Изобретение относится к измерениям длины или расстояний, в частности к устройствам для измерения длин траншей и т.п. сооружений, например, при прокладке магистральных трубопроводов.
Широко распространены издавна простейшие приспособления для измерения длин при производстве геодезических работ и замера выполненных земляных работ. К таким простейшим приспособлениям относятся мерные рулетки, измерительные ленты и x.n.lj.
Их использование связано с применением ручного труда,, а значит с дополнительными затратами времени, поскольку они выполняются только после завершения работы.
Известны также устройствадля измерения длин гибких перематываемых изделий, например лент, путем измерения числа оборотов барабанов, на которые наматывается изделие 2.
Устройства такого типа допускаиот автоматизацию процесса измеренийj но возможности их применения оказаJIИcь ограничены определенным кругом объектов.
Измерение длин или расстояний, проходимых подвижными агрегатами.
осуществляется также с помощью мерных колес, движущихся вместе с агрегатом и оборудованных датчиком-счетчиком числа оборотов колеса .3 .
Поскольку также измерители определяют весь путь, проходимый агрегатом, они .не обеспечивают приемлемой точности определения длины сооружения, например траншеи, отрытой при
10 движении агрегата.
Известны также устройства для измерения длины, выполненные в виде гибкого элемента - троса с грузом на конце, наматываемого на привод15ной барабан, оборудованный счетчиком числа его оборотов, управляемым от датчика натяжения гибкого элемента С 4.
20
Хотя такие устройства применяются, главным образом, для измерения изменений уровня воды или глубины водоемов, они могут рассматриваться в качестве прототипа. Тем не менее
25 они безусловно, не приспособлены для измерения длины объектов, подобных откапываемым траншеям, прежде всего потому, что в них задается вертикгшьное расположение гибкого
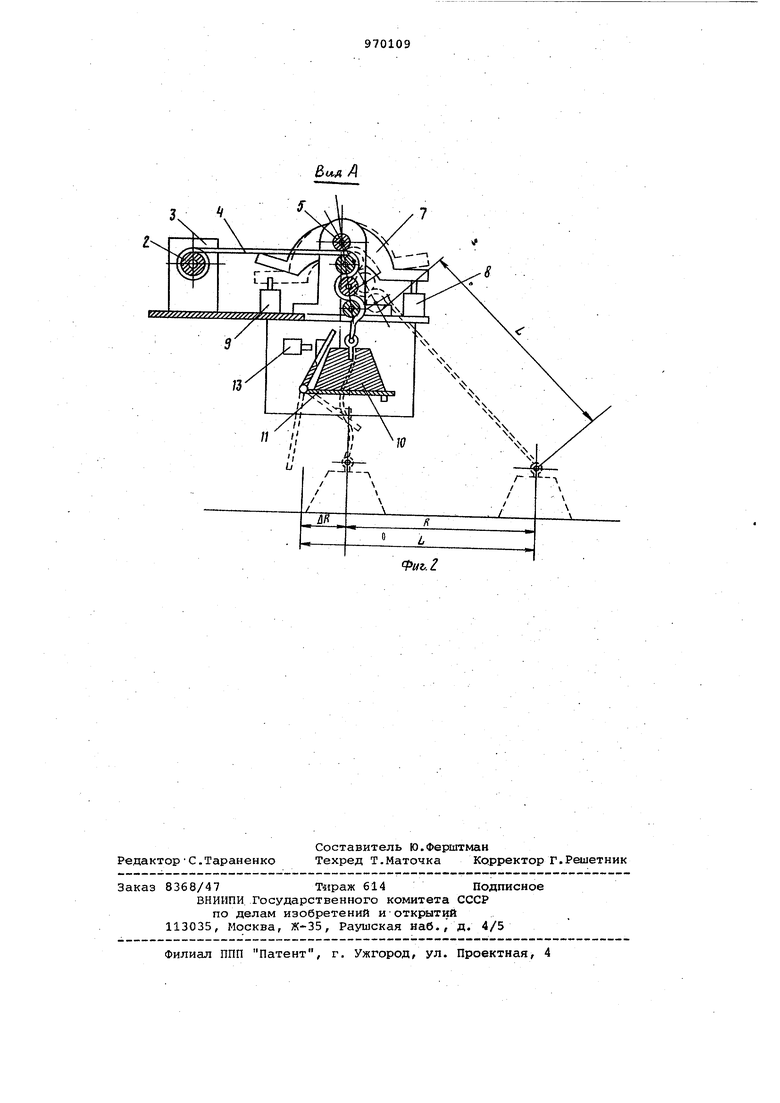
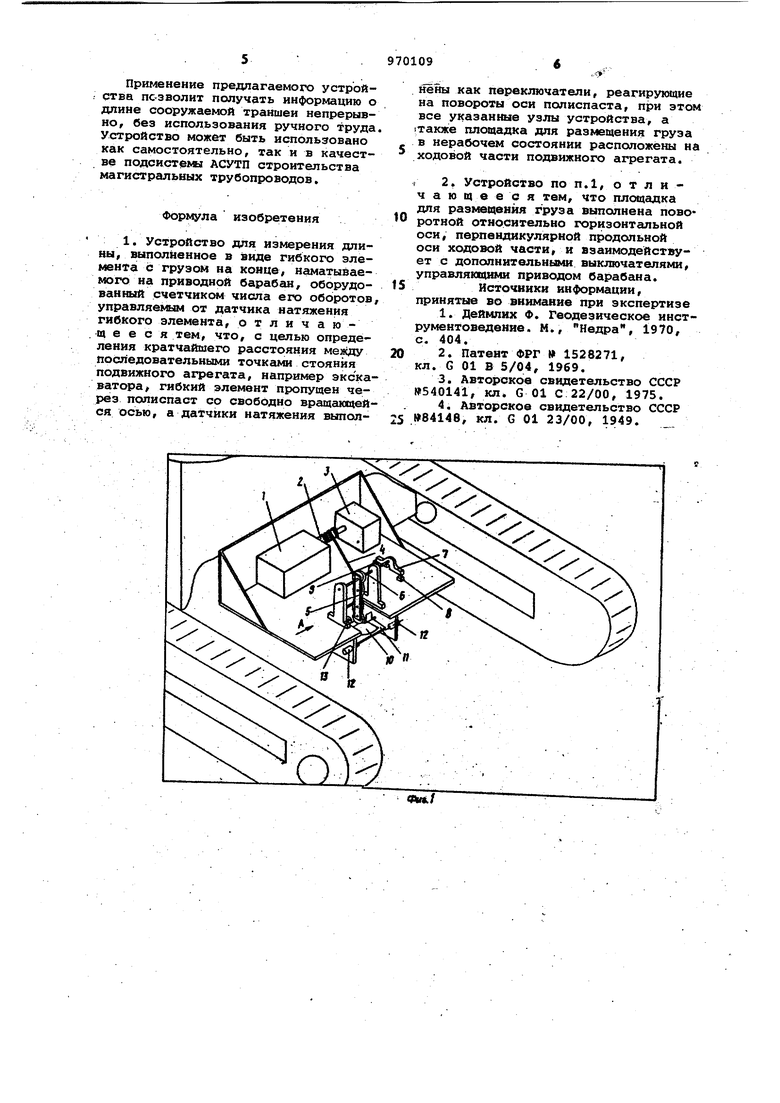
30 элемента, а изменение натяжения свя-«. эано с переходом через границу сред например вода-воздух. Цель изобретения - обеспечение определения кратчг1йшего расстояния между последовательными точками сто ния подвижного агрегата, например . экскаватора. Для достижения этой цели в устро стве гибкий элемент пропущен через полиспаст со свободно враща кцейся осью, а датчики натяжения выполнены как переключатели, реагирующие на 1 повороты t оси полиспаста, при этом все укааанные узлы устройства, а также площадка для размещения груза в нерабочем состоянии расположены на ходовой части подвижного агрегат Площадка для размещения груза выполнена поворотной относительно горизонтальной оси, перпендикулярной продольной оси ходовой части, и взаимодействует с дополнительными выключателями, управляющими приводо барабана. На фиг. 1 показано устройство, общий вид; на фиг. 2 --вид по стрел ке А на фиг. 1.. Устройство размещено находовой раме экскаватора в передней е част Устройство состоит из лебедки 1, на барабан 2, который соединен с да чиком 3 оборотов, наматывается гибкий элемент (трос) 4. Датчик 3 элек рически соединен со счетчиком длины установленным в кабине экскаватора (не показано). Трос 4 огибает блоки полиспаста 5, установленного на оси 6,жестко соединенной с коромлслом 7,взаимодействующим при повор оте полиспаста вокруг оси б с подпружиненными толкателями концевых выключателей 8 и 9. Свободный конец трос 4 соединен с грузом 10, установленным в нерабочем положении на опроки дывающейся площадке 11, удерживаемо в горизонтальном положении электромагнитными фиксаторами 12 и взаимодействующей с концевым выключателем 13. Устройство работает следующим об разом.. В исходном положении экскаватор ориентирован вдоль проектной оси траншеи. Груз 10 установлен на опро кидывающейся площадке 11, трос 4 не натянут. Подпружиненный ТоЛкател концевого выключателя 8 воздействует на коромысло 7, в результате чего пбследнее поворачивается, а вмес те с ним и ось. 6, и полиспаст 5 уст навливается под углом к вертикали. Подается команда Сброс, лебедка 1 включается и трос 4 начинает нама тываться на барабан 2, груз 10 поднимается над плсяцадкой 11, и под действием его веса полиспаст 5 поворачивается, устанавливаясь в вертикальном положении. При этом поворачиваются ось б и коромысло 7 и срабатывает концевой выключатель 8, электрически связанный с фиксаторами 12, которые при этом убираются. Площадка 11 опрокидывается и своей задней стенкой ложится на груз 10. При дальнейшем подъеме груза 10 площадка 11 своейзадней стенкой нажимает на толкатель концевого выключателя 13, что вызывает остановку и реверсирование привода барабана 2, при этом трос 4 сматывается с барабана 2, 10 опускается на грунт, после чего натяжение троса 4 ослабевает, и толкатель концевого выключателя 8 отжимает коромлсло 7. Концевой выключатель 8 отключается, происходит остановка привода лебедки 1, кратковре менное торможение барабана 2 и возврат фиксаторов 12 в исходное полсйкение (фиксаторы выдвинуты). Затем экскаватор перемещается на следующую рабочую стоянку, двигаясь по некоторой траектории, в случае необходимое ти, нозвратногпоступательно. . Трос 4 сматывается с барабана 2 и свободно ложится на грунт. При поступлении команды Счет трос 4 начинает наматываться на барабан 2. Когда слабина троса 4 выбрана, полиспаст 5 Поворачиваете в сторону груза 10 и коромысло 7 воздействует на толкатель концевЬго выкд:1ючателя 9, что вызывает подключение датчика 3 к счетчику длины, установленному в кабине экскаватора. Команда на продолжение счета остается до полного подъема груза 10. Дальнейшее наматывание троса 4 на барабан 2 вызывает подтягивание груза 10 и вывешивание на тросе 4. Груз 10, поднимаясь, упирается в заднюю стенку пло1-1адки 11, которая поворачивается до срабатывания концевого выключателя 13, в результате чего подается сигнал на прекращение счета, остановку и реверсирование барабана 2. Груз 10 рпуска ется, устанавливается на опрокидывающейся площадке 11, которая при этом опирается иа фиксаторы 12. На:тяжение троса 4 ослабевает, толкатель концевого выключателя отжимает корокЕЛСЛо 7, и отключается привод лебёдки 1 с кратковременным тсчжожеиием барабана 2, что предотвращает петлеобразование троса 4 на барабане 2. Использование предлагаемого устройства обусловливает наличие погрешности R L - R, т.е. отличи- ем наклонного расстояния от горизонтального положения.. Величина этой погрешности, как показали расчеты и испытания, не превышает 2,5% от вй длины траншеиi
Применение предлагаемого устройства позволит получать информацию о длине сооружаемой траншеи непрерывно, без использования ручного труда. Устройство может быть использовано как самостоятельно, так и в качестве подсистемы АСУТП строительства магистральных трубопроводов.
Формула изобретения
1. Устройство для измерения длины, выполненное в виде гибкого элемента с грузом на конце, наматываемого на приводной барабан, оборудованный счетчиком числа его оборотов, управляемым от датчика натяжения гибкого элемента, о т л и ч а ю щ е е с я тем, что, с целью определения кратчайшего расстояния между последовательными точками стояния подвижного агрегата, например экскаватора t гибкий элемент пропущен через полиспаст со свободно вращающейся осью, а датчики натяжения выполнены как переключатели, реагирующие на повороты оси полиспаста, при этом все указанные узлы устройства, а гтакже площадка для размещения груза в нерабочем состоянии расположёны на ходовой части подвижного агрегата.
I 2. Устройство ПОП.1, отличающееся тем, что площадка для размещения груза выполнена поворотной относительно горизонтальной оси, перпендикулярной продольной оси ходовой части, и взаимодействует с дополнительными выключателями, управляющими приводом барабана.
Источники информации,
принятые во внимание при экспертизе
1. Деймлих Ф. Геодезическое инструментоведение. М., Недра, 1970, с. 404.
2. Патент ФРГ 1528271, кл. G 01 В 5/04, 1969.
3.Авторское свидетельство СССР №540141, кл G 01 С 22/00, 1975.
4.Авторское свидетельство СССР №84148, кл. G 01 23/00, 1949.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматической намотки-размотки кабеля привязных БПЛА | 2023 |
|
RU2819974C1 |
| СИСТЕМА ДЛЯ ЗАГРУЗКИ И ТРАНСПОРТИРОВКИ МЕЛКОДИСПЕРСНЫХ МАТЕРИАЛОВ | 2005 |
|
RU2294889C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ РАЗМЕРОВ ТРАНШЕИ | 1990 |
|
RU2025647C1 |
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| МОСТОВОЙ АГРЕГАТ ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ РАБОТ | 2003 |
|
RU2255453C2 |
| Устройство для кабельной связи с подвижными объектами | 1983 |
|
SU1138869A1 |
| Прибор для определения размера обуви | 1986 |
|
SU1391587A1 |
| УСТРОЙСТВО МАНЕВРОВОЕ | 2007 |
|
RU2357885C1 |
| Судовая аппарель | 1973 |
|
SU1207392A3 |
| ПДТЕНТНО-ТЕХПГЕ'ИДРЕ:'-:БЛпО"ГКА | 1971 |
|
SU302266A1 |