Изобретение относится к области приводов вращательного движения, предназначенных для вращения приводного вала различного рода механизмов, которые также могут быть использованы на транспорте в качестве основного силового или вспомогательного двигателя, использующих пневматические, гидравлические исполнительные силовые механизмы поступательного движения.
Известен привод вращательного двигателя [1] Привод выполнен в виде двух силовых исполнительных гидроцилиндров, штоки которых шарнирно соединены на коленчатом валу с радиусом эксцентриситета, равным половине рабочего хода каждого штока, а опорные шарниры силовых исполнительных цилиндров расположены на ортогональных осях в плоскости вращения выходного вала. Каждый исполнительный гидроцилиндр управляется своим распределительным золотником, движение которого следует профилю копира, выполненного в виде кулачка, вращающегося вместе с выходным валом.
Недостатком указанного привода является большая неравномерность вращения, узкий диапазон чисел оборотов, резкая зависимость скорости вращения от нагрузки, низкая надежность.
Из известных устройств наиболее близким к заявляемому является привод вращательного движения [2] содержащий исполнительные двигатели, выходные элементы которых связаны с механизмом преобразования поступательного перемещения во вращательное с приводным валом, блок команд, подключенный к одному входу каждого из блоков сравнения, выходы которых подключены к распределителям рабочей среды соответствующих исполнительных двигателей, а к другим входам подключены синусные и косинусные цепи отрицательное обратной связи, каждая из которых включает нелинейный блок, соединенный с датчиком измерения угла поворота приводного вала.
Техническими недостатками указанного привода являются неширокий диапазон возможных чисел оборотов, недостаточно высокая точность и равномерность вращения, особенно на малых скоростях, неоднозначность между сигналом с выхода преобразователя и фактической частотой вращения выходного вала, недостаточно высокая приемистость и надежность.
Все вышеперечисленные недостатки главным образом обусловлены тем, что синусно-косинусные потенциалы предназначены для работы при скоростях вращения не более 45 об/мин (см. например, паспорт на потенциометр типа ПТП-2-КС). Кроме того, ввиду дискретности в выдаче сигнала из-за конечного числа витков проволоки в конструкции потенциометра резко ухудшается качество сигнала обратной связи, особенно при малых скоростях вращения, а пропадание сигнала в промежутках между витками обмотки приводит к появлению искрения и помех, забивающих усилители, что и приводит к ухудшение равномерности и точности, приемистости и надежности работы привода.
Применение преобразователя в качестве блока команд также резко ухудшает точность из-за влияния систематических ошибок преобразователя на частоту вращения выходного вала, особенно при малых оборотах. Кроме того, ввиду наличия этих ошибок не удается обеспечить однозначность между фактическим числом оборотов и сигналом с выхода преобразователя.
Техническая задача, на решение которой направлено заявляемое изобретение, состоит в создании высокоэффективного привода вращательного движения, свободного от недостатков, присущих прототипу.
Технический результат, обеспечиваемый изобретением, заключается в увеличении приемистости, равномерности и стабильности вращения приводного вала при расширении диапазона чисел оборотов, включая предельно малые, близкие к нулю, и предельно большие, повышение надежности и долговечности при однозначности между командным сигналом и фактической частотой вращения приводного вала.
Это достигается тем, что в приводе, содержащем исполнительные двигатели, выходные элементы которых связаны механизмом преобразования поступательного перемещения во вращательное с приводным валом, блок команд, подключенный к одному входу каждого из блоков сравнения, выходы которых подключены к распределителям рабочей среды соответствующих исполнительных двигателей, а к другим входам подключены синусные и косинусные цепи отрицательной обратной связи, каждая из которых включает нелинейный блок, соединенный с датчиком измерения угла поворота приводного вала, блок команд выполнен в виде генератора смещенных по фазе периодических колебаний с выходами синусоидальных и косинусоидальных командных сигналов, а нелинейные блоки в виде равного числа преобразователей измеренного угла поворота в синусный и косинусный, соответственно, периодические сигналы с частотой, равной текущему значению числа оборотов приводного вала, причем каждый синусный преобразователь соединен с блоком сравнения, подключенным к выходу синусного командного сигнала, а каждый косинусный преобразователь с блоком сравнения, подключенным к выходу косинусного командного сигнала блока команд.
Технический результат, обеспечиваемый изобретением, обусловлен всей совокупностью существенных признаков.
Возможность осуществления заявляемого изобретения подтверждается представленной на чертеже блок-схемой устройства.
Привод вращательного движения содержит исполнительный двигатель в виде цилиндра 1, в котором установлен поршень 2 со штоком 3 с возможностью возвратно-поступательного перемещения, являющийся выходным звеном.
Шток 3 поршня одним концом жестко соединен с поршнем 2, а другим шарнирно связан с механизмом преобразования поступательного перемещения 4 в круговое вращение приводного вала 5, выполненного, например, в виде кривошипа 6. Последний жестко соединен с приводным валом 5, установленным в подшипниках скольжения 7, размещенных в корпусе двигателя 8. На приводном валу 5 установлен маховик 9.
На корпусе цилиндра 1 установлен распределитель рабочей среды, выполненный в виде электромеханического преобразователя золотникового типа 10.
Распределитель рабочей среды 10 соединен с емкостью 11, содержащей рабочее тело (сжатый газ или гидросмесь под давлением).
Корпус цилиндра 1 имеет проушину 12, в отверстии которой размещена ось 13, соединяющая цилиндр 1 с корпусом двигателя 8.
Привод содержит также блок команд, реализованный в виде генератора электрических колебаний 14, датчик обратной связи, выполненный в виде датчика угла 15, нелинейный преобразователь 16, блок сравнения 17 и инвертор 18.
Выход генератора электрических колебаний 14 соединен с первым входом блока сравнения 17, второй вход которого через последовательно соединенные инвертор 18 и нелинейный преобразователь 16 соединен с выходом датчика угла 15, механически связанного с приводным валом 5 привода.
Выход блока сравнения 17 соединен с входом электромеханического преобразователя золотникового типа 10, посредством которого осуществляется перераспределение рабочей среды в полостях цилиндра 1.
Привод также снабжен вторым гидроцилиндром 19 и вторым поршнем 20 со штоком 21 в качестве второго исполнительного двигателя, вторым распределителем рабочей среды, выполненным в виде электромеханического преобразователя золотникового типа 22, вторым нелинейным преобразователем 23, вторым блоком сравнения 24 и вторым инвертором 25. При этом шток 21 поршня 20 второго цилиндра шарнирно связан с механизмом преобразования поступательного движения во вращательное, выполненным в виде кривошипа 6.
Корпус цилиндра 19 имеет проушину 26, в отверстии которой размещена ось 27, соединяющая цилиндр 19 с корпусом двигателя 8. При этом первый и второй цилиндры закреплены на корпусе привода таким образом, чтобы обеспечивался угол, равный 90, между прямой, проходящей через ось вращения приводного вала 5, и ось вращения первого цилиндра 13 и прямой, проходящей через ось вращения приводного вала 5 и ось вращения второго цилиндра 27.
Второй выход генератора электрических колебаний 14 соединен с первым входом второго блока сравнения 24, второй вход которого через последовательно соединенные второй инвертор 25 и второй нелинейный преобразователь 23 соединен с выходом датчика угла 15.
Выход второго блока сравнения 24 соединен с входом второго электромеханического преобразователя золотникового типа 22, посредством которого осуществляется перераспределение рабочей среды в полостях цилиндра.
Привод вращательного движения работает следующим образом.
Генератор электрических колебаний 14 формирует на своем первом выходе электрическое напряжение синусоидальной формы с частотой, равной заданному числу оборотов приводного вала, которое подается на первый вход первого блока сравнения. С выхода блока сравнения электрический сигнал подается на вход распределителя рабочей среды, выполненного в виде электромеханического преобразователя золотникового типа 10, посредством которого осуществляется перераспределение по линейному закону рабочей среды в полостях цилиндра 1, что приводит также к перемещению по синусоидальному закону поршня 2 со штоком 3, возвратно-поступательное движение которого посредством кривошипа 6 преобразуется в круговое вращение приводного вала 5. Для того чтобы привод не останавливался в крайних положениях поршня 2, используется маховик 9, при этом датчик угла 15 формирует на своем выходе электрический сигнал, пропорциональный углу поворота приводного вала 5, который подается на вход нелинейного преобразователя 16 для преобразования в сигнал, пропорциональный синусу угла поворота вала 5.
Этот сигнал с выхода нелинейного преобразователя поступает через инвертор 18, изменяющий полярность сигнала, на второй вход блока сравнения 17.
Сформированный на втором выходе генератора 14 электрических колебаний сигнал, имеющий косинусоидальную зависимость, подается на первый вход второго блока сравнения 24.
Второй нелинейный преобразователь 23 формирует на своем выходе электрический сигнал, пропорциональный косинусу угла поворота вала 5, который после изменения полярности посредством второго инвертора 25 подается на второй вход второго блока сравнения 24.
С выхода блока сравнения электрический сигнал подается на вход второго распределителя рабочей среды, выполненного в виде электромеханического преобразователя золотникового типа 22, посредством которого осуществляется перераспределение по линейному закону рабочей среды в полостях цилиндра 19, что приведет также к перемещению по косинусоидальному закону поршня 20 со штоком 21, возвратно-поступательное движение которого посредством кривошипа 6 преобразуется в круговое вращение приводного вала.
Благодаря выполнению блока команд в виде генератора электрических колебаний, формирующего на своих выходах сигналы, смещенные относительно друг друга на постоянный угол (в данном устройстве равный 90), с соответствующим расположением осей первого и второго цилиндров, достигается полное постоянство крутящего момента, что обеспечивает равномерное вращение во всем диапазоне оборотов, включая предельно малые, близкие к нулю.
Соединение исполнительных двигателей с приводным валом может быть выполнено через механизм преобразования поступательного перемещения во вращательное в виде двух и более кривошипов, повернутых друг относительно друга на постоянный угол с расположением цилиндров в одной плоскости. Возможно осуществление соединения на основе фрикционно-зубчатых кинематических элементов и т.п.
Использование заявленного технического решения позволяет достичь практически абсолютную равномерность и стабильность вращения в широких диапазонах чисел оборотов приводного вала при широком изменении нагрузки и давления рабочей среды.
Кроме того, обеспечивается однозначность между сигналом с выхода блока команд и фактической частотой вращения выходного вала, повышается точность, приемистость, надежность и долговечность привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ВРАЩЕНИЕМ ПРИВОДНОГО ВАЛА | 1992 |
|
RU2016269C1 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩЕНИЕМ ПРИВОДНОГО ВАЛА | 1992 |
|
RU2030656C1 |
| ЭЛЕКТРОПРИВОД | 1994 |
|
RU2074505C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 1994 |
|
RU2074504C1 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩЕНИЕМ ПРИВОДНОГО ВАЛА СЛЕДЯЩЕГО ПНЕВМО- ИЛИ ГИДРОПРИВОДА И СЛЕДЯЩИЙ ПНЕВМО- ИЛИ ГИДРОПРИВОД ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2002 |
|
RU2218487C2 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩЕНИЕМ ПРИВОДНОГО ВАЛА СЛЕДЯЩЕГО ПНЕВМО- ИЛИ ГИДРОПРИВОДА | 2009 |
|
RU2472978C2 |
| СЛЕДЯЩИЙ ПНЕВМО- ИЛИ ГИДРОПРИВОД ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2009 |
|
RU2473822C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И ЭЛЕКТРОПРИВОД | 2007 |
|
RU2361355C1 |
| Устройство для бескопирной обработки деталей с равноосным контуром на металлорежущих станках | 1976 |
|
SU599960A1 |
| ГИДРОПУЛЬСАТОРНАЯ ИСПЫТАТЕЛЬНАЯ МАШИНА ДЛЯ ЦИКЛИЧЕСКИХ ИСПЫТАНИЙ ОБРАЗЦОВ МАТЕРИАЛОВ ИЛИ ИЗДЕЛИЙ НА УСТАЛОСТЬ | 2010 |
|
RU2454652C1 |
Использование: для вращения приводного вала различных механизмов. Сущность изобретения: выходные элементы исполнительных двигателей связаны механизмом преобразования поступательного перемещения в вращательное с приводным валом. Блок команд подключен к одному входу каждого блока сравнения, входы которых подключены к распределителям рабочей среды соответствующих исполнительных двигателей. К другим входам подключены синусные и косинусные цепи отрицательной обработки связи. Каждая цепь содержит нелинейный блок, соединенный с датчиком измерения угла поворота приводного вала. Блок команд выполнен в виде генератора смещенных по фазе периодических колебаний с выходами синусоидальных и косинусоидальных командных сигналов, нелинейные блоки - в виде равного числа преобразователей измеренного угла поворота в синусный и косинусный соответственно периодические сигналы с частотой, равной текущему значению числа оборотов приводного вала. Каждый синусный преобразователь соединен с блоком сравнения, подключенным к выходу синусного командного сигнала, каждый косинусный преобразователь - с блоком сравнения, подключенным к выходу косинусного командного сигнала блока команд. 1 ил.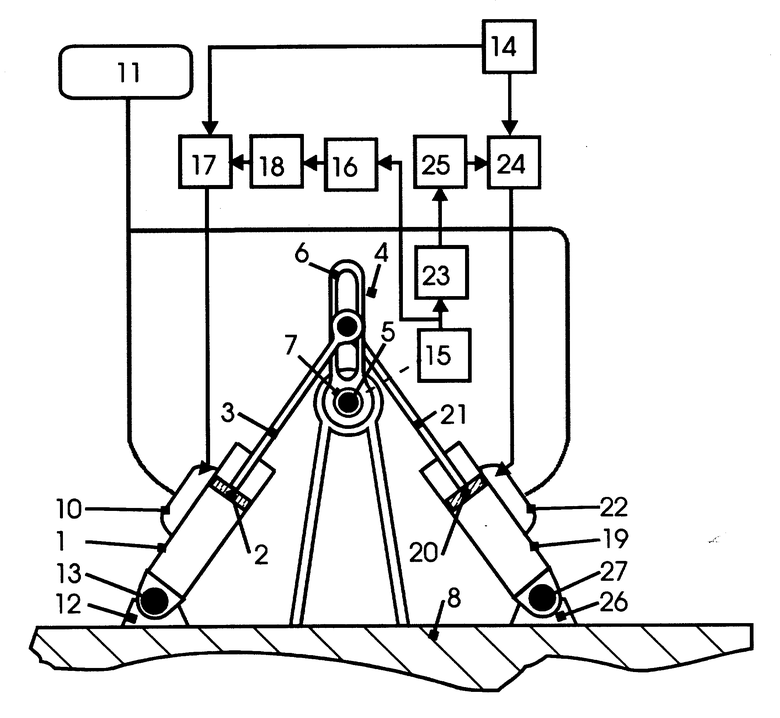
Привод вращательного движения, содержащий исполнительные двигатели, выходные элементы которых связаны механизмом преобразования поступательного перемещения во вращательное с приводным валом, блок команд, подключенный к одному входу каждого из блоков сравнения, выходы которых подключены к распределителям рабочей среды соответствующих исполнительных двигателей, а к другим входам подключены синусные и косинусные цепи отрицательной обратной связи, каждая из которых включает нелинейный блок, соединенный с датчиком измерения угла поворота приводного вала, отличающийся тем, что блок команд выполнен в виде генератора смещенных по фазе периодических колебаний с выходами синусоидальных и косинусоидальных командных сигналов, а нелинейные блоки в виде равного числа преобразователей измеренного угла поворота в синусный и косинусный соответственно периодические сигналы с частотой, равной текущему значению числа оборотов приводного вала, причем каждый синусный преобразователь соединен с блоком сравнения, подключенным к выходу синусного командного сигнала, а каждый косинусный преобразователь с блоком сравнения, подключенным к выходу косинусного командного сигнала блока команд.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Следящий гидравлический привод | 1974 |
|
SU495656A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электрогидравлический следящий привод | 1988 |
|
SU1557370A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |

