Изобретение относится к области общего машиностроения и может быть использовано в следящих пневмо- или гидроприводах различного назначения.
Известен способ управления вращением приводного вала следящего пневмо- или гидропривода (патент РФ 2093714, F15B 9/03, 20.10.1997). Способ включает в себя преобразование возвратно-поступательного движения двух исполнительных механизмов во вращение приводного вала с регулированием перемещения каждого исполнительного механизма собственным управляющим сигналом, формирование задающего сигнала и формирование из него первого и второго командных сигналов, измерение угла поворота приводного вала и преобразование его в первый и второй сигналы обратной связи, пропорциональные, соответственно, синусу и косинусу угла поворота приводного вала, и формирование первого и второго управляющих сигналов путем уменьшения соответствующего командного сигнала на величину соответствующего сигнала обратной связи.
Данное изобретение не может обеспечить высокой точности поворота приводного вала на заданный угол, особенно, если угол поворота меньше 360°.
Наиболее близким является способ управления вращением приводного вала (патент РФ 2218487, F15B 9/03, 28.02.2002)
Данный способ управления вращением приводного вала следящего пневмо- или гидропривода включает преобразование возвратно-поступательного движения двух исполнительных механизмов во вращение приводного вала с регулированием перемещения каждого исполнительного механизма собственным управляющим сигналом, формирование задающего сигнала и формирование из него первого и второго командных сигналов, измерение угла поворота приводного вала и преобразование его в первый и второй сигналы обратной связи, пропорциональные соответственно синусу и косинусу угла поворота приводного вала, и формирование первого и второго управляющих сигналов путем уменьшения соответствующего командного сигнала на величину соответствующего сигнала обратной связи, при этом задающий сигнал формируют пропорциональным заданному изменению по времени угла поворота приводного вала, а первый и второй командный сигналы формируют пропорционально синусу и косинусу заданного угла поворота приводного вала.
Недостатком известного способа является неравномерность угловой скорости вращения приводного вала, особенно на малых скоростях вращения, вследствие силового взаимодействия исполнительных механизмов, работающих на один вал, и воздействия внешней нагрузки.
Целью изобретения является уменьшение неравномерности угловой скорости вращения приводного вала.
Поставленная цель достигается тем, что способ управления вращением приводного вала следящего пневмо- или гидропривода, включающий преобразование возвратно-поступательного движения двух исполнительных механизмов во вращение приводного вала с регулированием перемещения каждого исполнительного механизма собственным управляющим сигналом, формирование задающего сигнала и формирование из него первого и второго командных сигналов, измерение угла поворота приводного вала и преобразование его в первый и второй сигналы обратной связи, пропорциональные соответственно синусу и косинусу угла поворота приводного вала, и формирование первого и второго управляющих сигналов путем уменьшения соответствующего командного сигнала на величину соответствующего сигнала обратной связи, при этом задающий сигнал формируют пропорциональным заданному изменению по времени угла поворота приводного вала, а первый и второй командный сигналы формируют пропорционально синусу и косинусу заданного угла поворота приводного вала. Кроме того, измеряют давление в рабочих полостях исполнительных механизмов, сравнивают эти сигналы с заданным и командный сигнал корректируют на величину рассогласования.
Сущность изобретения - способа управления вращением приводного вала следящего пневмо- или гидропривода - заключается в том, что, формируя задающий сигнал пропорциональным заданному изменению по времени угла поворота приводного вала с последующим формированием первого и второго командных сигналов, пропорциональных синусу и косинусу указанного угла, получаем прямое сравнение текущего угла поворота приводного вала с заданным его значением, что исключает при работе следящего привода накопление ошибки по времени, а также обеспечивает непрерывное сравнение текущего и заданного углов поворота. Для исключения неравномерности угловой скорости вращения измеряют давление в рабочих полостях гидроцилиндров, сравнивают эти сигналы с заданными и командный сигнал корректируют на величину этих рассогласований.
На рисунке 1 показана блок-схема следящего пневмо- или гидропривода вращательного движения, использующего предлагаемый способ управления.
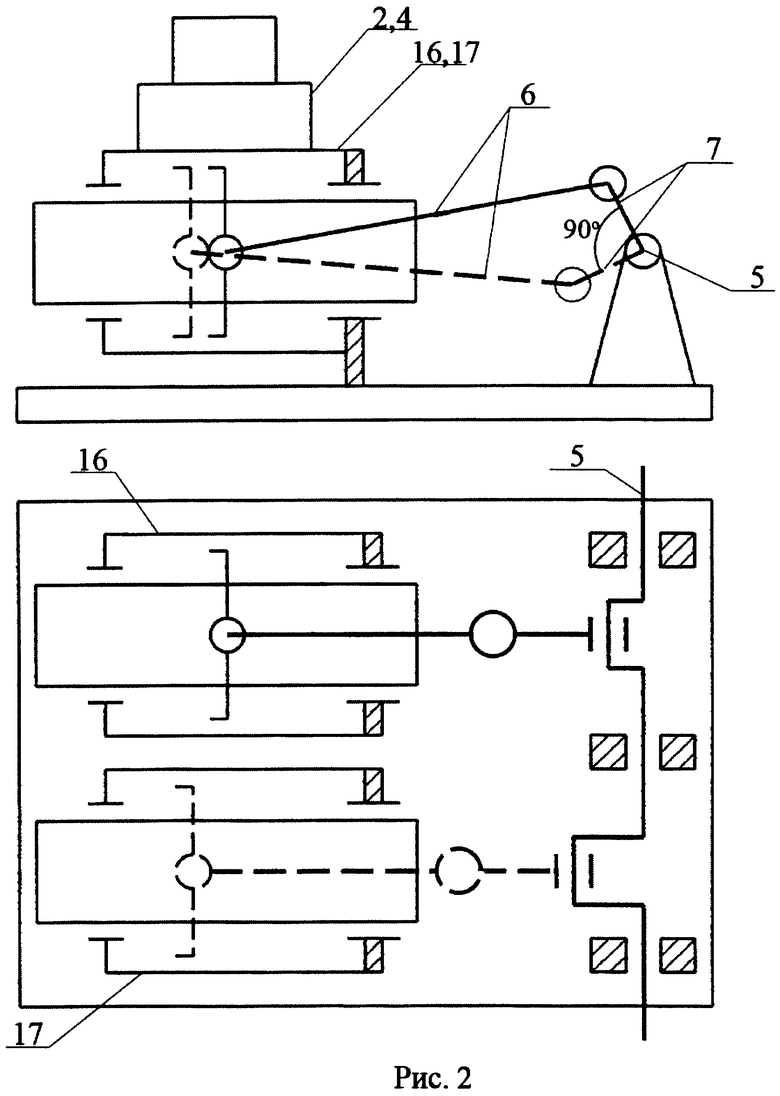
На рисунке 2 показана схема исполнительного механизма следящего пневмо- или гидропривода вращательного движения, использующего предлагаемый способ управления в двух проекциях.
Следящий пневмо- или гидропривод вращательного движения содержит первый исполнительный механизм 1 возвратно-поступательного движения с электрически управляемым распределителем 2 рабочей среды (жидкости) и второй исполнительный механизм 3 возвратно-поступательного движения с электрически управляемым распределителем 4 рабочей среды (жидкости). Источник рабочей среды может быть любым и на рисунке не показан. Выходные звенья исполнительных механизмов связаны с приводным валом 5 через устройство преобразования возвратно-поступательного движения во вращательное, выполненное в виде шатуна 6 и кривошипа 7. На приводном валу 5 установлен датчик 8 угла поворота. Привод содержит также два контура управления исполнительными механизмами. Первый контур управления включает в себя первый блок 9 вычитания и синусный преобразователь 10. Второй контур управления включает в себя второй блок 11 вычитания и конусный преобразователь 12. Выход блока 9 вычитания подключен к распределителю 2 рабочей среды первого исполнительного механизма 1. Выход блока 11 вычитания подключен к распределителю 4 рабочей среды второго исполнительного механизма 3.
Формирователь командных сигналов включает в себя задатчик 13 изменения угла поворота приводного вала 5 по времени и подключен ко входам синусного 14 и косинусного 15 нелинейных преобразователей, выходы которых являются первым и вторым выходами формирователя командных сигналов. Выходы синусного 14 и косинусного 15 преобразователей подключены соответственно к первым входам блоков 9 и 11 вычитания. Выход датчика 8 угла поворота приводного вала 5 подключен ко вторым входам блоков 9 и 11 вычитания, соответственно, через синусный 10 и косинусный 12 преобразователи.
Рабочие органы исполнительных механизмов выполнены в виде шатунов 6, соединенных с кривошипами 7, установленными на выходном валу 5 и развернутыми на 90° относительно друг друга. Пневмо- или гидроцилиндры 16 и 17 исполнительных механизмов снабжены датчиками давления 18, 19, 20, 21, соединенными с каждой полостью этих пневмо- или гидроцилиндров 16 и 17. При этом датчики давления 18, 19, 20, 21 соединены с корректирующим устройством 22, входы которого соединены с блоками вычитания 9 и 11, а выходы соединены с устройствами суммирования 23 и 24, установленными между блоками вычитания 9 и 11 и распределителем рабочей среды 2 и 4 каждого гидроцилиндра 16 и 17.
Предлагаемый способ осуществляется следующим образом. При отработке приводом заданного угла поворота задатчик 13 изменения угла поворота приводного вала 5 по времени отрабатывает сигнал как временную функцию заданного угла поворота приводного вала 5. Фактический угол поворота приводного вала 5 замеряется датчиком 8. Задающий сигнал с задатчика 13 поступает на синусный 14 и косинусный 15 преобразователи, на выходе которых формируются первый и второй командные сигналы, пропорциональные синусу и косинусу заданного угла поворота приводного вала 5 и поступающие на первые входы блоков 9 и 11 вычитания. Сигнал с датчика 8, соответствующий фактическому значению угла поворота приводного вала 5, поступает на синусный 10 и косинусный 12 преобразователи, на выходе которых формируются сигналы обратной связи, пропорциональные синусу и косинусу фактического значения угла поворота приводного вала 5. С выходов преобразователей 10 и 12 указанные сигналы поступают на вторые входы блоков 9 и 11 вычитания, где формируются управляющие сигналы, равные разнице между командным сигналом и сигналом обратной связи. Управляющие сигналы поступают на распределители 2 и 4 исполнительных механизмов 1 и 3 возвратно-поступательного движения. В зависимости от знака рассогласования управляющего сигнала происходит либо ускорение, либо замедление перемещения выходных звеньев 6 и 7 исполнительных механизмов и соответственно ускорение или замедление поворота приводного вала 5. Для уменьшения неравномерности угловой скорости вращения приводного вала 5 при отработке управляющего сигнала, возникающей вследствие силового взаимодействия электрогидравлических агрегатов и воздействия внешней нагрузки, замеряют давление в полостях цилиндров 6 и 17, сигналы с датчиков давления 18, 19, 20, 21 поступают на корректирующее устройство 22, подключенное к выходам блоков 9 и 11 вычитания. В корректирующем устройстве 22 сигналы с датчиков 18, 19, 20, 21 сравниваются с заданными сигналами, поступившими из блоков вычитания 9 и 11. Через устройства суммирования 23 и 24 откорректированный сигнал поступает на распределители рабочей среды 2 и 4 каждого гидроцилиндра 16 и 17.
Таким образом, предлагаемый способ управления вращением приводного вала следящего пневмо- или гидропривода позволяет обеспечить равномерную угловую скорость вращения вала и исключить влияние силового взаимодействия электрогидравлических агрегатов и воздействия внешней нагрузки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩИЙ ПНЕВМО- ИЛИ ГИДРОПРИВОД ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2009 |
|
RU2473822C2 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩЕНИЕМ ПРИВОДНОГО ВАЛА СЛЕДЯЩЕГО ПНЕВМО- ИЛИ ГИДРОПРИВОДА И СЛЕДЯЩИЙ ПНЕВМО- ИЛИ ГИДРОПРИВОД ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2002 |
|
RU2218487C2 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩЕНИЕМ ПРИВОДНОГО ВАЛА | 1992 |
|
RU2030656C1 |
| ПРИВОД ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 1993 |
|
RU2093714C1 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩЕНИЕМ ПРИВОДНОГО ВАЛА | 1992 |
|
RU2016269C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И ЭЛЕКТРОПРИВОД | 2007 |
|
RU2361355C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И ЭЛЕКТРОПРИВОД | 2002 |
|
RU2218656C2 |
| СЛЕДЯЩАЯ СИСТЕМА | 1993 |
|
RU2087026C1 |
| Электрогидравлический следящий привод | 1988 |
|
SU1557370A1 |
| СЛЕДЯЩИЙ СИНУСНО-КОСИНУСНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД СО ВСТРОЕННОЙ ЦИФРОВОЙ КОРРЕКЦИЕЙ ОШИБКИ ПРЕОБРАЗОВАНИЯ | 2020 |
|
RU2741075C1 |
Способ включает преобразование возвратно-поступательного движения двух исполнительных механизмов во вращение приводного вала с регулированием перемещения каждого исполнительного механизма собственным управляющим сигналом, формирование задающего сигнала и формирование из него первого и второго командных сигналов, измерение угла поворота приводного вала и преобразование его в первый и второй сигналы обратной связи, пропорциональные соответственно синусу и косинусу угла поворота приводного вала, и формирование первого и второго управляющих сигналов путем уменьшения соответствующего командного сигнала на величину соответствующего сигнала обратной связи, при этом задающий сигнал формируют пропорциональным заданному изменению по времени угла поворота приводного вала, а первый и второй командный сигналы формируют пропорционально синусу и косинусу заданного угла поворота приводного вала, при этом измеряют давление в рабочих полостях исполнительных механизмов, сравнивают эти сигналы с заданными и командный сигнал корректируют на величину рассогласования. Способ позволяет обеспечить равномерную угловую скорость вращения вала и исключить влияние силового взаимодействия электрогидравлических агрегатов и воздействия внешней нагрузки. 2 ил.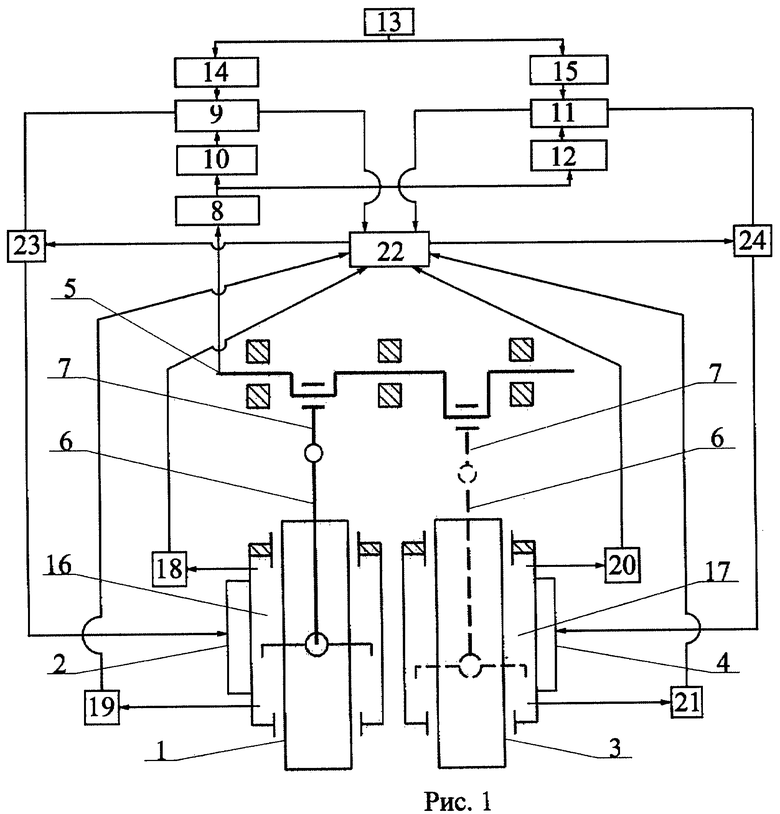
Способ управления вращением приводного вала следящего пневмо- или гидропривода, включающий преобразование возвратно-поступательного движения двух исполнительных механизмов во вращение приводного вала с регулированием перемещения каждого исполнительного механизма собственным управляющим сигналом, формирование задающего сигнала и формирование из него первого и второго командных сигналов, измерение угла поворота приводного вала и преобразование его в первый и второй сигналы обратной связи, пропорциональные соответственно синусу и косинусу угла поворота приводного вала, и формирование первого и второго управляющих сигналов путем уменьшения соответствующего командного сигнала на величину соответствующего сигнала обратной связи, при этом задающий сигнал формируют пропорциональным заданному изменению по времени угла поворота приводного вала, а первый и второй командный сигналы формируют пропорционально синусу и косинусу заданного угла поворота приводного вала, отличающийся тем, что измеряют давление в рабочих полостях исполнительных механизмов, сравнивают эти сигналы с заданными и командный сигнал корректируют на величину рассогласования.
| СПОСОБ УПРАВЛЕНИЯ ВРАЩЕНИЕМ ПРИВОДНОГО ВАЛА СЛЕДЯЩЕГО ПНЕВМО- ИЛИ ГИДРОПРИВОДА И СЛЕДЯЩИЙ ПНЕВМО- ИЛИ ГИДРОПРИВОД ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2002 |
|
RU2218487C2 |
| ПРИВОД ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 1993 |
|
RU2093714C1 |
| Способ приготовления шлихты для искусственного вискозного шелка | 1933 |
|
SU39923A1 |
| US 20070231009 A, 04.10.2007 | |||
| US 7012866 B2, 14.03.2006. | |||

