Изобретение относится к области общего машиностроения и может быть использовано в следящих пневмо- или гидроприводах различного назначения.
Известны способ управления вращением приводного вала следящего гидропривода и устройство для его реализации, описанные в книге: Гамынин Н.С. и др. Гидравлические приводы летательных аппаратов: Учебник для авиационных специальностей вузов / Н.С. Гамынин, В.И. Карев, А.М. Потапов, А.М. Селиванов; Под общ. ред. В.И. Карева. 2-е изд., перераб. и доп. - М.: Машиностроение, 1992, с. 130-133, рис. 6.4. Известный способ включает в себя преобразование возвратно-поступательного движения исполнительного механизма во вращение приводного вала с регулированием перемещения исполнительного механизма управляющим сигналом. Для формирования управляющего сигнала измеряют угол поворота приводного вала и вычитают его из задающего сигнала, поступающего из бортовой системы управления летательного аппарата. Полученным управляющим сигналом воздействуют на распределитель рабочей среды исполнительного механизма.
Известный следящий гидропривод вращательного движения, реализующий описанный выше способ, содержит исполнительный механизм возвратно-поступательного движения, выходное звено которого связано с приводным валом через устройство преобразования возвратно-поступательного движения в поворот приводного вала. В контур управления исполнительным механизмом входят формирователь командного сигнала, блок вычитания, датчик текущего угла поворота приводного вала. Формирователем командного сигнала является бортовая система управления летательного аппарата. Известный следящий привод обеспечивает достаточно высокую точность поворота приводного вала при сравнительно небольшом диапазоне отклонения его от нулевого положения и может быть использован, как и любой следящий привод с одним исполнительным механизмом возвратно-поступательного движения, для суммарного поворота приводного вала на угол не больше 180o.
Наиболее близким к заявляемому изобретению по совокупности существенных признаков является способ управления вращением приводного вала следящего пневмо- или гидропривода и следящий привод, описанные в патенте Российской Федерации 2093714, F 15 B 9/03, 20.10.1997. Способ включает в себя преобразование возвратно-поступательного движения двух исполнительных механизмов во вращение приводного вала с регулированием перемещения каждого исполнительного механизма собственным управляющим сигналом, формирование задающего сигнала и формирование из него первого и второго командных сигналов, измерение угла поворота приводного вала и преобразование его в первый и второй сигналы обратной связи, пропорциональные, соответственно, синусу и косинусу угла поворота приводного вала, и формирование первого и второго управляющих сигналов путем уменьшения соответствующего командного сигнала на величину соответствующего сигнала обратной связи. В данном способе задающий сигнал представляет собой заданное изменение по времени частоты ω вращения приводного вала. Задающий сигнал преобразуют в два периодических командных сигнала, пропорциональных sinωt и cosωt.
Следящий пневмо- или гидропривод вращательного движения, реализующий данный способ, содержит первый и второй исполнительные механизмы возвратно-поступательного движения, выходные звенья которых связаны с приводным валом через устройство преобразования возвратно-поступательного движения во вращательное, датчик текущего угла поворота приводного вала, формирователь первого и второго командных сигналов и контуры управления первым и вторым исполнительными механизмами, при этом первый контур управления включает в себя первый блок вычитания и синусный преобразователь, второй контур управления - второй блок вычитания и косинусный преобразователь, выходы первого и второго блоков вычитания подключены к распределителям рабочей среды соответствующих исполнительных механизмов, первый и второй выходы формирователя командных сигналов подключены к первым входам первого и второго блоков вычитания, а выход датчика текущего угла приводного вала подключен ко вторым входам первого и второго блоков вычитания соответственно через синусный и косинусный преобразователи. Формирователь командных сигналов представляет собой генератор электрических колебаний с двумя выходами, с первого выхода снимается командный сигнал, пропорциональный sinωt, а с второго - cosωt. Известное изобретение успешно решает проблему обеспечения стабильного вращения приводного вала с заданной частотой вращения в широком диапазоне чисел оборота приводного вала. Однако данное изобретение не может обеспечить высокой точности поворота приводного вала на заданный угол, особенно, если угол поворота меньше 360o, так как во время вращения приводного вала происходит накопление ошибки в вычислении заданного угла поворота выходного вала. Кроме этого, известное изобретение не обеспечивает без соблюдения специальных процедур безрывковое реверсирование привода и повторное включение привода после останова приводного вала в промежуточном положении.
Задачей, на решение которой направлено настоящее изобретение, является разработка способа управлением вращением приводного вала следящего пневмо- или гидропривода и соответствующего ему следящего пневмо- или гидропривода вращательного движения, обеспечивающих прямое управление приводом по углу поворота с широким диапазоном изменения угла поворота с повышенной точностью поворота приводного вала на заданный угол, в том числе с поворотом приводного вала на угол больше 360o и с нецелым числом оборотов приводного вала. Другой задачей изобретения является разработка способа управлением вращением приводного вала следящего пневмо- или гидропривода и соответствующего ему следящего пневмо- или гидропривода вращательного движения, допускающих реверсирование привода после поворота его на любой угол и повторное включение привода после останова приводного вала в промежуточном положении и обеспечивающих при этом любой закон изменения угла поворота или крутящего момента на приводном валу.
Поставленные технические задачи решаются тем, что в способе управлением вращением приводного вала следящего пневмо- или гидропривода, включающем преобразование возвратно-поступательного движения двух исполнительных механизмов во вращение приводного вала с регулированием перемещения каждого исполнительного механизма собственным управляющим сигналом, формирование задающего сигнала и формирование из него первого и второго командных сигналов, измерение угла поворота приводного вала и преобразование его в первый и второй сигналы обратной связи пропорциональные, соответственно, синусу и косинусу угла поворота приводного вала, и формирование первого и второго управляющих сигналов путем уменьшения соответствующего командного сигнала на величину соответствующего сигнала обратной связи, согласно изобретению задающий сигнал формируют пропорциональным заданному изменению по времени угла поворота приводного вала, а первый и второй командные сигналы формируют пропорционально синусу и косинусу заданного угла поворота приводного вала.
Для следящего пневмо- или гидропривода вращательного движения поставленная задача решается тем, что в приводе, содержащем первый и второй исполнительные механизмы возвратно-поступательного движения, выходные звенья которых связаны с приводным валом через устройство преобразования возвратно-поступательного движения во вращательное, датчик текущего угла поворота приводного вала, формирователь первого и второго командных сигналов и контуры управления первым и вторым исполнительными механизмами, при этом первый контур управления включает в себя первый блок вычитания и синусный преобразователь, второй контур управления - второй блок вычитания и косинусный преобразователь, выходы первого и второго блоков вычитания подключены к распределителям рабочей среды соответствующих исполнительных механизмов, первый и второй выходы формирователя командных сигналов подключены к первым входам первого и второго блоков вычитания, а выход датчика текущего угла приводного вала подключен ко вторым входам первого и второго блоков вычитания соответственно через синусный и косинусный преобразователи, согласно изобретению формирователь первого и второго командных сигналов включает в себя задатчик изменения угла поворота приводного вала по времени, синусный и косинусный преобразователи, при этом выход задатчика изменения угла поворота приводного вала подключен к входам указанных синусного и косинусного преобразователей, выходы которых являются соответственно первым и вторым выходами формирователя командных сигналов.
Сущность изобретения - способа управления вращением приводного вала следящего пневмо- или гидропривода и соотвествующего ему следящего привода - заключается в том, что, формируя задающий сигнал пропорциональным заданному изменению по времени угла поворота приводного вала, с последующим формированием первого и второго командных сигналов, пропорциональных синусу и косинусу указанного угла, получаем прямое сравнение текущего угла поворота приводного вала с заданным его значением, что исключает при работе следящего привода накопление ошибки по времени, а также обеспечивает непрерывное сравнение текущего и заданного углов поворота при угле поворота больше 360o, так как задающий сигнал и сигнал с датчика текущего угла поворота приводного вала представлены в одинаковой форме (изменение угла по времени) и формируются одинаковым образом (пропорционально синусу и косинусу заданного и текущего углов поворота), что создает одинаковую нормирующую базу для командных сигналов и сигналов обратной связи и повышает точность определения величины управляющего сигнала и соответственно повышает точность отслеживания заданного угла поворота приводного вала, так как на каждый исполнительный механизм поступает управляющий сигнал, соответствующий закону преобразования возвратно-поступательного движения исполнительного механизма во вращение приводного вала. Формирование задающего сигнала пропорциональным заданному изменению по времени угла поворота приводного вала с последующим формированием первого и второго командных сигналов, пропорциональных синусу и косинусу указанного угла, обеспечивает также повторное включение привода после останова приводного вала в промежуточном положении, а также реверсирование привода после поворота его на любой угол, так как заданное и текущее значения углов поворота приводного вала совпадают, а закон нормирования для обоих углов остается неизменным, и соответственно не изменяются закономерности, определяющие величину крутящего момента на приводном валу.
На чертеже показана блок-схема следящего пневмо- или гидропривода вращательного движения, использующего предлагаемый способ управления.
Следящий пневмо- или гидропривод вращательного движения содержит первый исполнительный механизм 1 возвратно-поступательного движения с электрически управляемым распределителем 2 рабочей среды (жидкости) и второй исполнительный механизм 3 возвратно-поступательного движения с электрически управляемым распределителем 4 рабочей среды (жидкости). Источник рабочей среды может быть любым и на чертеже не показан. Выходные звенья 5 и 6 исполнительных механизмов связаны с приводным валом 7 через устройство 8 преобразования возвратно-поступательного движения во вращательное. На приводном валу 7 установлен датчик 9 угла поворота. Привод содержит также два контура управления исполнительными механизмами. Первый контур управления включает в себя первый блок 10 вычитания и синусный преобразователь 11. Второй контур управления включает в себя второй блок 12 вычитания и косинусный преобразователь 13. Выход блока 10 вычитания подключен к распределителю 2 рабочей среды первого исполнительного механизма. Выход блока 12 вычитания подключен к распределителю 4 рабочей среды второго исполнительного механизма.
Привод управляется от формирователя командных сигналов, который включает в себя задатчик 14 изменения угла поворота приводного вала по времени, подключенный к входам синусного 15 и косинусного 16 нелинейных преобразователей, выходы которых являются первым и вторым выходами формирователя командных сигналов. Выходы синусного 15 и косинусного 16 преобразователей подключены соответственно к первым входам блоков 10 и 12 вычитания. Выход датчика 9 угла поворота приводного вала подключен ко вторым входам блоков 10 и 12 вычитания соответственно через синусный 11 и косинусный 13 преобразователи.
Предлагаемый способ управления вращением приводного вала следящего пневмо- или гидропривода реализуется следующим образом. При отработке приводом заданного угла поворота задатчик 14 изменения угла поворота приводного вала по времени вырабатывает задающий сигнал как временную функцию заданного угла поворота приводного вала 7. Фактический угол поворота приводного вала замеряется датчиком 9. Задающий сигнал с задатчика 14 поступает на синусный 15 и косинусный 16 преобразователи, на выходе которых формируются первый и второй командные сигналы, пропорциональные синусу и косинусу заданного угла поворота приводного вала и поступающие на первые входы блоков 10 и 12 вычитания. Сигнал с датчика 9, соответствующий фактическому значению угла поворота приводного вала 7, поступает на синусный 11 и косинусный 12 преобразователи, на выходе которых формируются сигналы обратной связи, пропорциональные синусу и косинусу фактического значения угла поворота приводного вала. С выходов преобразователей 11 и 12 указанные сигналы поступают на вторые входы блоков 10 и 12 вычитания, где формируются управляющие сигналы, равные разнице между командным сигналом и сигналом обратной связи. Управляющие сигналы поступают на распределители 2 и 4 исполнительных механизмов 1 и 3 возвратно-поступательного движения. В зависимости от знака рассогласования управляющего сигнала происходит либо ускорение либо замедление перемещения выходных звеньев 5 и 6 исполнительных механизмов и соответственно ускорение или замедление поворота приводного вала 7.
Предлагаемый способ может быть реализован в следящих пневмо- или гидродвигателях с использованием современных электронных компонентов, производство которых хорошо отработано как отечественной, так и зарубежной промышленностью. В частности, в качестве задатчика изменения угла поворота приводного вала по времени и датчика угла поворота приводного вала могут использоваться потенциометрические датчики угла типа ПТП-2-1 Киевского завода "Электроприбор". При проектировании синусных и косинусных преобразователей могут использоваться схемы аналогичных преобразователей, описанные в книге: С. Сокпоф. Аналоговые интегральные схемы. - М.: Мир, 1988. В следящем приводе могут использоваться любые механизмы возвратно-поступательного движения, в частности поршневые цилиндры двухстороннего действия с золотниковыми или клапанными распределителями.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩИЙ ПНЕВМО- ИЛИ ГИДРОПРИВОД ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2009 |
|
RU2473822C2 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩЕНИЕМ ПРИВОДНОГО ВАЛА СЛЕДЯЩЕГО ПНЕВМО- ИЛИ ГИДРОПРИВОДА | 2009 |
|
RU2472978C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И ЭЛЕКТРОПРИВОД | 2002 |
|
RU2218656C2 |
| ПРИВОД ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 1993 |
|
RU2093714C1 |
| СЛЕДЯЩИЙ СИНУСНО-КОСИНУСНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД СО ВСТРОЕННОЙ ЦИФРОВОЙ КОРРЕКЦИЕЙ ОШИБКИ ПРЕОБРАЗОВАНИЯ | 2020 |
|
RU2741075C1 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩЕНИЕМ ПРИВОДНОГО ВАЛА | 1992 |
|
RU2030656C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВОДОМ АНТЕННЫ | 1999 |
|
RU2184991C2 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩЕНИЕМ ПРИВОДНОГО ВАЛА | 1992 |
|
RU2016269C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И ЭЛЕКТРОПРИВОД | 2007 |
|
RU2361355C1 |
| УСТРОЙСТВО КОРРЕКЦИИ ОШИБКИ ПРЕОБРАЗОВАТЕЛЕЙ УГЛА В КОД | 2020 |
|
RU2740511C1 |
Способ предназначен для управления вращением приводного вала следящего пневмо- или гидропривода вращательного движения. Способ включает преобразование возвратно-поступательного движения двух исполнительных механизмов во вращение приводного вала с регулированием перемещения каждого исполнительного механизма собственным управляющим сигналом, формирование задающего сигнала и формирование из него первого и второго командных сигналов, измерение угла поворота приводного вала и преобразование его в первый и второй сигналы обратной связи, пропорциональные соответственно синусу и косинусу угла поворота приводного вала, и формирование первого и второго управляющих сигналов путем уменьшения соответствующего командного сигнала на величину соответствующего сигнала обратной связи, при этом задающий сигнал формируют пропорциональным заданному изменению по времени угла поворота приводного вала, а первый и второй командные сигналы формируют пропорционально синусу и косинусу заданного угла поворота приводного вала. Пневмо- или гидропривод вращательного движения содержит первый и второй исполнительные механизмы возвратно-поступательного движения, выходные звенья которых связаны с приводным валом через устройство преобразования возвратно-поступательного движения во вращательное, датчик текущего угла поворота приводного вала, формирователь первого и второго командных сигналов и контуры управления первым и вторым исполнительными механизмами, при этом первый контур управления включает в себя первый блок вычитания и синусный преобразователь, второй контур управления - второй блок вычитания и косинусный преобразователь, выходы первого и второго блоков вычитания подключены к распределителям рабочей среды соответствующих исполнительных механизмов, первый и второй выходы формирователя командных сигналов подключены к первым входам первого и второго блоков вычитания, а выход датчика текущего угла приводного вала подключен ко вторым входам первого и второго блоков вычитания соответственно через синусный и косинусный преобразователи, при этом формирователь первого и второго командных сигналов включает в себя задатчик изменения угла поворота приводного вала по времени, синусный и косинусный преобразователи, при этом выход задатчика изменения угла поворота приводного вала подключен к входам указанных синусного и косинусного преобразователей, выходы которых являются соответственно первым и вторым выходами формирователя командных сигналов. Технический результат - повышение плавности и точности преобразования возвратно-поступательного движения во вращательное. 2 с.п. ф-лы, 1 ил.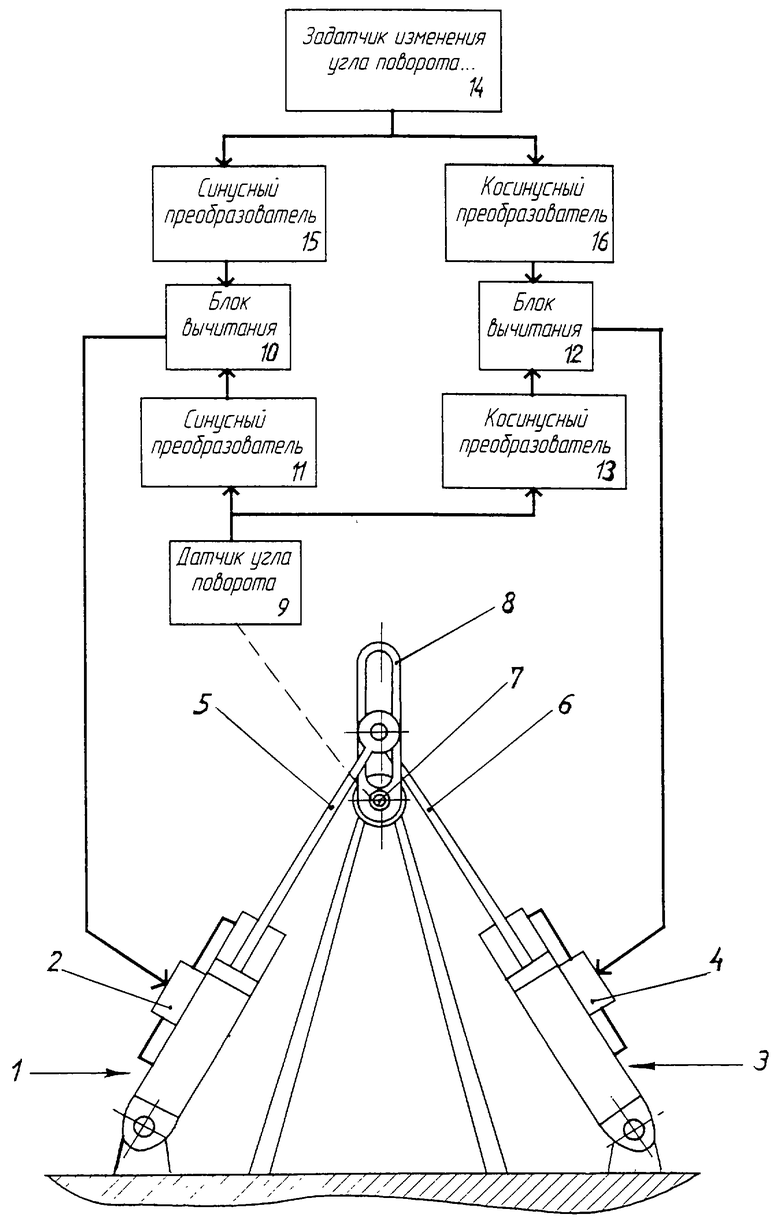
| ПРИВОД ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 1993 |
|
RU2093714C1 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩЕНИЕМ ПРИВОДНОГО ВАЛА | 1992 |
|
RU2030656C1 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩЕНИЕМ ПРИВОДНОГО ВАЛА | 1992 |
|
RU2016269C1 |
| US 4878417 A, 07.11.1989 | |||
| US 4515065 A, 07.05.1985. | |||

