Изобретение относится к измерению неоднородных магнитных полей и предназначено для поисков и разведки полезных ископаемых, а также для пеленгации магнитных объектов естественного и техногенного происхождения.
Известен способ магнитных измерений, предполагающий компенсацию двух компонент магнитной индукции (КМИ) и измерение третьей КМИ по сигналу модульного магнитометра. Устройство для реализации способа содержит модульный магнитометр с двухкомпонентными компенсационными кольцами, ЭВМ, вход которой соединен с выходом модульного магнитометра и блок синхронизации, выход которого соединен с синхронизирующим входом ЭВМ.
Недостаток этого способа и устройства состоит в невысокой информативности, так как измеряется одна КМИ в одной точке.
Известен также способ магнитных измерений, принятый за прототип, включающий компенсацию двух ортогональных КМИ и измерение третьей КМИ по сигналам модульного магнитометра.
Устройство для реализации способа содержит модульный магнитометр, расположенный внутри трехкомпонентных компенсационных колец, а также блок компенсации КМИ, вход которого соединен с выходом модульного магнитометра, а выходы соединены с компенсационными кольцами. Способ и устройство не позволяют измерить вторые производные магнитного потенциала и судить о неоднородности магнитной индукции.
Цель изобретения - обеспечение возможности измерения вторых производных магнитного потенциала.
Указанная цель достигается тем, что при реализации способа магнитных измерений, включающего компенсацию первой и второй компонент вектора магнитной индукции (КМИ) и измерение третьей КМИ в первой точке, одновременно выполняют аналогичные измерения одноименных КМИ во второй и третьей точках, не лежащих на одной прямой с первой точкой, равноудаленных от первой точки в направлениях разноименных КМИ, затем в тех же точках компенсируют первую и третью КМИ и измеряют вторую КМИ, затем компенсируют вторую и третью КМИ и измеряют первую КМИ, запоминают значения КМИ и по измеренным значениям определяют значения компонент тензора градиента магнитной индукции.
Указанная цель достигается тем, что в устройство для магнитных измерений, содержащее модульный магнитометр с трехкомпонентными компенсационными кольцами, блок компенсации КМИ, вход которого соединен с выходом модульного магнитометра, введены два дополнительных модульных магнитометра с трехкомпонентными компенсационными кольцами, блок коммутации, блок вычисления и блок синхронизации, причем все одноименные компенсационные кольца соединены последовательно и подключены через блок коммутации к выходу блока компенсации КМИ, выходы модульных магнитометров соединены с информационными входами блока вычисления, а синхронизирующие входы блока коммутации и блока вычисления соединены с выходами блока синхронизации.
Указанные отличия обеспечивают определение всех трех КМИ и компонент тензора градиента, т. е. дают полную информацию о первой и второй производных магнитного потенциала, благодаря чему расширяются возможности поиска и разведки полезных ископаемых, в частности становится возможной магнитная пеленгация локальных источников магнитного поля, как геологического, так и техногенного происхождения. Повышение информативности реализуется благодаря отличительным признакам устройства для реализации способа.
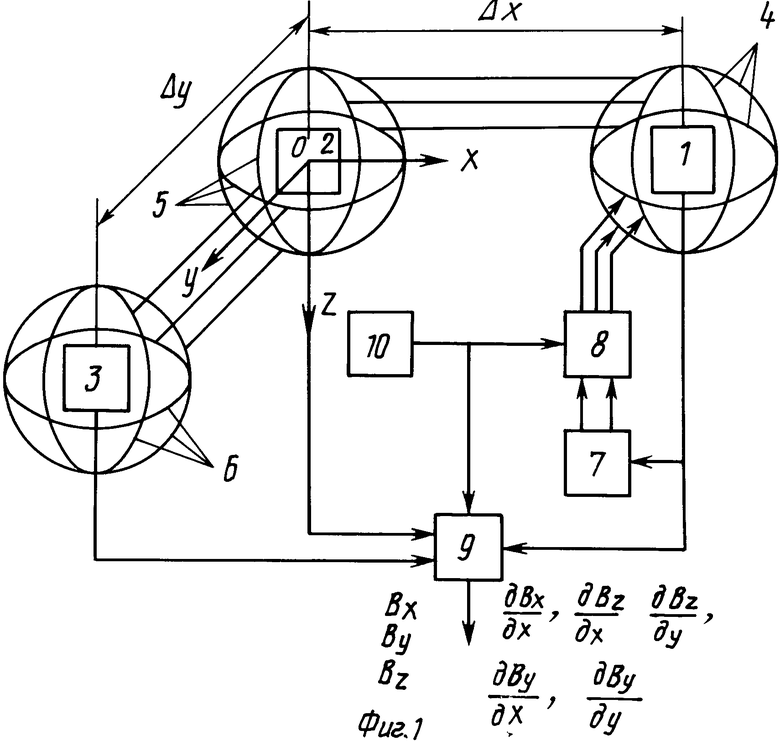
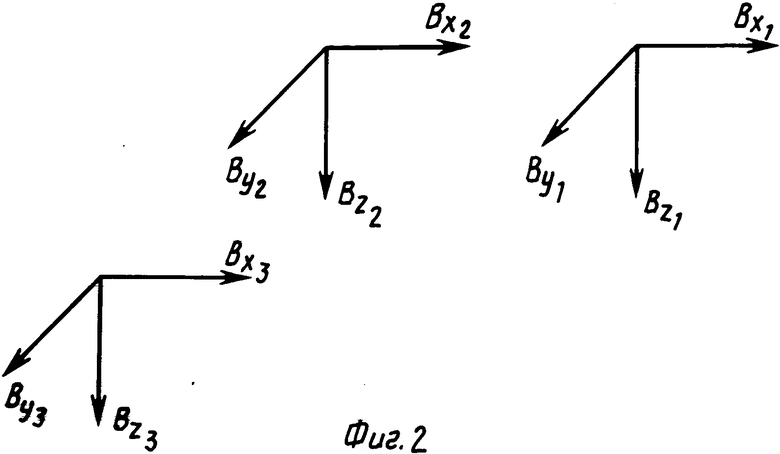
На фиг. 1 приведена функциональная схема одного из возможных вариантов устройства для осуществления способа; на фиг. 2 - схема измерения КМИ - Вх, Ву, Bz - компоненты магнитной индукции в 3-х точках измерений.
Устройство содержит модульные магнитометры 1, 2 и 3, трехкомпонентные компенсационные кольца 4, 5 и 6, блок компенсации КМИ 7, блок коммутации 8, ЭВМ 9 и блок синхронизации 10.
Модульные магнитометры 1, 2 и 3 расположены внутри трехкомпонентных компенсационных колец 4, 5 и 6 соответственно, причем оси одноименных колец параллельны осям прямоугольной системы координат ОХУZ, сами одноименные кольца соединены последовательно и подключены к блоку компенсации КМИ 7 через блок коммутации 8. Выход модульного магнитометра 1 соединен с входом блока компенсации КМИ и с первым входом ЭВМ 9, к двум другим входам которой подключены выходы модульных магнитометров 2 и 3. Синхронизирующие входы блока коммутации 8 и ЭВМ 9 соединены с выходом блока синхронизации 10.
Предлагаемый способ магнитных измерений включает следующие операции и их последовательность:
1. Компенсируют первую и вторую КМИ и измеряют третью КМИ по сигналам модульного магнитометра. В процессе первой операции (см. фиг. 2) компенсируют компоненты Вх и Ву (первую и вторую компоненты) и во всех трех точках измеряют компоненту Вz (третью компоненту).
2. В каждой из трех точек компенсируют первую и третью КМИ и измеряют вторую КМИ. В процессе второй операции компенсируют компоненты Вх и Вz и во всех трех точках измеряют компоненту Ву.
3. Аналогично п. 2 измеряют первую КМИ. В процессе третьей операции компенсируют компоненты Ву и Вz и измеряют во всех трех точках компоненту Вх.
4. Запоминают значения КМИ.
5. Выполняют совместную обработку всей полученной информации и определяют значения КМИ и значения компонент тензора градиента:
Вх, Ву, Вz,  ,
,  ,
,  ,
,  ,
, 
В окрестностях точки наблюдения 0 первая и вторая производная магнитного потенциала статического магнитного поля характеризуется тремя ортогональными компонентами магнитной индукции Вх, Ву и Bz, а также тензором градиента магнитной индукции G, компонентами которого Gijслужат пространственные производные компонент магнитной индукции
gij= 
В силу магнитостатического характера поля (rotB=0 и divB=0), сумма диагональных коэффициентов тензора равна нулю и тензор симметричен. Пренебрегая третьими и более высокими производными магнитного потенциала возможно представить компоненты тензора градиента приближенными выражениями вида =
=  ,
,  =
=  и т.д./
и т.д./
(1) где Δ Вх - разность КМИ Вх в точках на оси ОХ;
Δ Х - расстояние между точками измерений.
Для получения полной информации достаточно выполнить измерения трех КМИ Вх, Ву и Вz в двух точках на оси ОХ и в двух точках на оси ОУ. При известных расстояниях (Δ Х и Δ У) между точками измерений и в соответствии с формулой (1) рассчитать компоненты тензора градиента.
Необходимые для определения Δ Вх, Δ Ву и Δ Вz соотношения рассматриваются на примере измерения в точках 1 и 2.
В процессе выполнения 1-й операции компенсируют КМИ Вх и Ву, при этом нескомпенсированные компоненты в точке 1 Вz, а в точке 2 Δ Вх , Δ Ву и (Вz+ Δ Bz). Измеренные по показаниям модульных магнитометров значения соответственно равны
B = Bz, B
= Bz, B =
= 
В результате выполнения 2, 3 и 4 операции в память ЭВМ записываются такие значения
B = By; B
= By; B =
=  (2).
(2).
B =Bx; B
=Bx; B =
= 
В процессе выполнения 5 операции в соответствии с программой, записанной в память ЭВМ и результатами измерений на основании зависимостей (2) составляют систему уравнений
(3)
И в результате решения системы уравнений (3) определяют значения Δ Вх, Δ Ву и Δ Вz.
В большинстве практических случаев градиенты невелики и соблюдается условие Δ Bi <<Bi. При этом нет необходимости составлять и решать систему уравнений (3), а достаточно ограничиваться приближенным ее решением

Конкретный пример реализации способа в устройстве для его осуществления. Модульные магнитометры выполнены в виде квантовых магнитометров с оптической накачкой самогенерирующего типа и подключенных к их выходам преобразователей частоты в код.
Трехкомпонентные компенсационные кольца могут быть выполнены в виде трехкомпонентных колец Гельмгольца. Все одноименные компенсационные кольца имеют равные постоянные преобразования силы тока в индукцию, соединены последовательно и подключены через блок коммутации к выходу блока компенсации КМИ. Направления осей компенсационных колец ориентированы параллельно осям прямоугольной системы координат ОХУZ. Модульные магнитометры 1 и 3 удалены от модульного магнитометра 2 на равные расстояния Δ Х и Δ У в направлениях разноименных измеряемых КМИ Вх и Ву.
Максимальное расстояние между точками измерений определяется расстоянием до магнитного объекта и допустимой методической погрешностью измерений, а минимальное расстояние взаимным влиянием трехкомпонентных компенсационных катушек на два других модульные магнитометра.
Ограничение сверху обусловлено методическими погрешностями, возникающими за счет влияния высших производных магнитного потенциала.
Расстояние между точками измерений ограничивается пределами:  ≅ ΔX ≅ δg
≅ ΔX ≅ δg  , где М - магнитный момент компенсационных колец, Ам2; Δ В - порог чувствительности магнитометра, нТл; δ g - допустимая методическая погрешность измерений; r - расстояние до магнитного объекта, м.
, где М - магнитный момент компенсационных колец, Ам2; Δ В - порог чувствительности магнитометра, нТл; δ g - допустимая методическая погрешность измерений; r - расстояние до магнитного объекта, м.
Расчетные соотношения (1) (2) и (3) по- лучены для варианта преимущественного расположения точек измерения согласно фиг. 1 (точки 1 и 3 равноудалены от точки 2 в направлениях КМИ Вх и Ву). Однако, в зависимости от конкретных условий магнитных измерений, допустимы и другие варианты расположения точек измерения. Так, например, если в одной из заданных точек расположен локальный источник помех, можно удалить точку измерения в свободную от помехи часть пространства. При этом точки измерения могут располагаться в вершинах равностороннего треугольника или даже в вершинах косоугольного треугольника, что не служит препятствием для определения компонент тензора градиент, однако во втором варианте несколько усложняются расчетные соотношения, а в третьем варианте, кроме того, не соблюдается условие равноточности измерения разноименных компонент тензора градиента, поскольку расстояние Δ Х и Δ У оказываются различными.
Устройство работает следующим образом. По сигналу блока синхронизации 10 блок коммутации 8 подключает к выходу блока компенсации КМИ 7 компенсационные кольца Х и У и при этом в объеме модульных магнитометров компенсируются КМИ Вх и Ву. На выходах модульных магнитометров 1, 2 и 3 формируются электрические сигналы в виде кодов КМИ Bz1 , Bz2 и Bz3, которые поступают на входы ЭВМ 9 и по сигналу блока синхронизации заносятся в блок памяти ЭВМ. Затем по сигналу блока синхронизации к блоку 7 подключаются кольца Х и Z и аналогичным образом в блок памяти ЭВМ заносятся значения By1 , By2 и By3. Затем аналогичным образом компенсируются КМИ Ву и Вz и запоминаются значения Bx1 , Bx2 и Bx3, после чего по сигналу блока синхронизации 10 ЭВМ переключается в режиме вычисления. В соответствии с программой вычислений, заложенной в память ЭВМ, по результатам измерений составляется система уравнений (3), в результате ее решения определяются значения Δ Вх, Δ Ву и Δ В и в соответствии с зависимостями (1) вычисляются пять независимых компонент тензора градиента магнитной индукции. Измеренные значения КМИ Вх, Ву. Вz и значения компонент тензора градиента  ,
,  ,
,  ,
,  и
и  поступают на выход ЭВМ 9, являющийся выходом всего устройства. После этого цикл измерения и вычисления повторяется с периодичностью, заложенной в блоке синхронизации.
поступают на выход ЭВМ 9, являющийся выходом всего устройства. После этого цикл измерения и вычисления повторяется с периодичностью, заложенной в блоке синхронизации.
Полученная в процессе измерений информации полностью характеризует значения первых и вторых производных магнитного потенциала и обеспечивает более полную интерпретацию магнитных аномалий, в том числе, обеспечивает магнитную пеленгацию локальных магнитных объектов геологического или техногенного происхождения. Наличие в устройстве ЭВМ позволяет осуществлять цифровую фильтрацию с целью выделения приращений КМИ и их пространственных производных (компонент тензора (G) на фоне нормального геомагнитного поля и его градиента, а также составлять и решать уравнения магнитной пеленгации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ магнитных измерений и устройство для его осуществления | 1991 |
|
SU1824612A1 |
| СПОСОБ ВЕКТОРНЫХ МАГНИТНЫХ ИЗМЕРЕНИЙ | 1991 |
|
RU2069374C1 |
| ФЕРРОЗОНДОВЫЙ АЭРОМАГНИТОМЕТР | 1991 |
|
RU2019860C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНЫХ ПАРАМЕТРОВ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ | 1989 |
|
RU2075759C1 |
| СПОСОБ МИНИМИЗАЦИИ ПОГРЕШНОСТЕЙ В ДИФФЕРЕНЦИАЛЬНОМ МАГНИТОМЕТРЕ | 2003 |
|
RU2257593C2 |
| НАВИГАЦИОННЫЙ ТРЁХКОМПОНЕНТНЫЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2020 |
|
RU2730097C1 |
| Способ измерения магнитных помех носителя магнитометра | 1991 |
|
SU1803898A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОСТОЯННЫХ ПО МАГНИТНОЙ ИНДУКЦИИ ОБМОТОК ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА | 2005 |
|
RU2282205C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КАЛИБРОВОЧНОЙ МАТРИЦЫ ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА (ВАРИАНТЫ) | 2003 |
|
RU2262711C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ | 2014 |
|
RU2568808C2 |
Использование: в геофизике для измерения неоднородных магнитных полей при поисках и разведке полезных ископаемых, а также для пеленгации магнитных объектов естественного и техногенного происхождения. Сущность изобретения: в трех точках, не лежащих на одной прямой, компенсируют две компоненты вектора магнитной индукции (КМИ) и измеряют третью КМИ по сигналам модульных магнитометров, аналогично в тех же точках измеряют две другие КМИ, по результатам измерений определяют КМИ и компоненты тензора градиента магнитной индукции. Устройство содержит три модульных магнитометра, расположенные в трехкомпонентных коммпенсационных кольцах, блок компенсации КМИ, блок коммутации, блок вычисления и блок синхронизации. 2 с.п. ф-лы, 2 ил.
| 0 |
|
SU274409A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
