Изобретение относится к области укладочных работ при строительстве трубопроводов и может быть использовано на трубоукладчиках, работающих в составе изоляционно-укладочной колонны машин.
Известны различные устройства для измерения расстояний, например устройство для измерения длины, включающее в себя гибкий трос, наматываемый на барабан, и счетчик числа оборотов барабана. По числу оборотов барабана судят об измеряемом расстоянии.
Недостатком таких устройств является то, что расстояние измеряется между подвижным и неподвижным объектами. При этом регулировать расстояние можно только путем измерения положения подвижного объекта. При двух подвижных объектах, относительно большом расстоянии между ними и сложных условиях работы передача управляющего сигнала с объекта, где происходит измерение, на другой объект оказывается затруднительной. Кроме того, без дополнительных элементов такое устройство не позволяет получать управляющие сигналы на изменение своего положения для двух подвижных объектов.
Цель изобретения - повышение точности регулирования расстояния между трубоукладчиками за счет передачи информации с одного из них на другой по гибкому тросу, что позволяет снизить неравномерность загружения машин, повысить эффективность работы грузоподъемных средств и надежность машин в целом и тем самым повысить производительность труда и работ.
Цель достигается тем, что система, содержащая барабан с датчиком угла поворота, установленный на идущем сзади трубоукладчике, и гибкий трос, одним концом связанный с барабаном, дополнительно содержит задатчик угла поворота, два релейных элемента и элемент сравнения, два входа которого соединены с датчиком и задатчиком угла поворота, а выход - с входами первого и второго релейных элементов, причем выход первого релейного элемента через преобразователь напряжения в ток соединен с двигателем, кинематически связанным с барабаном, исполнительный механизм привода впереди идущего трубоукладчика соединен с другим концом троса через контактное устройство, а выход второго релейного элемента соединен с исполнительным механизмом идущего сзади трубоукладчика.
На чертеже представлена структурная схема системы.
Система включает в себя трубоукладчики 1 и 2, связанные между собой посредством гибкого троса 3 и барабана 4 с установленным на последнем датчиком 5 угла поворота барабана, задатчик 6 угла поворота, элемент 7 сравнения, входы которого соединены с датчиком 5 и задатчиком 6 угла поворота, а выход - с релейными элементами 8 и 9. Релейный элемент 8 связан с барабаном 4 через последовательно соединенные преобразователь 10 напряжения в ток и двигатель 11. Последний связан с барабаном 4 кинематически. Барабан 4 последовательно соединен через гибкий трос 3 и контактное устройство 12 с исполнительным механизмом 13 привода хода трубоукладчика 1. Выход релейного элемента 9 соединен с исполнительным механизмом 14 привода хода трубоукладчика 2.
Система регулирования расстояния между трубоукладчиками работает следующим образом.
Все элементы системы, кроме контактного устройства 12 и исполнительного механизма 13 привода хода трубоукладчика 1, расположены на трубоукладчике 2. Гибкий трос 3 одним концом прикреплен к барабану 4, а другим - к контактному устройству 12. Трубоукладчики 1 и 2 устанавливаются на заданном расстоянии между собой. При этом угол поворота барабана 4, соответствующий заданному расстоянию, фиксируется задатчиком 6 угла поворота, и в дальнейшем выходное напряжение Uϕзадзадатчика 6 угла поворота соответствует заданному углу поворота ϕзадбарабана 4 и заданному расстоянию Lзад.
При движении трубоукладчиков на элементе 7 сравнения происходит сравнение сигнала Uϕзад, поступающего с задатчика 6, и сигнала Uϕ, поступающего с датчика 5 угла поворота барабана. Выходной сигнал элемента 7 сравнения имеет величину
ΔUϕ=Uϕзад-Uϕ.
Двигатель 11 находится постоянно во включенном состоянии и создает на барабане 4 некоторый вращающий момент, совпадающий по направлению с поворотом барабана 4 в сторону наматывания гибкого троса 3. Тем самым предотвращается чрезмерное провисание гибкого троса 3.
Рассмотрим случай, когда L ≅ Lзад, т.е. расстояние стало меньше заданного. Барабан 4 поворачивается на некоторый угол ϕ в сторону наматывания троса 3. Этот угол измеряется датчиком 5 угла поворота. В этом случае напряжение ΔUϕ > 0 и по достижении его значения некоторой величины срабатывает релейный элемент 9, который подает команду исполнительному механизму 14 привода хода трубоукладчика, и трубоукладчик 2 останавливается. В результате остановки трубоукладчика 2 и продолжающегося движения трубоукладчика 1 расстояние между машинами увеличивается.
Теперь рассмотрим случай, когда L > Lзад, т.е. расстояние стало больше заданного. В этом случае напряжение ΔUϕ < 0 и по достижении его значения некоторой величины срабатывает релейный элемент 8. При этом выходное напряжение релейного элемента 8 снижается с некоторого значения Uмакс до значения Uмин, которое подается на вход преобразователя 10 напряжения в ток.
Выходным параметром преобразователя 10 является ток якоря Iядвигателя 11. Двигатель 11 создает на барабане 4 вращающий момент M = Mмин. Так как этот вращающий момент совпадает по направлению с поворотом барабана 4 в сторону наматывания троса 3 и усилие F в тросе 3 определяется в основном вращающим моментом двигателя 11 и инерционными свойствами барабана 4:
F=  , где I - момент инерции барабана 4; R - его радиус, то при уменьшении вращающего момента от Ммакс до Ммин снижается и усилие в тросе 3 от значения Fмакс до значения Fмин. В этом случае на трубоукладчике 1 срабатывает контактное устройство 12, а исполнительный механизм 14 подает команду на отключение привода хода трубоукладчика 1. Трубоукладчик 1 останавливается, и расстояние между ним и трубоукладчиком 2 уменьшается. Когда это расстояние уменьшается до заданного, срабатывает релейный элемент 8 и на его выходе появляется напряжение U = Uмакс, которое создает на двигателе 11 вращающий момент М =Ммакс. Усилие в тросе 3 увеличивается до значения Fмакс и контакты контактного устройства 12 замыкаются, что дает команду на включение привода хода трубоукладчика 1. Характеристика релейного элемента 8 построена таким образом, что при выходе контролируемого расстояния за свои пределы уменьшается выходное напряжение с Uмакс до Uмин, в результате чего снижается усилие в тросе 3 с Fмакс до Fмин. При этом барабан 4 дополнительно поворачивается на угол
, где I - момент инерции барабана 4; R - его радиус, то при уменьшении вращающего момента от Ммакс до Ммин снижается и усилие в тросе 3 от значения Fмакс до значения Fмин. В этом случае на трубоукладчике 1 срабатывает контактное устройство 12, а исполнительный механизм 14 подает команду на отключение привода хода трубоукладчика 1. Трубоукладчик 1 останавливается, и расстояние между ним и трубоукладчиком 2 уменьшается. Когда это расстояние уменьшается до заданного, срабатывает релейный элемент 8 и на его выходе появляется напряжение U = Uмакс, которое создает на двигателе 11 вращающий момент М =Ммакс. Усилие в тросе 3 увеличивается до значения Fмакс и контакты контактного устройства 12 замыкаются, что дает команду на включение привода хода трубоукладчика 1. Характеристика релейного элемента 8 построена таким образом, что при выходе контролируемого расстояния за свои пределы уменьшается выходное напряжение с Uмакс до Uмин, в результате чего снижается усилие в тросе 3 с Fмакс до Fмин. При этом барабан 4 дополнительно поворачивается на угол
Δϕ 
 , где С - жесткость троса 3. Именно такое построение позволяет за счет снижения некоторой чувствительности системы исключить лишние переключения релейных элементов и тем самым увеличить надежность всей системы.
, где С - жесткость троса 3. Именно такое построение позволяет за счет снижения некоторой чувствительности системы исключить лишние переключения релейных элементов и тем самым увеличить надежность всей системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ КУРСОВОГО ДВИЖЕНИЯ ТРУБОУКЛАДЧИКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2019496C1 |
| Устройство для управления приводами подъма груза и стрелы крана-трубоукладчика | 1990 |
|
SU1791345A1 |
| Способ управления краном-трубоукладчиком с троллейной подвеской | 1989 |
|
SU1728116A1 |
| Трубоукладчик | 1990 |
|
SU1766833A1 |
| Устройство для автоматического регулирования нагрузки крана-трубоукладчика | 1988 |
|
SU1533990A1 |
| МАНИПУЛЯТОР | 1991 |
|
RU2022784C1 |
| УСТРОЙСТВО ДЛЯ ПОДВЕСКИ КАБЕЛЯ | 2008 |
|
RU2363082C1 |
| Многозвенный механизм управления рабочими органами корнеклубнеуборочных машин | 1988 |
|
SU1724047A1 |
| РЕГУЛЯТОР ПРЯДЕНИЯ | 1973 |
|
SU370290A1 |
| Машина для термической резки листов | 1979 |
|
SU872086A1 |
Изобретение относится к области укладочных работ при строительстве трубопроводов и может быть использовано на трубоукладчиках, работающих в составе изоляционно-укладочной колонны машин. Цель изобретения - повышение точности регулирования расстояния между трубоукладчиками за счет передачи информации с одного из них на другой по гибкому тросу. Система включает в себя трубоукладчики 1 и 2, связанные между собой через гибкий трос 3 и барабан 4, датчик 5 и задатчик 6 угла поворота барабана, подключенные к входам элемента 7 сравнения, релейные элементы 8 и 9, причем выход релейного элемента 8 связан с приводом хода впереди идущего трубоукладчика 1 через преобразователь 10 напряжения в ток, двигатель 11, барабан 4, гибкий трос 3, контактное устройство 12 и испытательный механизм 13 привода хода трубоукладчика, а выход релейного элемента 9 связан с приводом хода сзади идущего трубоукладчика 2 через исполнительный механизм 14 привода хода трубоукладчика. Система позволяет повысить эффективность и надежность работы трубоукладчиков в колонне и тем самым повысить производительность труда и работ. 1 ил.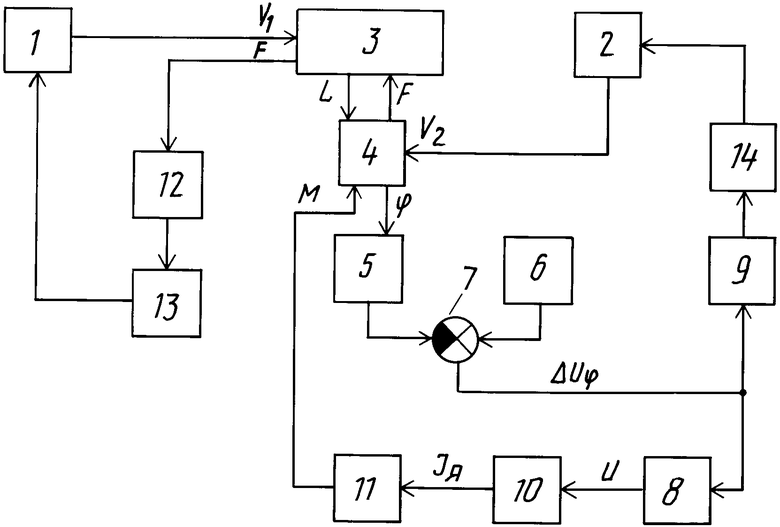
СИСТЕМА РЕГУЛИРОВАНИЯ РАССТОЯНИЯ МЕЖДУ ТРУБОУКЛАДЧИКАМИ, содержащая барабан с датчиком угла поворота, установленный на одном из трубоукладчиков, и гибкий трос, одним концом связанный с барабаном, отличающаяся тем, что, с целью повышения точности, она содержит задатчик угла поворота, два релейных элемента и элемент сравнения, два входа которого соединены с датчиком и задатчиком угла поворота, а выход - с входами первого и второго релейных элементов, причем выход первого релейного элемента через преобразователь напряжения в ток соединен с двигателем, кинематически связанным с барабаном, установленным на идущем сзади трубоукладчике, исполнительный механизм привода впереди идущего трубоукладчика соединен с другим концом троса через контактное устройство, а выход второго релейного элемента соединен с исполнительным механизмом идущего сзади трубоукладчика.
| Устройство для измерения длины | 1981 |
|
SU970109A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
