Изобретение относится к области измерения индукции магнитного поля с помощью трехкомпонентных магнитометров, в частности к их калибровке (аттестации, градуировке, поверке, испытаниям), в частности к определению постоянных по магнитной индукции одноименных обмоток компонент магнитометра.
Магнитометры нередко оснащаются встроенными мерами магнитной индукции для оперативного контроля исправности магнитометров. Встроенная мера представляет собой обмотку с известным значением постоянной по магнитной индукции (в теслах, деленных на ампер, Т/А). На каждую компоненту магнитометра своя встроенная мера. При пропускании через обмотку известного (измеренного) значения тока мера воспроизводит магнитную индукцию, равную произведению значения постоянной на значение тока. По разности между значением магнитной индукции, воспроизведенной мерой, и соответствующим показанием магнитометра судят о его исправности.
Известен способ определения постоянной по магнитной индукции обмотки, размещенной на датчике магнитометра (Методические указания. Средства измерения магнитной индукции от 1×10-10 до 5×10-2 Тл образцовые. Методы и средства поверки. РД 50-487-84. Москва. Издательство стандартов. 1985. С.11-13). Известный способ определяет значение постоянной испытуемой обмотки в виде одного числа, тогда как постоянная по магнитной индукции по существу должна характеризоваться тремя числами, поскольку постоянная - величина векторная, так как магнитная индукция - вектор. Вектор постоянной обмотки равен магнитной индукции, создаваемой током, протекающим через эту обмотку, деленной на величину этого тока (Три постоянных должны характеризоваться девятью числами). Чтобы обойти эту проблему, в известном способе применяют тщательную ориентацию оси испытуемой обмотки вдоль оси образцовой меры, когда два числа из трех становятся настолько близки к нулю, что ими можно пренебречь, не определяя их. Эту процедуру повторяют с каждой из трех обмоток трехкомпонентного магнитометра. Кроме значений постоянных, представляют интерес оси обмоток или единичные направления векторов постоянных в некоторой базовой системе координат. Знание осей обмоток открывает возможность аналитического определения матрицы баланса при дифференциальном включении двух трехкомпонентных магнитометров. Известен также способ определения корректирующей матрицы трехкомпонентного магнитометра (Патент RU 2229727 C1, 7 G 01 R 35/00, 33/02, дата публ. 27.05.2004), в котором реализован отказ от тщательной ориентации осей датчика относительно осей образцовой меры за счет измерения всех трех чисел, включая два близких к нулю остаточных сигнала, для определения искомых величин. Этот принцип может быть распространен и на определение постоянных обмоток трехкомпонентного магнитометра. Способ определения постоянных (МУ РД 50-487-84) принят в качестве ближайшего аналога1 (1Кроме ближайшего аналога в разделе осуществление изобретения используются также ссылки на материалы Патента 2229727 под условным для краткости обозначением (см. Патент...).) заявляемого способа по совокупности существенных признаков.
Известный способ включает размещение датчика трехкомпонентного магнитометра в центре образцовой трехкомпонентной меры магнитной индукции, тщательную ориентацию чувствительной оси датчика магнитометра с испытуемой обмоткой вдоль одной из осей образцовой меры, компенсацию внешнего магнитного поля (например поля Земли) в центре меры, воспроизведение мерой магнитной индукции обоих знаков, уравновешивание воспроизведенной индукции магнитным полем тока, пропускаемого через испытуемую обмотку, измерение значения тока, соответствующего уравновешиванию, и вычисление значения постоянной по значениям воспроизведенной индукции и измеренного тока.
Причиной, препятствующей достижению указанного ниже технического результата при использовании известного способа, является невозможность определения осей постоянных по магнитной индукции обмоток трехкомпонентного магнитометра в какой-либо ортогональной системе координат трехкомпонентного магнитометра. Достаточно сказать, что известный способ позволяет определить только три числа постоянных, по одному числу на каждую обмотку (остальные шесть чисел предполагаются нулями), в некоторой неортогональной системе координат, связанной с мерой магнитной индукции. Другими словами известный способ позволяет определить только диагональную матрицу постоянных в некоторой (неопределенной) неортогональной системе координат. При выемке магнитометра из меры связь с такой (неопределенной) системой координат теряется. В дальнейшем используются только три числа постоянных. Т.е. известный способ позволяет определить три значения постоянных, но не позволяет определять оси обмоток в какой-либо доступной ортогональной базовой системе координат.
Задачей, на решение которой направлено заявляемое изобретение, является получение дополнительной информации о постоянных обмоток трехкомпонентного магнитометра в доступной системе координат, сохраняющейся при выемке магнитометра из меры.
Технический результат, получаемый при осуществлении изобретения, заключается в реализации возможности определения осей постоянных в собственной ортогональной системе координат магнитометра в условиях неортогональных осей образцовой меры, неортогональных чувствительных осей магнитометра и осей обмоток магнитометра без необходимости тщательной ориентации трехкомпонентного магнитометра в трехкомпонентной мере.
Указанный технический результат достигается тем, что в заявляемом способе определения постоянных по магнитной индукции обмоток трехкомпонентного магнитометра, включающем размещение датчика магнитометра в центре трехкомпонентной меры магнитной индукции, ориентацию его осей вдоль осей меры, компенсацию внешнего магнитного поля в центре меры, воспроизведение мерой магнитной индукции обоих знаков, уравновешивание воспроизведенной индукции магнитным полем тока, пропускаемого через соответствующую компоненту обмоток, измерение значения тока, соответствующего уравновешиванию и вычисление постоянной по значениям воспроизведенной индукции и измеренного тока, в отличие от известного способа, оси датчика ориентируют приблизительно вдоль осей меры, затем, используя результаты воспроизведения магнитной индукции мерой и результаты измерения ее магнитометром, определяют корректирующую матрицу магнитометра kМАГ и оси меры bМАГ=(b1 b2 b3)МАГ в собственной ортогональной системе координат магнитометра, а также в собственной ортогональной системе координат меры kМ и bM=(b1 b2 b3)М, по которым находят матрицу ортогонального преобразования координат по одной из формул:
где  - обратная bM,
- обратная bM,
или
после чего вновь воспроизводят магнитное поле Вi поочередно того и другого знака вдоль каждой i-той оси меры и уравновешивают его токами обмоток всех трех компонент магнитометра Ii1, Ii2, Ii3 приблизительно, при этом точно измеряют токи и неуравновешенные остатки индукции Δi1, Δi2, Δi3, затем строят матрицы воспроизведенных значений  , соответствующих измеренных токов I=(I1 I2 I3) и остатков
, соответствующих измеренных токов I=(I1 I2 I3) и остатков  , с помощью которых определяют искомые постоянные в собственной ортогональной системе координат магнитометра по формуле:
, с помощью которых определяют искомые постоянные в собственной ортогональной системе координат магнитометра по формуле:

где СМАГ - матрица постоянных;
Сi - постоянная обмотки по i-той компоненте магнитометра.
На чертеже 1 изображена упрощенная схема аппаратурных средств реализации заявляемого способа.
Схема включает образцовую трехкомпонентную меру 1 магнитной индукции, в рабочей области которой помещен трехкомпонентный датчик 2 с испытуемыми (поверяемыми) обмотками 3 трехкомпонентного магнитометра 4, модульный прецизионный магнитометр 5, блок источников токов через обмотки меры 1 и обмотки 3 и средств их регулировки, коммутации и измерения 6.
Заявляемый способ определения постоянных по магнитной индукции обмоток трехкомпонентного магнитометра осуществляется следующим образом.
В центральной зоне меры 1 компенсируют магнитные поля Земли и других внешних источников. В рабочую зону меры 1 помещают модульный магнитометр 5 и создают мерой поочередно комбинации полей
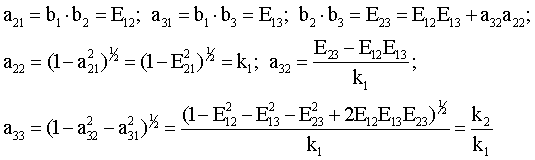
модули которых измеряют прецизионным модульным магнитометром 5. Неортогональность меры измеряют общеизвестным способом. Например, неортогональность меры между осями 1 и 2 (или между осями х и у) определяют по формуле
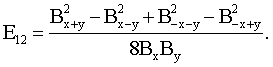
Аналогично определяют остальные неортогональности E13 по комбинации полей Вx и Вz и Е23 по комбинации Вy и Вz.
Выберем ортогональную систему координат так, чтобы ее орт i совпадал с осью 1 образцовой меры 1, а ось 2 меры 1 лежала в плоскости ортов i и j.
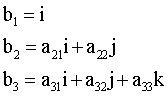
где b1, b2, b3 - соответствующие оси меры 1;
i, j, k - орты выбранной ортогональной (декартовой) системы координат;
а21, а22, а31, а32, а33 - соответствующие коэффициенты разложения осей меры в выбранной системе координат.
Система координат выбрана так, что a11=1, а12=а13=а23=0. Назовем (см. Патент...) выбранную систему координат собственной ортогональной системой координат меры (СОСКМ).
Разумеется, СОСКМ можно было бы выбрать иначе, обращая в нуль другие коэффициенты. Например, а21=а31=а32=0.
Заметим, что ненулевые коэффициенты разложения можно просто выразить через вышеопределенные неортогональности меры Е12, Е13, Е23.
Запишем матрицу осей меры в СОСКМ bM в виде вектор-столбцов осей меры
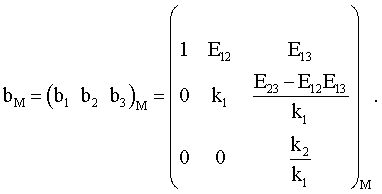
Итак, матрица bM известна, если известны неортогональности меры (см. Патент...).
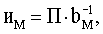
Затем вместо модульного магнитометра 5 ставят трехкомпонентный магнитометр 2 и ориентируют его приблизительно вдоль осей меры 1. После чего воспроизводят мерой магнитное поле ВMi поочередно при положительной и отрицательной полярности вдоль каждой оси меры, при этом регистрируют соответствующие результаты измерения всех компонент магнитометром 2, по которым определяют нормированную приборную матрицу П (см. Патент...) по формуле:

где Виi+, Виi- -результаты измерения магнитометром трех компонент магнитного поля, воспроизводимого мерой ВMi при положительной и отрицательной полярности. Приборная матрица является произведением двух матриц (см. Патент...):

где иM, иМАГ - искажающая матрица магнитометра соответственно в СОСКМ и в СОСКМАГ - собственной ортогональной системе координат магнитометра;
bМ, bМАГ - матрица осей меры соответственно в СОСКМ и в СОСКМАГ.
По заданным матрицам П и bM находят искажающую магнитометра в СОСКМ
где - обратная матрица bM,
и корректирующую магнитометра в СОСКМ

Искажающая матрица магнитометра 2, в свою очередь, является произведением двух матриц (см. Патент...):

где а - диагональная матрица остаточных калибровочных коэффициентов магнитометра;
lM - матрица из вектор-строк магниточувствительных осей магнитометра.
По найденной иM определяют диагональные элементы матрицы а по формуле:
и неортогональности магниточувствительных осей магнитометра по формуле:

где иijM - элементы матрицы иM;
eij - неортогональность i-той и j-той осей.
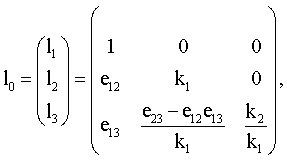
По аналогии с вышеописанной процедурой выбора СОСКМ выбирают СОСКМАГ и с помощью определенных неортогональностей е12, е13, е23 строят матрицу осей магнитометра в СОСКМАГ l0:
находят искажающую:

и корректирующую матрицу магнитометра в СОСКМАГ:
Затем определяют матрицу осей меры в СОСКМАГ:
и матрицу ортогонального преобразования координат из СОСКМ в СОСКМАГ по формуле:
или по формуле:
Далее воспроизводят мерой магнитное поле по очереди вдоль каждой оси меры 1 и уравновешивают его полями токов, пропускаемых через обмотки 3 магнитометра 2. При этом измеряют токи обмоток 3 в момент равновесия с помощью средств измерения 6 и некомпенсированные остатки индукции по выходным приборам магнитометра 3. Затем составляют уравнение равновесия в СОСКМАГ:

где s - ортогональная матрица преобразования координат из СОСКМ в СОСКМАГ;
 - матрица воспроизведенных мерой индукций в СОСКМ, Тл;
- матрица воспроизведенных мерой индукций в СОСКМ, Тл;
 - матрица постоянных по магнитной индукции обмоток 3 магнитометра 2 в СОСКМАГ, Тл/А;
- матрица постоянных по магнитной индукции обмоток 3 магнитометра 2 в СОСКМАГ, Тл/А;
 - матрица токов в момент равновесия, А;
- матрица токов в момент равновесия, А;
kМАГ - корректирующая матрица магнитометра в СОСКМАГ;
 - матрица измеренных неуравновешенных остатков, Тл;
- матрица измеренных неуравновешенных остатков, Тл;
 - вектор-столбец токов в момент равновесия с остатком
- вектор-столбец токов в момент равновесия с остатком 
Отсюда находят искомые постоянные обмоток в СОСКМАГ, Тл/А:

модули постоянных, Тл/А:

и оси обмоток:

Для проверки заявляемого способа с помощью системы МатЛаб осуществлено компьютерное моделирование его в сравнении с известным способом.
Ниже с целью иллюстрации приводятся некоторые результаты моделирования.
Определенные по известному способу значения постоянных трех обмоток магнитометра при поочередной ориентации каждой оси магнитометра в мере с погрешностью в несколько угловых минут:

Определенные по заявляемому способу матрицы постоянных, матрицы осей обмоток и значения постоянных:
- при погрешности ориентации до одного градуса:
в СОСКМ:

в СОСКМАГ:

- при погрешности ориентации до трех градусов:
в СОСКМ:

в СОСКМАГ:
Таким образом, как показывают расчеты, заявляемый способ позволяет определить матрицу постоянных (слева от знака равенства) и матрицу осей обмоток (первая справа от знака равенства) магнитометра в СОСКМ и СОСКМАГ, а также значения постоянных (вторая матрица справа от знака равенства) при нетщательной ориентации датчика трехкомпонентного магнитометра в образцовой мере. Известный способ позволяет определить только значения постоянных при достаточно тщательной ориентации поочередно каждой оси датчика в мере.
Обратим внимание на различие матриц постоянных в СОСКМ при разных ориентациях датчика. В СОСКМАГ эти матрицы не зависят от ориентации датчика в мере. Несмотря на различие матриц осей, все длины осей равны единице, а скалярные произведения соответствующих осей одинаковы:

Рассмотрим еще одну расчетную иллюстрацию: влияние корректирующей матрицы магнитометра. Если ею пренебречь в заявляемом способе, то модули найденных постоянных будут отличаться от точных значений (см. точные значения выше). Например,
Степень отличия от точных значений может быть больше или меньше в зависимости от тщательности уравновешивания токами.
Таким образом, введение корректирующей матрицы является существенным признаком заявляемого способа, обеспечивающим точность, независимо от тщательности уравновешивания токами.
Изобретение относится к измерительной технике, в частности к определению динамических характеристик трехкомпонентного магнитометра. Технический результат - расширение функциональных возможностей. Для достижения данного результата магнитометр помещают в трехкомпонентную меру магнитной индукции и определяют оси меры в собственных ортогональных системах координат меры и магнитометра. При этом определяют матрицу преобразования координат между ними. Затем поле меры уравновешивают полем испытуемых обмоток магнитометра. С помощью результатов уравновешивания определяют динамические характеристики обмоток трехкомпонентного магнитометра в собственной ортогональной системе координат магнитометра. 1 ил.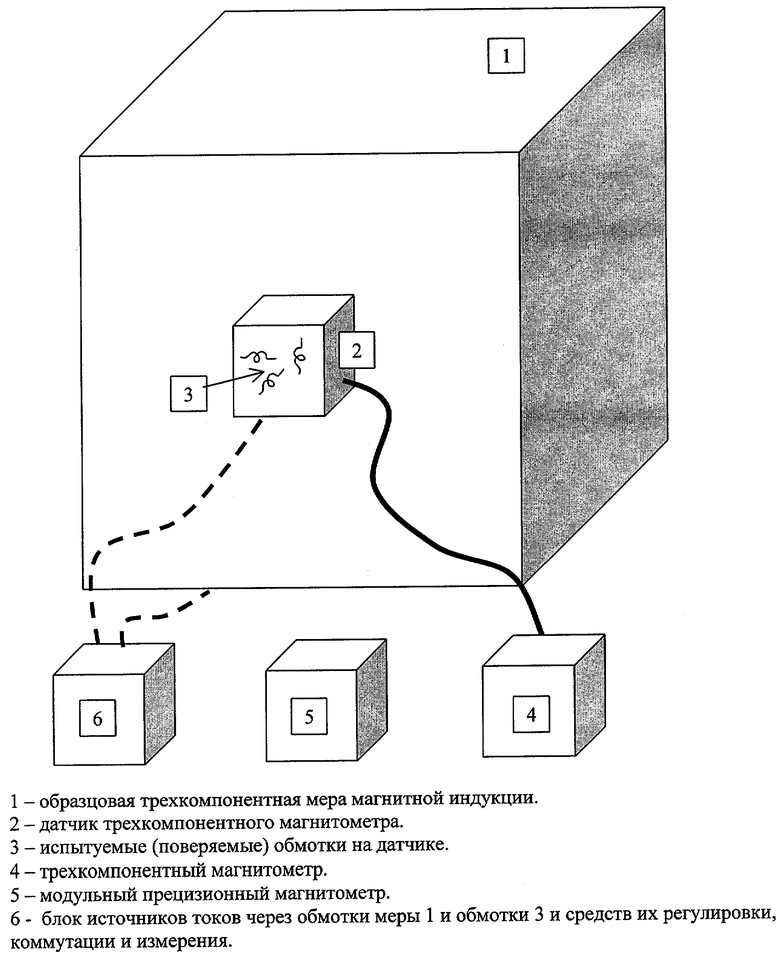
Способ определения постоянных по магнитной индукции обмоток трехкомпонентного магнитометра, включающий размещение датчика магнитометра в центре трехкомпонентной меры магнитной индукции, ориентацию его осей вдоль осей меры, компенсацию внешнего магнитного поля в центре меры, воспроизведение мерой магнитной индукции обоих знаков, уравновешивание воспроизведенной индукции магнитным полем тока, пропускаемого через соответствующую компоненту обмоток, измерение значения тока, соответствующего уравновешиванию, и вычисление постоянной по значениям воспроизведенной индукции и измеренного тока, отличающийся тем, что оси датчика ориентируют приблизительно вдоль осей меры, затем, используя результаты воспроизведения магнитной индукции мерой и результаты измерения ее магнитометром, определяют корректирующую матрицу магнитометра kмаг и оси меры bмаг=(b1 b2 b3)МАГ в собственной ортогональной системе координат магнитометра, а также в собственной ортогональной системе координат меры kм и bM=(b1 b2 b3)M, по которым находят матрицу ортогонального преобразования координат по одной из формул:
где  - обратная bм,
- обратная bм,
или

после чего вновь воспроизводят магнитное поле Вi поочередно того и другого знака вдоль каждой i-той оси меры и уравновешивают его токами обмоток всех трех компонент магнитометра Ii1, Ii2, Ii3 приблизительно, при этом точно измеряют токи и неуравновешенные остатки индукции Δi1, Δi2, Δi3, затем строят матрицы воспроизведенных значений  , соответствующих измеренных токов I=(I1 I2 I3) и остатков
, соответствующих измеренных токов I=(I1 I2 I3) и остатков  , с помощью которых определяют искомые постоянные в собственной ортогональной системе координат магнитометра по формуле
, с помощью которых определяют искомые постоянные в собственной ортогональной системе координат магнитометра по формуле
смаг=(С1 С2 C3)МАГ=(sBM-kМАГΔ)I-1,
где смаг - матрица постоянных;
Сi - постоянная обмотки по i-той компоненте магнитометра.
| Устройство для выпрямления многофазного тока | 1923 |
|
SU50A1 |
| Москва | |||
| Издательство стандартов | |||
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОРРЕКТИРУЮЩЕЙ МАТРИЦЫ ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА | 2002 |
|
RU2229727C1 |
| Г.А.Внучков и др | |||
| Угловые погрешности измерения магнитной индукции | |||
| Сб | |||
| "Методы и средства исследования структуры геомагнитного поля" | |||
| - М.: ИЗМИРАН, 1989, с.161-168 | |||
| MARSHALL B.J | |||
| Operational Aspects of Magnetic Measurement Ranges | |||
| Naval Forces, 1989, v.10 2, p.72-78 | |||
| Б.М.Яновский | |||
| Земной магнетизм | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Изд-во Ленинградского университета, с.81 | |||
| US 2001033159 A1, 25.10.2001. | |||

