Изобретение относится к области измерения индукции магнитного поля с помощью (феррозондовых) трехкомпонентных магнитометров, в частности к прецизионным измерениям индукции.
Прецизионные измерения индукции магнитного поля основаны на выявлении и учете систематических погрешностей измерения. Одной из доминирующих составляющих основной погрешности является статическая погрешность. Эта погрешность снижется или устраняется на этапе калибровки магнитометра при его настройке и/или на последующих этапах поверки (коррекции) магнитометра. Отечественная терминология в этой области не в полной мере соответствует международной. По международному словарю основных терминов в метрологии ИСО, 1993, в результате калибровки выполняется любая из двух родственных операций:
- приписывание показаниям прибора размера единицы измеряемой величины;
- определение коррекции показаний в единицах измеряемой величины.
Например, в первом случае показания приборов на выходе магнитометра в вольтах переводятся в теслы, во втором - менее точные показания в теслах переводятся в более точные показания также в теслах.
Отечественный документ "Рекомендации по межгосударственной стандартизации РМГ 29-99" принял упомянутый словарь за основу, но в отечественной измерительной практике термин "калибровка" по-прежнему понимается в узком пассивном смысле, не включающем в объем понятия термин "коррекция". Достаточно сказать, что "Толковый словарь по метрологии. Основные термины" (Корнеева Т.В., 1990 г., с.133) определяет термин "калибровка средства измерения" как "Поверка средства измерения посредством совокупных измерений". Т.е. русский термин предполагает только первую из двух упомянутых операций международного термина "калибровка". Ниже термин "калибровка" используется в широком смысле, охватывающем термин "коррекция", но иногда дополнительно используется термин "коррекция".
Известно, что статическая погрешность определяется искажающей матрицей трехкомпонентного магнитометра (см. Внучков Г.А. и др. Угловые погрешности измерения магнитной индукции. - В сб. Методы и средства исследования структуры геомагнитного поля. М., ИЗМИРАН, 1989 г., с.161-168). Там же предложен способ определения боковых элементов искажающей матрицы трехкомпонентного магнитометра с помощью трехкомпонентной меры магнитной индукции в условиях, когда магнитометр и мера неортогональны. Однако известный способ не дает возможности определить все элементы искажающей матрицы, а потому не дает возможности найти калибровочную (корректирующую) матрицу по искажающей.
Известен способ калибровки результатов измерения трехкомпонентным магнитометром (см. патент США №6130534, кл. G 01 R 35/00, G 01 R 33/02, 2000 г.), основанный на определении калибровочной (корректирующей) матрицы. Этот способ по совокупности существенных признаков наиболее близок заявляемому и принят за прототип.
Известный способ включает размещение датчика трехкомпонентного магнитометра в центре образцовой трехкомпонентной меры магнитной индукции, строгую ориентацию чувствительных осей магнитометра вдоль осей меры, компенсацию внешнего магнитного поля (например, поля Земли), поочередное воспроизведение известного значения магнитной индукции вдоль каждой оси меры, регистрацию выходных сигналов на выходе магнитометра по всем его компонентам, нормирование выходных сигналов компонент к соответствующему сигналу от меры, построение нормированной приборной квадратной матрицы из нормированных вектор-столбцов выходных сигналов, использование нормированной для нахождения калибровочной матрицы.
Причиной, препятствующей достижению указанного ниже технического результата при использовании известного способа, является практическая невозможность ориентации тройки неортогональных чувствительных осей магнитометра вдоль тройки неортогональных осей меры. В описании известного способа содержится следующая фраза: "Мы помещаем калибруемый датчик трехкомпонентного магнитометра в центре образцовой меры магнитной индукции и тщательно ориентируем его так, чтобы оси магнитометра совпадали с осями меры". При этом прототип не дает ответа на вопросы, как осуществить тщательную ориентацию при работе с неортогональным магнитометром и неортогональной мерой и какая степень тщательности ориентации допустима.
Задачей, на решение которой направлено заявляемое изобретение, является повышение точности определения калибровочной матрицы.
Калибровочная матрица может зависеть от ряда условий (Подробнее см. в разделе Сведения, подтверждающие возможность осуществления изобретения). Это разнообразие условий привело к составлению заявки на способ, состоящий из четырех вариантов, обеспечивающих получение одного и того же технического результата.
Технический результат, получаемый при осуществлении изобретения, состоит в возможности определения калибровочной матрицы магнитометра без тщательной ориентации неортогонального магнитометра в неортогональной мере.
Указанный технический результат достигается при осуществлении заявляемой группы однообъектных изобретений, образующих единый изобретательский замысел и представляющих собой четыре варианта способа определения калибровочной матрицы трехкомпонентного магнитометра.
Указанный технический результат при осуществлении изобретения - способа по 1-му варианту, достигается тем, что в заявляемом способе определения корректирующей матрицы трехкомпонентного магнитометра, включающем размещение датчика магнитометра в центре образцовой трехкомпонентной меры магнитной индукции, ориентацию чувствительных осей магнитометра вдоль осей меры, компенсацию внешнего магнитного поля, воспроизведение мерой точного значения магнитной индукции вдоль каждой ее оси, регистрацию всех компонент результатов измерения на выходе магнитометра, соответствующих магнитному полю, воспроизводимому мерой, построение нормированной приборной матрицы из нормированных вектор-столбцов результатов измерения и использование ее для нахождения калибровочной матрицы, в отличие от известного способа, предварительно, используя независимый модульный магнитометр, измеряют неортогональности осей образцовой меры, по которым строят матрицу осей меры bм в собственной ортогональной системе координат меры, затем в центре меры устанавливают калибруемый трехкомпонентный магнитометр и воспроизводят магнитное поле Вмi поочередно при положительной и отрицательной полярности вдоль каждой оси меры, при этом регистрируют соответствующие результаты измерения трех компонент на выходе магнитометра и определяют нормированную приборную матрицу Пv по формуле
Пv=[(Vuм1+-Vuм1-)/2Вм1 (Vuм2+-Vuм2-)/2Вм2 (Vuм3+-Vuм3-)/2Вм3],
где Vuмi+, Vuмi- - вектор-столбцы результатов измерения напряжения на выходе магнитометра, соответствующие магнитному полю, воспроизводимому мерой при положительной и отрицательной полярности;
затем находят матрицу чувствительности магнитометра Sм, в собственной системе координат меры по формуле
и разлагают ее на произведение
Sм=S·Iм,
где S=(S1 S2 S3) - диагональная матрица чувствительности с размерностью В/Т;
 - матрица единичных чувствительных осей магнитометра в виде вектор-строк Iiм в собственной системе координат меры;
- матрица единичных чувствительных осей магнитометра в виде вектор-строк Iiм в собственной системе координат меры;
с помощью чего определяют три неортогональности осей еij по формуле
eij=(li1lj1+li2lj2+li3lj3)м;
по которым строят матрицу осей магнитометра I0 в его собственной ортогональной системе координат, в которой определяют матрицу чувствительности S0=S·I0 и находят искомую калибровочную матрицу  .
.
Указанный технический результат при осуществлении изобретения - способа по 2-му варианту, достигается тем, что в заявляемом способе определения корректирующей матрицы трехкомпонентного магнитометра, включающем размещение датчика магнитометра в центре образцовой трехкомпонентной меры магнитной индукции, ориентацию чувствительных осей магнитометра вдоль осей меры, компенсацию внешнего магнитного поля, воспроизведение мерой точного значения магнитной индукции вдоль каждой ее оси, регистрацию всех компонент результатов измерения на выходе магнитометра, соответствующих магнитному полю, воспроизводимому мерой, построение нормированной приборной матрицы из нормированных вектор-столбцов результатов измерения и использование ее для нахождения калибровочной матрицы, в отличие от известного способа, предварительно, используя независимый модульный магнитометр, измеряют неортогональности осей образцовой меры, по которым строят матрицу осей меры bм в собственной ортогональной системе координат меры, затем в центре меры устанавливают калибруемый трехкомпонентный магнитометр и воспроизводят магнитное поле Вмi поочередно при положительной и отрицательной полярности вдоль каждой оси меры, при этом регистрируют соответствующие результаты измерения трех компонент на выходе магнитометра и определяют нормированную приборную матрицу Пv по формуле
Пv=[(Vuм1+-Vuм1-)/2Вм1 (Vuм2+-Vuм2-)/2Вм2 (Vuм3+-Vuм3-)/2Вм3],
где Vuмi+, Vuмi- - вектор-столбцы результатов измерения напряжения на выходе магнитометра, соответствующие магнитному полю, воспроизводимому мерой при положительной и отрицательной полярности;
затем находят калибровочную матрицу магнитометра Kм в собственной системе координат меры по формуле
и разлагают ее на произведение
Kм=hм·K,
где hм=(h1 h2 h3)м - матрица единичных чувствительных осей магнитометра в виде вектор-столбцов hiм в собственной системе координат меры;
K=(K1 K2 K3) - диагональная калибровочная матрица с размерностью Т/В;
с помощью чего определяют три неортогональности осей μij по формуле
μij=(h1ih1j+h2ih2j+h3ih3j),
по которым строят матрицу осей магнитометра h0 в его собственной ортогональной системе координат, в которой находят искомую калибровочную матрицу Kh0=h0·K.
Указанный технический результат при осуществлении изобретения - способа по 3-му варианту, достигается тем, что в заявляемом способе определения корректирующей матрицы трехкомпонентного магнитометра, включающем размещение датчика магнитометра в центре образцовой трехкомпонентной меры магнитной индукции, ориентацию чувствительных осей магнитометра вдоль осей меры, компенсацию внешнего магнитного поля, воспроизведение мерой точного значения магнитной индукции вдоль каждой ее оси, регистрацию всех компонент результатов измерения на выходе магнитометра, соответствующих магнитному полю, воспроизводимому мерой, построение нормированной приборной матрицы из нормированных вектор-столбцов результатов измерения и использование ее для нахождения калибровочной матрицы, в отличие от известного способа, используя независимый модульный магнитометр, измеряют неортогональности осей образцовой меры, по которым строят матрицу осей меры bм в собственной ортогональной системе координат меры, затем в центре меры устанавливают испытуемый трехкомпонентный магнитометр и воспроизводят магнитное поле Вмi поочередно при положительной и отрицательной полярности вдоль каждой оси меры, при этом регистрируют соответствующие результаты измерения трех компонент на выходе магнитометра и определяют нормированную приборную матрицу Пв по формуле
Пв=[(Вuм1+-Вuм1-)/2Вм1 (Вuм2+-Вuм2-)/2Вм2 (Вuм3+-Вuм3-)/2Вм3],
где Вuмi+, Вuмi- - вектор-столбцы результатов измерения магнитной индукции на выходе магнитометра, соответствующие магнитному полю, воспроизводимому мерой при положительной и отрицательной полярности;
затем находят искажающую матрицу магнитометра в собственной системе координат меры им по формуле
и разлагают ее на произведение
им=a·Iм,
где a=(a1 a2 a3) - диагональная матрица безразмерных коэффициентов, незначительно отличающихся от единицы;
- матрица единичных чувствительных осей магнитометра в виде вектор-строк Iiм в собственной системе координат меры;
с помощью чего определяют три неортогональности осей еij по формуле
eij=(li1lj1+li2lj2+li3lj3)м,
по которым строят матрицу осей магнитометра I0 в его собственной ортогональной системе координат, в которой определяют искажающую и0=a·I0 и находят искомую калибровочную матрицу  .
.
Указанный технический результат при осуществлении изобретения - способа по 4-му варианту, достигается тем, что в заявляемом способе определения корректирующей матрицы трехкомпонентного магнитометра, включающем размещение датчика магнитометра в центре образцовой трехкомпонентной меры магнитной индукции, ориентацию чувствительных осей магнитометра вдоль осей меры, компенсацию внешнего магнитного поля, воспроизведение мерой точного значения магнитной индукции вдоль каждой ее оси, регистрацию всех компонент результатов измерения на выходе магнитометра, соответствующих магнитному полю, воспроизводимому мерой, построение нормированной приборной матрицы из нормированных вектор-столбцов результатов измерения и использование ее для нахождения калибровочной матрицы, в отличие от известного способа, предварительно, используя независимый модульный магнитометр, измеряют неортогональности осей образцовой меры, по которым строят матрицу осей меры bм в собственной ортогональной системе координат меры, затем в центре меры устанавливают испытуемый трехкомпонентный магнитометр и воспроизводят магнитное поле Вмi поочередно при положительной и отрицательной полярности вдоль каждой оси меры, при этом регистрируют соответствующие результаты измерения трех компонент на выходе магнитометра и определяют нормированную приборную матрицу Пв по формуле
Пв=[(Вuм1+-Вuм1-)/2Вм1 (Вuм2+-Вuм2-)/2Вм2 (Вuм3+-Вuм3-)/2Вм3],
где Вuмi+, Вuмi- - вектор-столбцы результатов измерения магнитной индукции на выходе магнитометра, соответствующие магнитному полю, воспроизводимому мерой при положительной и отрицательной полярности;
затем находят калибровочную матрицу магнитометра в собственной системе координат меры kм по формуле
и разлагают ее на произведение
kм=hм·k,
где hм=(h1 h2 h3)м - матрица единичных чувствительных осей магнитометра в виде вектор-столбцов hiм в собственной системе координат меры;
k=(k1 k2 k3)м - диагональная матрица безразмерных коэффициентов ki;
затем определяют три неортогональности осей магнитометра μij по формуле
μij=(h1ih1j+h2ih2j+h3ih3j),
по которым строят матрицу осей магнитометра h0 в его собственной ортогональной системе координат, в которой находят искомую калибровочную матрицу kh0=h0·k.
На чертеже изображена блок-схема реализации предлагаемого способа определения калибровочной матрицы трехкомпонентного магнитометра.
Блок-схема включает образцовую трехкомпонентную меру 1 магнитной индукции (МИ), в рабочей области которой вначале помещен модульный магнитометр 2 на этапе определения неортогональностей меры, затем - датчик 3 калибруемого трехкомпонентного магнитометра. Датчик 3 подключен к измерительному каналу магнитометра 4, выход которого связан с входом компьютера 5 для расчета калибровочных матриц трехкомпонентного магнитометра 3, 4 и для реализации процедур калибровки. Выход модульного магнитометра 2 также связан с входом компьютера 5.
Заявляемый способ определения корректирующей матрицы трехкомпонентного магнитометра осуществляется следующим образом.
В центральной зоне образцовой трехкомпонентной меры 1 магнитной индукции компенсируют магнитные поля Земли и других внешних источников. В рабочую зону меры 1 помещают модульный магнитометр 2 и создают мерой поочередно комбинации полей
В+x+y=Bx+By В-x+y=-Bx+By
В+x-y=Bx-By В-x-y=-Bx-By
модули которых измеряют прецизионным модульным магнитометром 2. Неортогональность меры 1 между ее осями 1 и 2 определяют (см. аналог Угловые погрешности измерения...) по формуле

Аналогично определяют остальные неортогональности Е13 по комбинации полей Вх и Вz и Е23 по комбинации Ву и Вz.
Затем в рабочую зону помещают датчик 3 калибруемого трехкомпонентного магнитометра 4, оси которого ориентируют вдоль осей меры, после чего вдоль каждой оси меры 1 по очереди воспроизводят мерой точно известное значение магнитного поля Вмi или (Вм1 Вм2 Вм3) при положительной и отрицательной полярности, при этом измеряют на выходе магнитометра 4 или соответствующие вектор-столбцы напряжения Vuм+=(Vuм1 Vuм2 Vuм3)+ и Vuм-=(Vuм1 Vuм2 Vuм3)-, или соответствующие вектор-столбцы магнитной индукции Вuм+=(Вuм1 Вuм2 Вuм3)+ и Вuм-=(Вuм1 Вuм2 Вuм3)-.
Результаты измерения модульным магнитометром 2 (или заранее определенные неортогональности меры 1 Е12, Е13, Е23), значения полей, воспроизводимые мерой 1, Вмi, соответствующие результаты измерения на выходе магнитометра 4 Vuм+, Vuм- или Вuм+, Вuм- заносятся в компьютер 5. Компьютер 5 осуществляет нормирование результатов измерения, построение нормированной приборной матрицы
Пv=[(Vuм1+-Vuм1-)/2Вм1 (Vuм2+-Vuм2-)/2Вм2 (Vuм3+-Vuм3-)/2Вм3],
или
Пв=[(Вuм1+-Вuм1-)/2Вм1 (Вuм2+-Вuм2-)/2Вм2 (Вuм3+-Вuм3-)/2Вм3].
и вычисление по заданным нормированной матрице и неортогональностям меры варианта калибровочной матрицы магнитометра 3, 4:
K0l - в выбранной собственной системе координат магнитометра (0) на магниточувствительных осях магнитометра типа (l), если результат измерения на выходе магнитометра задан в вольтах (вариант 1);
Kh0 - на магниточувствительных осях магнитометра типа (h) в выбранной собственной системе координат магнитометра (0), если результат измерения на выходе магнитометра задан в вольтах (вариант 2);
k0l - в выбранной собственной системе координат магнитометра (0) на магниточувствительных осях магнитометра типа (l), если результат измерения на выходе магнитометра задан в теслах (вариант 3);
kh0 - на магниточувствительных осях магнитометра типа (h) в выбранной собственной системе координат магнитометра (0), если результат измерения на выходе магнитометра задан в теслах (вариант 4).
После определения калибровочной матрицы магнитометр 3, 4 вынимают из меры 1 и последующие результаты измерения магнитометром калибруют (и корректируют) по схеме
B0l=K0l·(Vu-V0) или Bh0=Kh0·(Vu-V0)
B0l=k0l·(Bu-B0) или Bh0=kh0·(Bu-B0),
где В0l, Вh0 - действительные значения измеряемой величины в собственной ортогональной системе координат магнитометра соответственно (0l) или (h0);
 результат измерения в вольтах;
результат измерения в вольтах;  результат измерения в теслах;
результат измерения в теслах;
V0, В0 - уходы нуля магнитометра соответственно в вольтах и в теслах.
Во всех вариантах вышеприведенной схемы основным корректирующим объектом являются та или другая калибровочная матрица. Очевидно, что калибровочные матрицы K0l, Kh0 имеют размерность (Т/В), а калибровочные матрицы k0l, kh0 - безразмерны. Варианты 1 и 2 соответствуют случаю, когда результаты измерения на выходе магнитометра заданы в вольтах и соответственно задана нормированная приборная матрица Пv. Варианты 3 и 4 соответствуют случаю, когда результаты измерения на выходе магнитометра заданы в теслах и соответственно задана нормированная приборная матрица Пв. Различие вариантов 1 и 2 (а также 3 и 4) вызвано тем, что существуют два класса трехкомпонентных (феррозондовых) магнитометров с разнесенными и совмещенными центрами компонент датчиков. Считается, что для одного класса характерны магниточувствительные оси одного вида (Ii), для другого класса - оси другого вида (hi). Подробнее на тему об осях I1, и hi см. ниже.
Процедура определения калибровочной матрицы в собственной ортогональной системе координат магнитометра по измеренным нормированной приборной матрице Пv или Пв и неортогональностям меры Еij неочевидна и нуждается в более подробных пояснениях.
Рассмотрим модель искажений вначале для однокомпонентного магнитометра. Результат измерения однокомпонентным магнитометром Вul′ на некоторое единичное базовое направление l′ можно представить как проекцию измеряемого поля В на некоторую единичную ось магнитометра Ik

где коэффициент Lk учитывает отклонение от единицы в силу несовершенства настройки, нестабильности и несовершенства калибровки однокомпонентного магнитометра,  - собственный уход нуля магнитометра по оси Ik. Другим источником погрешности является не строгое совпадение оси магнитометра Ik с базовой осью l′.
- собственный уход нуля магнитометра по оси Ik. Другим источником погрешности является не строгое совпадение оси магнитометра Ik с базовой осью l′.
Применяя эту однокомпонентную модель к трехкомпонентному магнитометру, получим, что вектор-столбцы результатов измерения Bu, измеряемой индукции В и собственного ухода нулей магнитометра В0 связаны некоторой искажающей матрицей и
Вu=и·В+В0,
т.е. искажающая матрица преобразует ("искажает") по величине и направлению измеряемый вектор (истинная магнитная индукция) в другой вектор (результат измерения минус уход нуля).
Искажающая образуется из произведения диагональной матрицы L коэффициентов искажения, незначительно отличающихся от единицы, на матрицу I, составленную из вектор-строк единичных магниточувствительных осей Ii, магнитометра
Очевидно, что элементы каждой оси Ii зависят от выбора системы координат (СК), в которой эта ось рассматривается, соответственно матрица осей I тоже зависит от выбора СК. В отличие от I, матрица L - диагональная и не зависит от выбора системы координат. Она зависит только от качества настройки, стабильности и калибровки магнитометра. Чем лучше настройка, стабильность и калибровка i-той компоненты, тем ближе безразмерный коэффициент Li к единице. Однако даже строгое равенство Li=1 не гарантирует высокой точности измерения, т.к. в общем случае оси Ii неортогональны между собой и не совпадают полностью с ортами базовой СК. Угловые отклонения осей магнитометра сказываются на точности. Чем ближе матрица и к единичной матрице, тем точнее магнитометр.
Кроме того, результат измерения в теслах - это синтезированная величина, полученная из результата измерения вектор-столбца напряжения Vu на выходе магнитометра с помощью некоторой диагональной матрицы T с размерностью Т/В
Вu=T·Vu
Если в соотношении Т·Vu=и·В+В0, измеряемое поле внешнего происхождение В заменить на поле, воспроизводимое мерой Вмi=Вмibi вдоль ее i-той оси bi, т.е. в положительном направлении, то получим нормированный к модулю поля меры Вмi вектор-столбец Т·Vuмi+/Вмi=и·bi+В0/Вмi. Если поменять полярность поля меры вдоль ее i-той оси, то ее ось меняется на противоположную и Т·Vuмi-/Вмi=-и·bi+В0/Вмi (модуль поля меры Вмi всегда остается со знаком плюс). Построим нормированную приборную матрицу П следующего вида Пv=[(Vuм1+-Vuм1-)/2Вм1 (Vuм2+-Vuм2-)/2Вм2 (Vuм3+-Vuм3-)/2Вм3]
Из вышеприведенных соотношений следует, что
Пv=T-1·и·(b1 b2 b3)=S·b
является произведением матрицы чувствительности магнитометра S=T-1·и=T-1 ·L·I=S·I на матрицу из вектор-столбцов осей меры b=(b1 b2 b3). При этом уходы нулей магнитометра и остаточное внешнее поле взаимокомпенсируются. Обе матрицы S и b должны рассматриваться в одной и той же СК, каждая из них зависит от выбора СК, но их произведение Пv инвариантно к выбору СК. Итак, матрицы сомножители S и b неизвестны, но их произведение предполагается известным. Известны также неортогональности осей меры Еij=bi·bj, но сами оси bi, bj пока неизвестны.
Попытаемся найти матрицу осей меры b в некоторой СК. Для этого выберем такую ортогональную СК меры (ОСКМ), чтобы можно было бы упростить точное выражение всех элементов матрицы осей меры bij через ее неортогональности Eij. Выберем ОСКМ с ортами ijk, например, так, чтобы орт i ОСКМ совпал с осью меры b1, а ось меры b2 лежала в плоскости ортов i, j





В выбранной ОСКМ, которую мы будем именовать собственной ОСКМ и обозначать через индекс "м", вся матрица осей меры bм, следующим образом выражается через ее неортогональности Еij, т.е. через известные величины
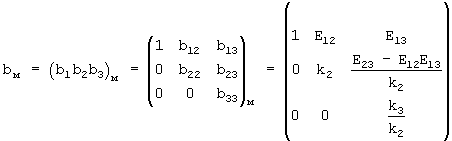
где 

Соотношения выше приведены в качестве примера. Собственную ОСКМ можно было бы выбрать, по крайней мере, девятью равноправными способами и получить похожие выражения матрицы осей через их неортогональности (шесть способов, когда матрица осей имеет три нулевых боковых элемента и еще три способа, когда матрица осей имеет два нулевых элемента, а два ненулевых элемента, симметричных относительно главной диагонали, равны между собой). Т.е. любую тройку неортогональных осей можно выразить точно и просто в одной из 9-ти собственных ортогональных СК через неортогональности осей.
Итак, по найденным неортогональностям меры строят матрицу осей bм в одной из собственных ОСКМ и находят матрицу чувствительности магнитометра в той же ОСКМ по формуле
Очевидно, что найденную матрицу Sм можно однозначно разложить на сомножители: диагональную матрицу S=(S1 S2 S3) и матрицу единичных вектор-строк или осей магнитометра в ОСКМ Iм, Sм=S·Iм, т.е. по известным элементам  можно однозначно определить все элементы матриц S и Iм,
можно однозначно определить все элементы матриц S и Iм,
Iм=S-1·Sм
Матрицу Iм, можно было бы использовать для калибровки (коррекции) в случае, если магнитометр выполнял бы последующие измерения в собственной ОСКМ, т.е. не меняя своей ориентации относительно меры. Но нас интересует возможность калибровки (коррекции) магнитометра, вынутого из меры и произвольно ориентированного, т.е. возможность коррекции в собственной ортогональной СК магнитометра (ОСКМАГ), жестко связанной с датчиком магнитометра.
Для определения ОСКМАГ находят по известной матрице
 неортогональности магнитометра eij=(Ii·Ij)м=(li1lj1+li2lj2+li3lj3)м, так как эти величины инвариантны к выбору СК. Далее по аналогии с вышерассмотренным примером выражения матрицы осей меры bм в одной из собственных ОСКМ выбирают одну из собственных ОСКМАГ и определяют в ней матрицу осей магнитометра I0 (индекс "0" означает принадлежность к собственной ОСКМАГ) через найденные неортогональности осей магнитометра еij.
неортогональности магнитометра eij=(Ii·Ij)м=(li1lj1+li2lj2+li3lj3)м, так как эти величины инвариантны к выбору СК. Далее по аналогии с вышерассмотренным примером выражения матрицы осей меры bм в одной из собственных ОСКМ выбирают одну из собственных ОСКМАГ и определяют в ней матрицу осей магнитометра I0 (индекс "0" означает принадлежность к собственной ОСКМАГ) через найденные неортогональности осей магнитометра еij.
Например, выберем ортонормированный базис ОСКМАГ ijk на осях магнитометра, так чтобы



Откуда получают матрицу осей магнитометра в выбранной ОСКМАГ I0 через найденные неортогональности eij:
где 

По полученным диагональной матрице чувствительности S и матрице осей магнитометра I0 находят искомую калибровочную матрицу K0l в выбранной собственной системе координат магнитометра (0) на его чувствительных осях Ii

где S-1 - диагональная калибровочная матрица с размерностью Т/В не зависит от выбора СК.
Во втором варианте сначала определяют калибровочную матрицу Kм в выбранной ортогональной СК меры

Затем раскладывают ее, в отличие от первого варианта, на произведение матриц вида
Kм=hм·K
где hм=(h1 h2 h3)м - матрица единичных вектор-столбцов hi или матрица других чувствительных осей магнитометра в выбранной собственной ОСКМ;
K=(K1 K2 K3) - диагональная калибровочная матрица коэффициентов с размерностью Т/В, не зависящая от выбора СК.
По найденной матрице hм определяют неортогональности осей
μij=(hi·hj)м=(h1ih1j+h2ih2j+h3ih3j)м
и по найденным неортогональностям по аналогии с вышерассмотренным вариантом выбирают ту или другую собственную ОСКМАГ, в которой строят матрицу осей h0 и находят искомую калибровочную
Kh0=h0·K
В третьем варианте сначала находят искажающую матрицу магнитометра им в выбранной ОСКМ и разлагают ее на произведение диагональной безразмерной матрицы L и матрицы осей Iм

Затем по найденной матрице Iм, определяют неортогональности еij между осями по аналогии с первым вариантом, после чего выбирают собственную ОСКМАГ, в которой по найденным неортогональностям еij строят матрицу осей I0 и определяют искажающую и0=L·I0, по которой находят искомую калибровочную

В четвертом варианте сначала находят калибровочную в ОСКМ kм и разлагают ее на произведение матрицы осей hм и диагональной безразмерной матрицы k

Затем по найденной матрице hм определяют неортогональности μij между осями по аналогии со вторым вариантом, после чего выбирают собственную ОСКМАГ, в которой по найденным неортогональностям μij строят матрицу осей h0 и определяют искомую калибровочную kh0=h0·k.
Калибровочные матрицы K0l и Kh0, а также k0l и kh0 могут не совпадать друг с другом в зависимости от выбора собственной ОСКМАГ на единичных осях Ii или hi.
Если магнитометр имеет несколько диапазонов измерения, то рассмотренную выше процедуру повторяют на каждом диапазоне и соответственно для каждого диапазона находят свою калибровочную и свою корректирующую матрицы. Как правило, несколько диапазонов измерения имеют аналоговые магнитометры, цифровые магнитометры имеют один, реже два диапазона.
В некоторых случаях дополнительно определяют и матрицу связи σ или ортогональную матрицу преобразования координат между выбранными собственными ОСКМ и ОСКМАГ

Это соотношение вытекает из нижеследующего, еще раз поясняющего свойства многих упомянутых матриц,

где σ′ - транспонированная σ, поскольку матрица σ ортогональна, то σ·σ′=I.
Найденная матрица σ характеризует тщательность угловой ориентации испытуемого неортогонального трехкомпонентного магнитометра в неортогональной трехкомпонентной мере.
Для проверки возможностей заявляемого способа в сравнении со способом прототипом с помощью системы автоматизации расчетов MatLab вычислены точностные показатели коррекции в виде максимального элемента матриц
 для способа прототипа,
для способа прототипа,
где  - корректирующая по прототипу, записанная в наших обозначениях;
- корректирующая по прототипу, записанная в наших обозначениях;
 для заявляемого способа
для заявляемого способа
в условиях, характеризуемых максимальными элементами матриц: осей магнитометра  , осей меры
, осей меры  и углового рассогласования между мерой и магнитометром
и углового рассогласования между мерой и магнитометром  . Результаты расчета сведены в таблицу 1.
. Результаты расчета сведены в таблицу 1.



Можно показать, что неблагоприятные условия коррекции для способа прототипа соответствуют неравенству

Как видно из данных таблицы 1, при неблагоприятных условиях коррекция по прототипу не улучшает, а ухудшает точность корректируемого магнитометра. Вместе с тем, данные свидетельствуют о значительных точностных преимуществах заявляемого способа при всех условиях. В частности, заявляемый способ дает возможность осуществлять точную коррекцию без тщательной ориентации неортогонального магнитометра в неортогональной мере.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КОРРЕКТИРУЮЩЕЙ МАТРИЦЫ ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА | 2002 |
|
RU2229727C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОСТОЯННЫХ ПО МАГНИТНОЙ ИНДУКЦИИ ОБМОТОК ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА | 2005 |
|
RU2282205C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ С ВОЗМОЖНОСТЬЮ КАЛИБРОВКИ В ПОЛЕВЫХ УСЛОВИЯХ | 2016 |
|
RU2620326C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ХАРАКТЕРИСТИКИ ПРЕОБРАЗОВАНИЯ ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА | 2011 |
|
RU2481593C9 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ОРИЕНТАЦИИ ТРЕХКОМПОНЕНТНОГО ДАТЧИКА МАГНИТОМЕТРА ОТНОСИТЕЛЬНО МЕРЫ МАГНИТНОГО МОМЕНТА | 2005 |
|
RU2290657C1 |
| СПОСОБ КАЛИБРОВКИ ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА | 2012 |
|
RU2497139C1 |
| Способ измерения приращения индукции магнитного поля дифференциальным магнитометром | 2021 |
|
RU2789143C2 |
| Способ калибровки трехкомпонентного магнитометра | 2017 |
|
RU2654073C1 |
| Способ поверки ортогональности осей компонентного магнитометра | 1986 |
|
SU1343377A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПРИРАЩЕНИЯ ИНДУКЦИИ МАГНИТНОГО ПОЛЯ ТРЕХКОМПОНЕНТНЫМ ДИФФЕРЕНЦИАЛЬНЫМ МАГНИТОМЕТРОМ | 2006 |
|
RU2313801C1 |
Изобретение относится к измерительной технике, а именно к технике измерения индукции магнитного поля трехкомпонентными магнитометрами. Технический результат - повышение точности измерения. Для достижения данного результата дополнительно измеряют неортогональности осей образцовой меры, на основе которых формируют матричные оценки в собственной ортогональной системе координат меры. Затем в центре меры устанавливают калибруемый трехкомпонентный магнитометр и имитируют параметры магнитного поля поочередно при положительной и отрицательной полярности вдоль каждой оси меры. При этом регистрируют соответствующие результаты измерения на выходе магнитометра и определяют нормированные значения искомой приборной матрицы. 4 с.п. ф-лы, 1 ил., 1 табл.
Пv=[(Vuм1+-Vuм1-)/2Вм1(Vuм2+-Vuм2-)/2Вм2(Vuм3+-Vuм3-)/2Вм3],
где Vuмi+, Vuмi- - вектор-столбцы результатов измерения напряжения на выходе магнитометра, соответствующие магнитному полю, воспроизводимому мерой при положительной и отрицательной полярностей;
затем находят матрицу чувствительности магнитометра Sм в собственной системе координат меры по формуле
и разлагают ее на произведение
Sм=S·Iм,
где S=(S1 S2 S3) - диагональная матрица чувствительности с размерностью В/Т;
 - матрица единичных чувствительных осей магнитометра в виде вектор-строк Iiм в собственной системе координат меры;
- матрица единичных чувствительных осей магнитометра в виде вектор-строк Iiм в собственной системе координат меры;
с помощью чего определяют три неортогональности осей еij по формуле:
eij=(li1lj1+li2lj2+li3lj3)м;
по которым строят матрицу осей магнитометра I0 в его собственной ортогональной системе координат, в которой определяют матрицу чувствительности S0=S·I0 и находят искомую калибровочную матрицу  .
.
Пv=[(Vuм1+-Vuм1-)/2Вм1(Vuм2+-Vuм2-)/2Вм2(Vuм3+-Vuм3-)/2Вм3],
где Vuмi+, Vuмi- - вектор-столбцы результатов измерения напряжения на выходе магнитометра, соответствующие магнитному полю, воспроизводимому мерой при положительной и отрицательной полярностях;
затем находят калибровочную матрицу магнитометра Км в собственной системе координат меры по формуле
и разлагают ее на произведение
Км=hм·К,
где hм=(h1 h2 h3)м - матрица единичных чувствительных осей магнитометра в виде вектор-столбцов hiм в собственной системе координат меры;
K=(K1 К2 К3) - диагональная калибровочная матрица с размерностью Т/В;
с помощью чего определяют три неортогональности осей μij по формуле:
μij=(h1ih1j+h2ih2j+h3ih3j),
по которым строят матрицу осей магнитометра h0 в его собственной ортогональной системе координат, в которой находят искомую калибровочную матрицу Кh0=h0·К.
Пв=[(Вuм1+-Вuм1-)/2Вм1 (Вuм2+-Вuм2-)/2Вм2 (Вuм3+-Вuм3-)/2Вм3],
где Buмi+, Buмi- - вектор-столбцы результатов измерения магнитной индукции на выходе магнитометра, соответствующие магнитному полю, воспроизводимому мерой при положительной и отрицательной полярностях;
затем находят искажающую матрицу магнитометра в собственной системе координат меры им по формуле:
и разлагают ее на произведение
им=L·Iм,
где L=(L1 L2 L3) - диагональная матрица безразмерных коэффициентов, незначительно отличающихся от единицы;
- матрица единичных чувствительных осей магнитометра в виде вектор-строк Iiм в собственной системе координат меры;
с помощью чего определяют три неортогональности осей еij по формуле:
eij=(li1lj1+li2lj2+li3lj3)м,
по которым строят матрицу осей магнитометра I0 в его собственной ортогональной системе координат, в которой определяют искажающую и0=L·I0 и находят искомую калибровочную матрицу  .
.
Пв=[(Вuм1+-Вuм1-)/2Вм1(Вuм2+-Вuм2-)/2Вм2(Вuм3+-Вuм3-)/2Вм3],
где Вuмi+, Buмi- - вектор-столбцы результатов измерения магнитной индукции на выходе магнитометра, соответствующие магнитному полю, воспроизводимому мерой при положительной и отрицательной полярностях;
затем находят калибровочную матрицу магнитометра в собственной системе координат меры kм по формуле:
и разлагают ее на произведение
kм=hм·k,
где hм=(h1 h2 h3)м - матрица единичных чувствительных осей магнитометра в виде вектор-столбцов hiм в собственной системе координат меры;
k=(k1 k2 k3)м - диагональная матрица безразмерных коэффициентов ki;
затем определяют три неортогональности осей магнитометра μij по формуле:
μij=(h1ih1j+h2ih2j+h3ih3j),
по которым строят матрицу осей магнитометра h0 в его собственной ортогональной системе координат, в которой находят искомую калибровочную матрицу kh0=h0·k.
| US 6130534 А, 10.10.2000 | |||
| Г.А.Внучков и др | |||
| Угловые погрешности измерения магнитной индукции | |||
| Сб | |||
| "Методы и средства исследования структуры геомагнитного поля" | |||
| - М.: ИЗМИРАН, 1989, с.161-168 | |||
| УСТРОЙСТВО для БЕЗЫНЕРЦИОННОГО ИЗМЕРЕНИЯ | 0 |
|
SU331262A1 |
| Устройство для калибровки магнитометра | 1978 |
|
SU779950A1 |
| GB 1088594 А, 25.10.1967 | |||
| US 4465974 А, 14.08.1984. | |||

