5
Изобретение относится к аналоговой вычислительной технике и может быть использовано при построении систем .автоматического регулирования и при их моделировании.
Целью изобретения является повышение точности и упрощение процедуры настройки параметров за счет обеспечения единых органов установки и перестройки величин значений для каждой пары коэффициентов передаточной функции и независимой регулировки пар козффициентов между собой.
На чертеже показана структурная схема предлагаемого устройства, реализованная на операционных усилителях.
Устройство состоит из первого 1 и второго 5 сумматоров, первого 3, второго 7 и третьего 10 интеграторов, первого 4, второго 6, третьего 9 и четвертого 11 инверторов,первого 2, второго 8 и третьего 12 масштабирующих элементов, отображающих соответственно параметры ai, аа и аз передаточной функции.
В статическом состоянии вход устройства соединен с первым входом первого сумматора 1, выход которого соединен через первый масштабирующий элемент 2 с первым входом.вторрго сумматора 5 и через первый интегратор 3 с входом первого инвертора 4, выход которого соединен с третьим входом второго сумматора 5, выход которого соединен через третий масштабирующий элемент 12 с четвертым входом второго сумматора 5 и входом цепи, состоящей из последовательно соединенных второго инвертора б, второго интегратора 7, третьего инвертора 9, третьего интегратора 10, выход которого является выходом устройства, и четвертого инвертора 11, выход которого соединен с вторым входом первого сумматора 1, при этом выход второго инвертора 6 соединен с пятым входом второТо сумматора 5, а выход второго интегратора 7 соединен через второй масштабирующий элемент 8 с вторым входом второго сумматора 5.
Устройство работает следующим образом.
Входной сигнал устройства обозначен через Х(Р) (в дальнейшем рассматриваются сигналы, отображенные по методу Лапласа), выходной сигнал устройства - через Y(P). В исходном состоянии входной сигнал отсутствует, а напряжение на выходах каждого интегратора в соответствии с нулевыми начальными условиями равно нулю, напряжения на выходах сумматоров и инверторах равны нулю, следовательно, сигнал на выходе устройства отсутствует. На
выходе первого сумматора 1 формируется сигнал вида Xi(P)-{Х(Р) + Xii(P), на выходе первого интегратора 3 - сигнал вида ХзР
- Xi{P), на выходе первого инвертора 4 Р
сигнал вида Х4(Р) -Хз(Р), на выходе второго
сумматора 5 - сигнал вида XsCP) -{а i Xi(P) +
+X/i(P) -t- a2X7(P) + Хб(Р) + азХбСР). на выходе
второго инвертора 6 - сигнал вида Хб(Р)
-Х5(Р), на выходе второго интегратора 7 сигнал вида Х7(Р)- Хб (Р), на выходе
третьего инвертора 9 - сигнал вида Х9(Р) -Х7(Р), на выходе третьего интегратора 10 сигнал вида Xio(P) -р Х9(Р), который является выходным сигналом Y(P) Xio(P), на выходе четвертого инвертора 11- сигнал, видаХ11(Р) -Х1о(Р).
Проведя соответствующие математические преобразования, получаем.
1 +aiP
Y (Р)
х(Р)агР + азР 1+aiP
Следовательно, передаточная функция уст|)ойства имеет вид
F(p) ViP)
V - YfP . . . 1
Х(Р) 1 +aiP
При этом на выходе второго сумматора 5 формируется вида РУ{Р), а на выходе второго интегратора 7 - сигнал вида РУ(Р). 0
Формул а изобретени я Устройство для моделирования структурно-компенсированного фильтра с передаточной функцией F (Р)
51 4-aiP
, содержащее пер1 +а1Р+а2Р +азР
вый сумматор, первый вход которого является входом устройства, а выход соединен
через первый масштабирующий элемент с первым входом второго сумматора и через первый интегратор - с входом первого инвертора, второй масштабирующий элемент, выход второго сумматора соединен с входом цепи, состоящей из последовательно соединенных второго инвертора, второго интегратора, третьего инвертора, выход которого является выходом устройства, и четвертого инвертора, выход которого соединен с вторым входом первого сумма5 17146286
тора, при этом выход второго интегратораинвертора соединен с третьим входом вточерез третий масштабирующий элемент со-рого сумматора, выход которого через треединен с вторым входом второго суммато-тий масштабирующий элемент соединен с
ра, отличающееся тем, что, с цельючетвертым входом второго сумматора, а выповышения точности и упрощения процеду-5 ход второго инвертора - с пятым входом
ры настройки параметров, выход первоговторого сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СГЛАЖИВАЮЩИЙ ФИЛЬТР | 1991 |
|
RU2019026C1 |
| Устройство для моделирования передаточной функции вида @ | 1987 |
|
SU1553953A1 |
| Устройство для моделирования линейных динамических звеньев с передаточной функцией | 1989 |
|
SU1737436A1 |
| Система автоматического регулирования | 1979 |
|
SU930232A2 |
| Ассоциативное запоминающее устройство | 1990 |
|
SU1765848A2 |
| Устройство для встроенного тестового контроля | 1986 |
|
SU1324029A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2169926C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ОДНООСНОГО СИЛОВОГО СТАБИЛИЗАТОРА | 1989 |
|
RU2022362C1 |
| Измеритель электрофизических характеристик МДП-структур | 1980 |
|
SU924635A1 |
| ПРОГРАММИРУЕМЫЙ ЦИФРОВОЙ ФИЛЬТР | 1992 |
|
RU2057364C1 |
Изобретение относится к аналоговой вычислительной технике. Цель изобретения - повышение точности и упрощение процедуры настройки параметров. Она достигнута сочетанием методов канонической формы и неявной функции при моделировании дифференциальных уравнений, а также использованием сумматора 5 с единичной положительной обратной связью при реализации масштабирующего коэффициента в виде обратной величины. 1 ил.%^»^|Ь^оЮ 00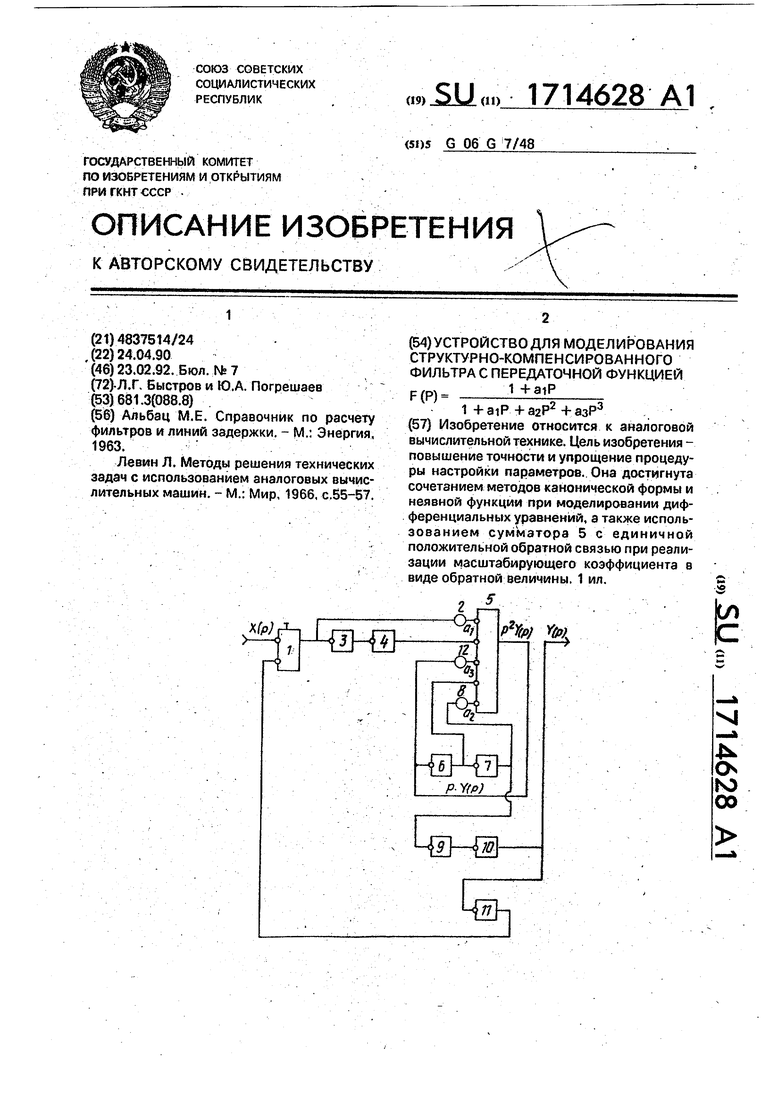
| Альбац М.Е | |||
| Справочник по расчетуфильтров и линий задержки | |||
| - М.: Энергия,1963.Левин Л | |||
| Методы решения технических задач с использованием аналоговых вычислительных машин | |||
| - М.: Мир, 1966, c,S5-57.^ |
