Изобретение относится к радиотехнике, а именно к специальным электрическим фильтрам, и может быть использовано в приемных и измерительных приборах, а также в системах автоматического управления в качестве корректирующих устройств.
Цель изобретения - упрощение перестройки путем обеспечения взаимонезависимой перестройки параметров передаточной функции.
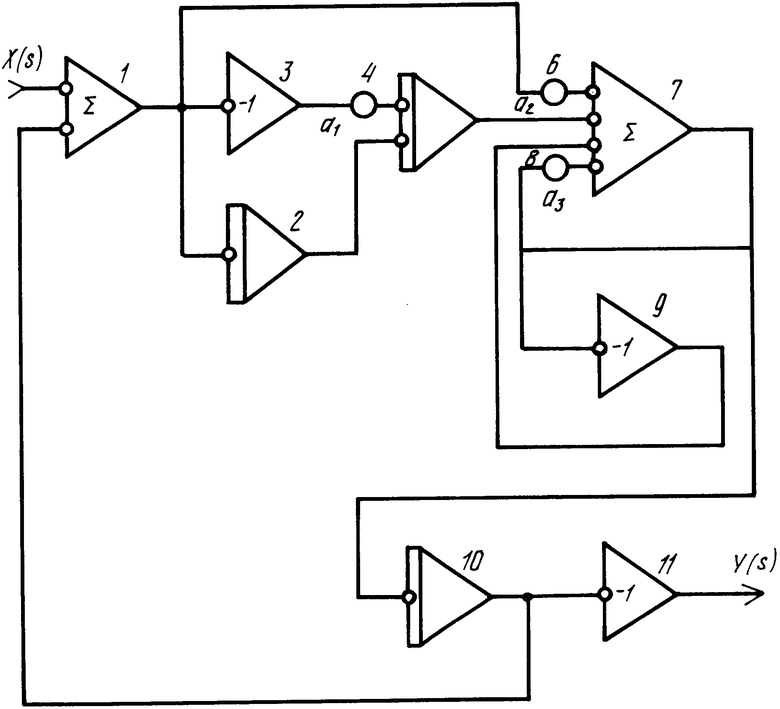
На чертеже представлена электрическая структурная схема сглаживающего фильтра.
Сглаживающий фильтр содержит первый сумматор 1, первый интегратор 2, первый инвертор 3, первый умножитель 4, интегросумматор 5, второй умножитель 6,второй сумматор 7, третий умножитель 8, второй инвертор 9, второй интегратор 10, третий инвертор 11.
Работает сглаживающий фильтр следующим образом.
В исходном состоянии входной сигнал X(р) отсутствует - Хо(р) = 0 (в дальнейшем будем рассматривать сигналы, преобразованные в соответствии с методом Лапласа). В соответствии с нулевыми начальными условиями сигналы на выходах первого интегратора 2, интегросумматора 5 и второго интегратора 10 отсутствуют Х2(р) = Х5о(р) = =Х10о(р) = 0. Следовательно, сигнал на выходе фильтра равен нулю.
Пусть на входе фильтра действует входной сигнал Х(р).
На выходе первого сумматора 1 формируется сигнал вида Х(р)=-Х(р)+Х10(р), на выходе первого интегратора 2-сигнал X2(p)= _  X1(p), на выходе первого интегратора 3 - сигнал Х3(р) = -Х1(р), на выходе интегросумматора 5 - сигнал X5(p) = -
X1(p), на выходе первого интегратора 3 - сигнал Х3(р) = -Х1(р), на выходе интегросумматора 5 - сигнал X5(p) = -  Х2(р) + +а1Х3(р), на выходе второго сумматора 7 - сигнал X7(p)=_
Х2(р) + +а1Х3(р), на выходе второго сумматора 7 - сигнал X7(p)=_ а2Х1(р) + Х5(р), на выходе второго инвертора 9 - сигнал Х9(р) =-Х7(р), на выходе второго интегратора 10 - сигнал X10(p)= _
а2Х1(р) + Х5(р), на выходе второго инвертора 9 - сигнал Х9(р) =-Х7(р), на выходе второго интегратора 10 - сигнал X10(p)= _  X7(p) Х7(р), на выходе третьего инвертора 11 - сигнал Y(р) = Х11(р) = = -Х10(р).
X7(p) Х7(р), на выходе третьего инвертора 11 - сигнал Y(р) = Х11(р) = = -Х10(р).
Следовательно, на выходе интегросумматора 7 формируется сигнал вида
X7(p)=  X(p), на выходе второго интегратора 10
X(p), на выходе второго интегратора 10
 X(p), на выходе фильтра
X(p), на выходе фильтра
Y(p)X11(p)= ·X(p).
·X(p).
Следовательно,сглаживающий фильтр реализует передаточную функцию
F(p)=  =
=  . При этом на выходе интегросумматора 7 формируется сигнал, соответствующий скорости изменения выходного сигнала сглаживающего фильтра.
. При этом на выходе интегросумматора 7 формируется сигнал, соответствующий скорости изменения выходного сигнала сглаживающего фильтра.
При этом путем регулировки первого 4, второго 6 и третьего 8 умножителей реализуется прямая взаимно независимая перестройка параметров передаточной функции.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ОДНООСНОГО СИЛОВОГО СТАБИЛИЗАТОРА | 1989 |
|
RU2022362C1 |
| Устройство для моделирования структурно-компенсированного фильтра с передаточной функцией F(р) = @ | 1990 |
|
SU1714628A1 |
| Активный перестраиваемый режекторный фильтр | 1989 |
|
SU1739479A1 |
| Активный перестраиваемый фильтр второго порядка | 1989 |
|
SU1758833A1 |
| Устройство для моделирования передаточной функции вида @ | 1987 |
|
SU1553953A1 |
| Устройство для моделирования линейных динамических звеньев с передаточной функцией | 1989 |
|
SU1737436A1 |
| Устройство для моделирования колебательного звена | 1987 |
|
SU1476499A1 |
| Активный полосовой фильтр | 1990 |
|
SU1758835A1 |
| Устройство для моделирования передаточной функции вида @ | 1982 |
|
SU1076920A1 |
| УПРАВЛЯЕМЫЙ ГЕНЕРАТОР КВАДРАТУРНЫХ СИГНАЛОВ | 2014 |
|
RU2551824C1 |
Использование: радиотехника в сглаживающих фильтрах систем управления и измерительных устройств. Сущность изобретения: сглаживающий фильтр содержит два сумматора, два интегратора, три инвертора, три умножителя, интегросумматор. 1 ил.
СГЛАЖИВАЮЩИЙ ФИЛЬТР, содержащий интегросумматор, первый сумматор, первый и второй интеграторы, первый инвертор, а также первый, второй и третий умножители, отличающийся тем, что, с целью упрощения перестройки путем обеспечения взаимонезависимости перестройки параметров передаточной функции, введены второй сумматор, первый и второй входы которого соединены с выходами соответственно второго и третьего умножителей, второй инвертор, вход которого соединен с входами второго интегратора, третьего умножителя и выходом второго сумматора, а выход - соединен с третьим входом второго сумматора, четвертый вход которого соединен с выходом интегросумматора, первый вход которого через последовательно соединенные первый инвертор и первый умножитель соединен с входом второго умножителя, выходом первого сумматора и с входом первого интегратора, выход которого соединен с вторым входом интегросумматора, а третий инвертор, выход которого является выходом сглаживающего фильтра, а вход - соединен с выходом второго интегратора и с первым входом первого сумматора, второй вход которого является входом сглаживающего фильтра.
| Горбацевич Е.А., Левинзон Ф.Ф | |||
| Аналоговое моделирование систем управления | |||
| М.: Наука, 1984, с.104, рис.4.7. |
