Изобретение относится к двигателестроению, а именно к способам управления вращением приводного вала пневмо- или гидродвигателя, которые могут быть использованы в качестве основного силового или вспомогательного привода на транспорте, в машиностроении, станкостроении и т.п.
Известен способ управления вращением приводного вала, основанный на формировании командного сигнала с последующим его преобразованием в механическое перемещение исполнительных двигателей и через преобразователь в круговое вращение приводного вала.
Недостатком указанного способа является невозможность останова в заданном положении приводного вала.
Прототипом изобретения является способ, включающий подачу периодического командного сигнала, формирование сигнала управления потоком рабочей среды исполнительного двигателя путем уменьшения командного сигнала на величину сигнала обратной связи и преобразование поступательного перемещения исполнительного двигателя во вращение приводного вала, а также формирование сигнала останова последнего в заданном положении с последующим возобновлением вращения.
Известный способ позволяет произвести останов приводного вала путем отключения командного сигнала, т.е. уменьшения этого сигнала до нуля.
Недостатком такого способа являются резкие колебания и рывки приводного вала при останове его в нулевом положении и невозможность останова вала в любом заданном положении без рывков и колебаний.
Техническая задача, на решение которой направлено заявляемое изобретение, состоит в создании эффективного способа управления вращением приводного вала.
Технический результат, реализуемый изобретением заключается в обеспечении возможности экстренного останова в любом заданном положении приводного вала без рывков и колебаний и фиксации этого положения при действии нагрузки.
Это достигается тем, что в способе управления вращением приводного вала, включающем формирование сигнала управления потоком рабочей среды исполнительного двигателя путем уменьшения командного сигнала на величину сигнала обратной связи и преобразование поступательного перемещения исполнительного двигателя во вращение приводного вала, а также формирование сигнала останова последнего в заданном положении с последующим возобновлением вращения, сигнал останова формируется путем преобразования периодического командного сигнала в постоянный сигнал, величина которого равна мгновенному значению командного сигнала в момент останова, а возобновление вращения осуществляется за счет восстановления подачи периодического командного сигнала с начальным значением, равным величине указанного постоянного сигнала.
Новым в предлагаемом способе является преобразование командного периодического сигнала в постоянный и равный по величине мгновенному значению этого сигнала, во время, когда происходит останов приводного вала, и осуществление возобновления вращения за счет восстановления подачи периодического командного сигнала с начальным значением, равным величине указанного постоянного сигнала.
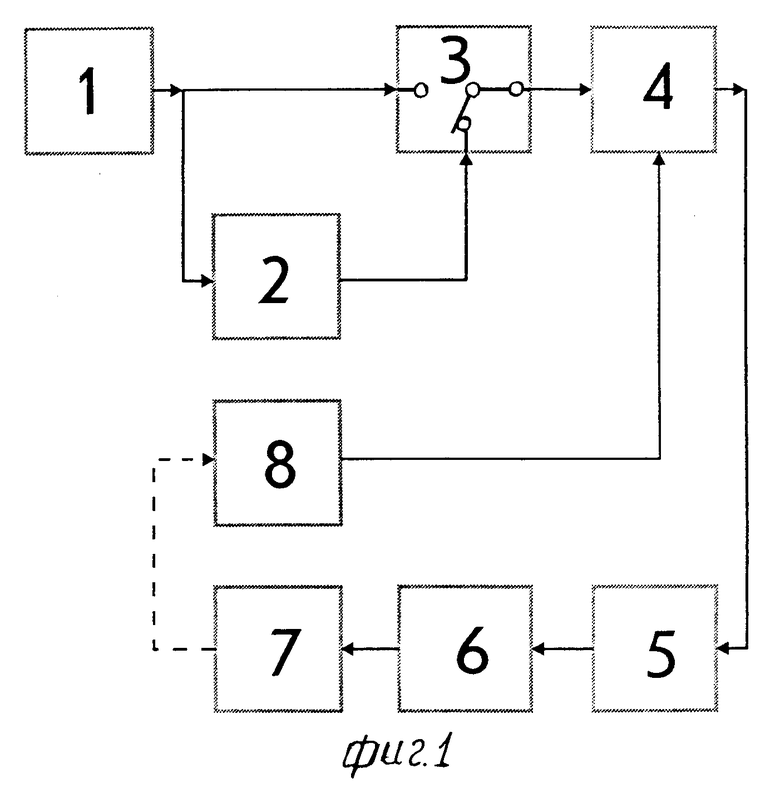
На фиг. 1 показана блок-схема устройства, реализующего предлагаемый способ.
Устройство содержит блок 1 формирования периодического командного сигнала, последовательно соединенные блок 2 памяти, переключатель 3, блок 4 формирования сигнала управления исполнительным двигателем, преобразователь 5 сигнала управления потоком рабочей среды исполнительного двигателя 6, преобразователь 7 поступательного перемещения двигателя 6 во вращение приводного вала и блок 8 формирования сигнала отрицательной обратной связи, вход которого соединен с вторым входом блока.
Блок 1 может быть реализован, например, в виде генератора гармонических колебаний. В качестве блока 2 памяти может быть использовано устройство выборки и хранения, в качестве переключателя 3 - двухканальный переключатель или коммутатор на полевом транзисторе с операционным усилителем. Операции, выполняемые блоком 2 памяти и переключателем 3, могут осуществляться и одним устройством, например аналоговым коммутатором. Блок 4 может быть выполнен в виде операционного усилителя с инвертирующим и неинвертирующим входами, а преобразователь 5, например, в виде электромеханического преобразователя. В качестве блока 8 может быть использован, например, синусно-косинусный вращающийся трансформатор, формирующий на своих выходах сигналы, пропорциональные синусу и косинусу угла поворота приводного вала. Исполнительный двигатель 6 - исполнительный силовой механизм поступательного движения, например, гидро- или пневмоцилиндр, внутри которого совершает перемещение поршень с штоком или электромотор с червячной парой и штоком. В качестве преобразователя 7 может быть использован кривошип, установленный на приводном валу и механически связанный с штоком.
Заявляемый способ осуществляется следующим образом.
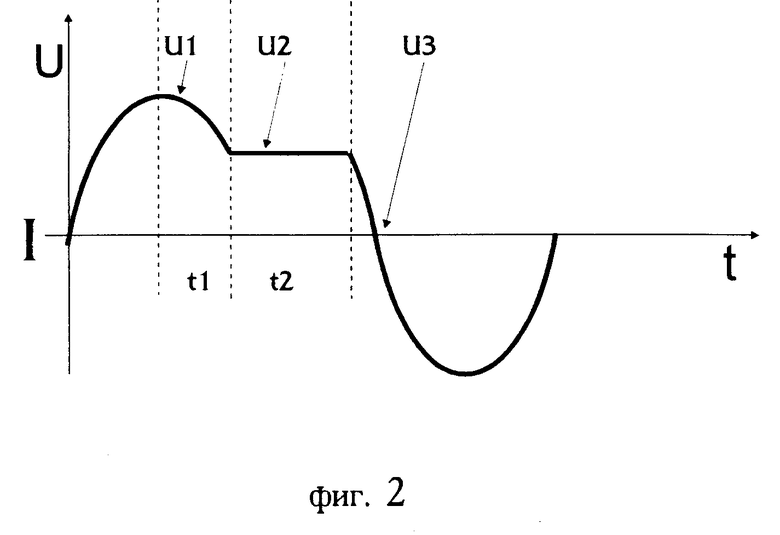
Формируют посредством блока 1 сигнал в виде электрического напряжения синусоидальной формы U1 (фиг.2) с частотой, равной заданному числу оборотов приводного вала, который в первом положении переключателя 3 подается на первый вход блока 4 через последовательно соединенные блок 2 памяти и переключатель 3.
Сигнал с выхода блока 4 управления поступает на вход преобразователя 5, который осуществляет преобразование электричеcкой энергии в поступательное перемещение по линейному закону, благодаря чему исполнительный двигатель, например шток поршня, также совершает возвратно-поступательное движение по синусоидальному закону, которое посредством преобразователя 7 преобразуется во вращение приводного вала. При этом блок 8 формирует на своем выходе электрическое напряжение, которое подается на второй вход блока 4, обеспечивая формирование сигнала управления, величина которого пропорциональна разности величины командного периодического сигнала и сигнала обратной связи.
Благодаря такому способу формирования сигналов управления и установке переключателя в первое положение достигается равномерное вращение приводного вала и однозначность между частотой колебаний периодического командного сигнала и фактическим числом оборотов приводного вала.
Для остановки двигателя переключатель 3 устанавливают во второе положение, при котором отключается от блока 4 периодический сигнал с выхода блока 1 и подключается одновременно сигнал с выхода блока 2.
Блок 2 формирует на своем выходе постоянный сигнал U2, равный мгновенному значению командного периодического сигнала в момент времени, соответствующий переводу переключателя 3 из первого положения во второе в момент останова приводного вала t1.
При таком формировании командного сигнала управления в момент останова и наличии отрицательной обратной связи достигается практически мгновенный останов приводного вала в заданном положении без каких-либо рывков и колебаний. При этом, если нагрузка пытается сдвинуть вал с заданного положения, обратная связь формирует электрический сигнал, благодаря которому исполнительный двигатель возвращается в заданное положение. При необходимости повторного вращения приводного вала в момент времени t2 переключатель 3 вновь устанавливают в первое положение, при котором на первый вход блока 4 поступает периодический гармонический сигнал U3 относительно начального значения, равного указанному постоянному сигналу с выхода блока 2, что обеспечивает плавное начало вращения без рывков и колебаний (фиг.2).
Использование заявляемого способа позволяет осуществлять практически мгновенный останов приводного вала двигателя в любом заданном положении без рывков и колебаний, фиксацию этого положения при действии нагрузки и плавное начало вращения вала из любого углового положения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ВРАЩЕНИЕМ ПРИВОДНОГО ВАЛА | 1992 |
|
RU2016269C1 |
| ПРИВОД ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 1993 |
|
RU2093714C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 1994 |
|
RU2074504C1 |
| ЭЛЕКТРОПРИВОД | 1994 |
|
RU2074505C1 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩЕНИЕМ ПРИВОДНОГО ВАЛА СЛЕДЯЩЕГО ПНЕВМО- ИЛИ ГИДРОПРИВОДА И СЛЕДЯЩИЙ ПНЕВМО- ИЛИ ГИДРОПРИВОД ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2002 |
|
RU2218487C2 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩЕНИЕМ ПРИВОДНОГО ВАЛА СЛЕДЯЩЕГО ПНЕВМО- ИЛИ ГИДРОПРИВОДА | 2009 |
|
RU2472978C2 |
| СПОСОБ УПРАВЛЕНИЯ ЦИФРОВОЙ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СЛЕДЯЩЕЙ СИСТЕМОЙ | 2021 |
|
RU2771458C1 |
| СПОСОБ УПРАВЛЕНИЯ ЦИФРОВОЙ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СЛЕДЯЩЕЙ СИСТЕМОЙ | 2021 |
|
RU2771459C1 |
| СЛЕДЯЩИЙ ПНЕВМО- ИЛИ ГИДРОПРИВОД ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2009 |
|
RU2473822C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО ПОЖАРОТУШЕНИЯ И АВТОМАТИЧЕСКАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2104073C1 |
Применение: для управления вращением приводного вала пневмо- или гидродвигателя на транспорте, в станкостроении и т. д. Сущность изобретения: способ управления вращением приводного вала включает подачу периодического командного сигнала, формирование сигнала управления путем уменьшения командного сигнала на величину сигнала обратной связи и преобразование поступательного перемещения двигателя во вращение приводного вала, а также формирование сигнала останова последнего с последующим возобновлением вращения. При этом сигнал останова формируется путем преобразования периодического командного сигнала в постоянный, величина которого равна мгновенному значению командного сигнала в момент останова, а возобновление вращения осуществляется за счет восстановления периодического сигнала, с начальным значением, равным величине указанного постоянного сигнала. 2 ил.
СПОСОБ УПРАВЛЕНИЯ ВРАЩЕНИЕМ ПРИВОДНОГО ВАЛА, включающий подачу периодического командного сигнала, формирование сигнала управления потоком рабочей среды исполнительного двигателя путем уменьшения командного сигнала на величину сигнала обратной связи и преобразование поступательного перемещения исполнительного двигателя во вращение приводного вала, а также формирование сигнала останова последнего в заданном положении с последующим возобновлением вращения, отличающийся тем, что сигнал останова формируется путем преобразования периодического командного сигнала в постоянный сигнал, величина которого равна мгновенному значению командного сигнала в момент останова, а возобновление вращения осуществляется за счет восстановления подачи периодического командного сигнала с начальным значением, равным величине указанного постоянного сигнала.
| ДВИГАТЕЛЬ ОБЪЕМНОГО ВЫТЕСНЕНИЯ РУССИНА | 1976 |
|
SU753210A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |

