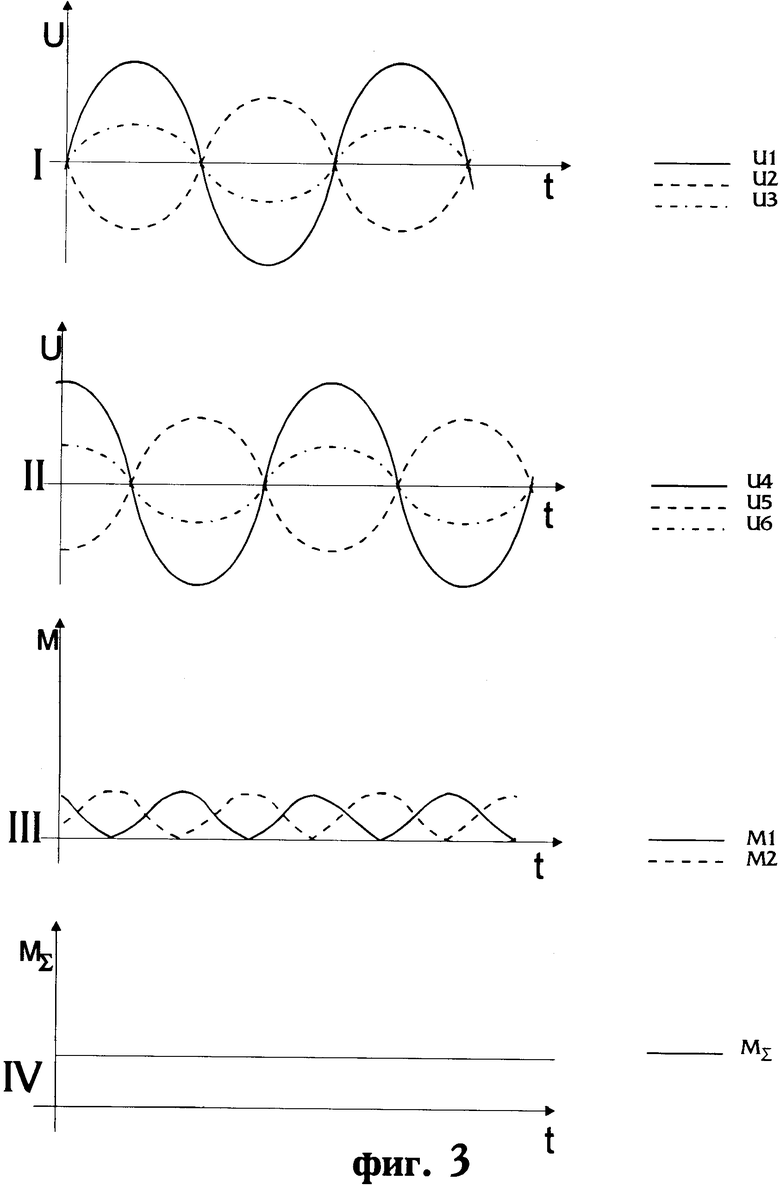
Формируют сигнал в виде электрического напряжения U1 (фиг.3.1) синусоидальной формы с частотой, равной заданному числу оборотов приводного вала, который подается на первый вход блока 3. Последовательно соединенный с ним преобразователь 4 преобразует электрический сигнал управления с блока 3 в поступательное перемещение исполнительного двигателя посредством перераспределения по синусодиальному закону рабочей среды в полостях цилиндра (в качестве рабочей среды может быть использован пар, сжатый воздух, газ, жидкость и т.п.), что приводит также к перемещению по синусоидальному закону выходного элемента (поршня) исполнительного двигателя 5, который посредством преобразователя 6 преобразуется во вращение приводного вала. При этом блок формирования сигнала обратной связи 2 формирует на своем выходе электрическое напряжение U2 (фиг.3,1), которое подается на второй вход блока 3, обеспечивая формирование сигнала управления, величина которого пропорциональна разности величины командного периодического сигнала и сигнала обратной связи - U3 (фиг.3.1).
Благодаря формированию такого сигнала обратной связи достигается постоянство амплитуды перемещения исполнительного двигателя во всем диапазоне чисел оборотов и синусоидальная зависимость этого перемещения, что обеспечивает равномерность вращения и однозначность между частотой колебания периодического командного сигнала и фактическим числом оборотов приводного вала.
Согласно способу-прототипу сигнал обратной связи формировал синусоидальную зависимость пропорционально величине перемещения штока поршня, что приводит к тому, что на больших оборотах при постоянном командном сигнале амплитуда перемещения поршня уменьшилась, следствием чего является неравномерность вращения и даже останов двигателя.
Согласно заявляемому способу сигнал обратной связи формируют путем преобразования угла поворота приводного вала в периодический сигнал с частотой колебания, равной текущему значению числа оборотов приводного вала, что обеспечивает постоянство амплитуды перемещения поршня в широком диапазоне чисел оборотов, включая предельно малые близкие к нулю и предельно большие.
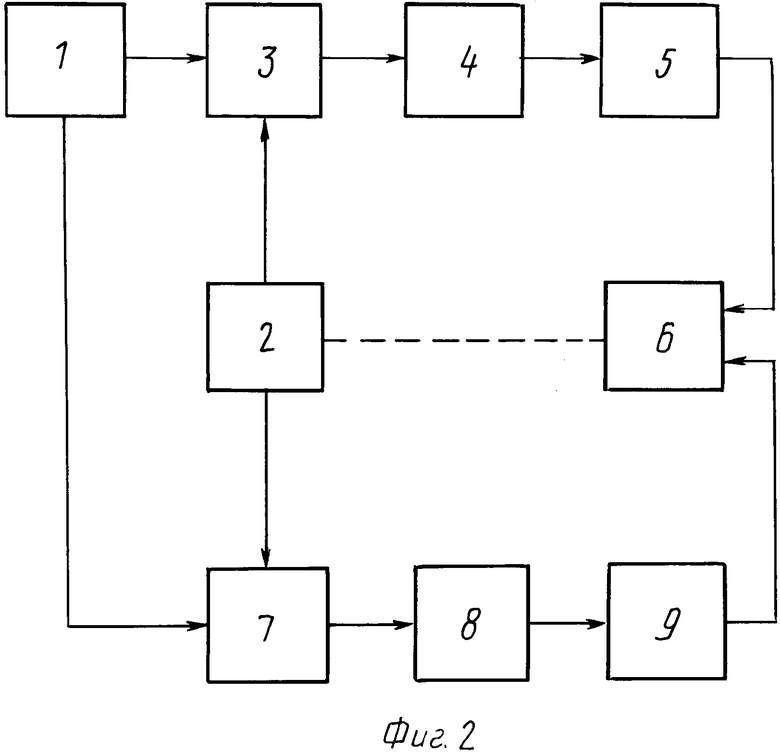
Заявляемый технический результат достигается также тем, что устройство для реализации предлагаемого способа (фиг.2) содержит последовательно соединенные второй блок формирования сигнала управления потоком рабочей среды дополнительного исполнительного двигателя 7, второй преобразователь сигнала управления 8 в поступательное перемещение исполнительного двигателя 9, при этом второй выход первого блока формирования периодического командного сигнала 1 соединен с первым входом 7, а второй выход первого блока формирования сигнала обратной связи 2 - с его вторым входом. Дополнительный исполнительный двигатель 9 механически связан с преобразователем поступательного перемещения 6.
Заявляемый способ осуществляется следующим образом.
Одновременно с основным сигналом блок формирования периодического командного сигнала 1 на втором выходе формирует дополнительный периодический командный косинусоидальный сигнал U4 (фиг.3.П), т.е. сигнал, смещенный по фазе по отношению к основному сигналу на 90о. Формируется дополнительный косинусоидальный сигнал обратной связи U5 (фиг.3,II), на величину которого уменьшают дополнительный командный сигнал U6 посредством алгебраического суммирования во втором блоке формирования сигнала управления 7. Воздействуя сигналом с этого блока через преобразователь 8 на дополнительный исполнительный двигатель 9, осуществляют перемещение поршня со штоком по косинусоидальной зависимости и, соответственно, изменение силы, действующей со стороны дополнительного поршня, на преобразователь 6, по косинусоидальной зависимости, а крутящего момента М2 - по квадратурной зависимости этого сигнала (при этом крутящий момент М1 от силы, действующей со стороны основного поршня на преобразователь 6, изменяется по квадратурной зависимости синусоидального сигнала) (фиг.3, III).
Результирующий крутящий момент Мс, действующий на приводной вал, будет иметь постоянную величину в каждый момент времени t (фиг.3, IV).
Использование заявляемого способа позволяет достичь практически абсолютного равномерного и стабильного вращения в широком диапазоне чисел оборотов, т. к. обеспечивается постоянство крутящего момента при любом угле поворота приводного вала при широком изменении нагрузки и исключении "мертвых" точек в процессе вращения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 1993 |
|
RU2093714C1 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩЕНИЕМ ПРИВОДНОГО ВАЛА | 1992 |
|
RU2030656C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 1994 |
|
RU2074504C1 |
| ЭЛЕКТРОПРИВОД | 1994 |
|
RU2074505C1 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩЕНИЕМ ПРИВОДНОГО ВАЛА СЛЕДЯЩЕГО ПНЕВМО- ИЛИ ГИДРОПРИВОДА И СЛЕДЯЩИЙ ПНЕВМО- ИЛИ ГИДРОПРИВОД ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2002 |
|
RU2218487C2 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩЕНИЕМ ПРИВОДНОГО ВАЛА СЛЕДЯЩЕГО ПНЕВМО- ИЛИ ГИДРОПРИВОДА | 2009 |
|
RU2472978C2 |
| СЛЕДЯЩИЙ ПНЕВМО- ИЛИ ГИДРОПРИВОД ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2009 |
|
RU2473822C2 |
| ЦИФРОВАЯ ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ОБЪЕКТА | 1998 |
|
RU2132080C1 |
| Регулируемый электропривод постоянного тока с периодической нагрузкой | 1981 |
|
SU985915A1 |
| НАСОСНЫЙ ГИДРОПРИВОД С ОБЪЕМНЫМ РЕГУЛИРОВАНИЕМ СКОРОСТИ | 1998 |
|
RU2153435C2 |
Сущность изобретения: периодически подают командный сигнал. Формируют результирующий сигнал управления потоком рабочей среды исполнительного двигателя путем уменьшения командного сигнала на величину сигнала обратной связи. Преобразуют поступательное перемещение исполнительного двигателя в вращение вала, угол поворота которого измеряют для формирования сигнала обратной связи. Формирование сигнала обратной связи осуществляют путем преобразования измеренного угла поворота в периодический сигнал с частотой колебаний, равной текущему значению числа оборотов приводного вала. Подают дополнительный периодический командный сигнал и дополнительный сигнал обратной связи с постоянным смещением по фазе относительно соответствующих основных сигналов и формируют дополнительный результирующий сигнал управления потоком рабочей среды дополнительного исполнительного двигателя. 1 з.п. ф-лы, 3 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ДВИГАТЕЛЬ ОБЪЕМНОГО ВЫТЕСНЕНИЯ РУССИНА | 1976 |
|
SU753210A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |

