Изобретение относится к космической технике и может быть использовано для разгрузки системы силовых гироскопов (СГ) космических аппаратов от накопленного кинетического момента.
Для современных космических аппаратов (КА) характерно широкое применение в системах ориентации инерционных исполнительных органов - силовых гироскопов. Они позволяют значительно уменьшить расход массы рабочего тела на борту КА при выполнении программы полета, однако требуют постоянной или периодической разгрузки от накопленного кинетического момента. Один из наиболее эффективных способов разгрузки основан на приложении к корпусу КА внешнего момента магнитных сил, получаемого от взаимодействия магнитного поля небесного тела со свойственным самому КА магнитным моментом.
Известен способ разгрузки системы СГ, КА, заключающийся в измерении индукции магнитного поля Земли (МПЗ), измерении кинетического момента, накопленного в системе СГ, определении необходимых для разгрузки проекций магнитного момента системы магнитных исполнительных органов (МИО), формирование магнитного момента в МИО, который, взаимодействуя с МПЗ, создает момент сил, разгружающий системы СГ [1]. Использование специальных МИО приводит к большим потреблениям электроэнергии и снижает массу полезной нагрузки, выводимой на орбиту.
Известен способ разгрузки системы СГ от накопленного кинетического момента с помощью момента от сил светового давления, причем с использованием поворотных плоскостей солнечных батарей (СБ). Указанный способ разгрузки системы СГ, как наиболее близкий по технической сути к предлагаемому изобретению, принимается авторами за прототип. Суть способа заключается в ориентации плоскостей управляемых солнечных батарей (СБ) на Солнце для получения электрического тока, измерении вектора кинетического момента в системе СГ ( ), развороте управляемых плоскостей СБ для создания пропеллерного момента, от взаимодействия солнечного ветра с поверхностями панелей СБ, разгружающего систему СГ от накопленного кинетического момента. Причем СБ являются магнитоуравновешенными при получении электрического тока в токовых контурах за счет того, что суммарный магнитный момент i-х токовых контуров положительного (Li+) и j-х токовых контуров отрицательного направлений (Lj-) равен нулю [2].
), развороте управляемых плоскостей СБ для создания пропеллерного момента, от взаимодействия солнечного ветра с поверхностями панелей СБ, разгружающего систему СГ от накопленного кинетического момента. Причем СБ являются магнитоуравновешенными при получении электрического тока в токовых контурах за счет того, что суммарный магнитный момент i-х токовых контуров положительного (Li+) и j-х токовых контуров отрицательного направлений (Lj-) равен нулю [2].
Преимущество этого способа, по сравнению с вышеуказанным, заключается в отсутствии расхода электроэнергии при формировании разгрузочного момента. Кроме того, нет необходимости иметь на борту КА специальный МИО, что повышает массу полезной нагрузки.
К основным недостаткам способа-прототипа можно отнести то, что при отклонении нормали к рабочей поверхности СБ от направления на Солнце (для создания пропеллерного момента) эффективность их, как генераторов энергии, снижается. Сама величина разгрузочного момента незначительна для проведения эффективной разгрузки системы СГ от накопленного кинетического момента.
Целью изобретения является повышение эффективности разгрузки СГ за счет увеличения значения разгрузочного момента. При этом необходимо отметить, что ориентация СБ на Солнце сохраняется.
Для этого в способе формирования разгрузочного момента для системы СГ КА с СБ, включающем формирование сигнала управления на токовые контуры солнечных батарей для создания магнитных моментов  , положительного знака и магнитных моментов отрицательного знака
, положительного знака и магнитных моментов отрицательного знака  в i-х и j-х токовых контурах соответственно, из условия равенства нулю суммарного магнитного момента, измерение вектора кинетического момента
в i-х и j-х токовых контурах соответственно, из условия равенства нулю суммарного магнитного момента, измерение вектора кинетического момента  в системе силовых гироскопов, после ориентации СБ на Солнце и в процессе поддержания ориентации СБ на Солнце, непрерывно измеряют вектор индукции магнитного поля Земли
в системе силовых гироскопов, после ориентации СБ на Солнце и в процессе поддержания ориентации СБ на Солнце, непрерывно измеряют вектор индукции магнитного поля Земли  и определяют единичный вектор
и определяют единичный вектор  от взаимодействия магнитного поля Земли и магнитных моментов токовых контуров положительного знака
от взаимодействия магнитного поля Земли и магнитных моментов токовых контуров положительного знака  =
=  ×
×  , определяют знак проекции
, определяют знак проекции  на направление вектора кинетического момента, при наличии положительного значения знака определяемой проекции при выполнении условия
на направление вектора кинетического момента, при наличии положительного значения знака определяемой проекции при выполнении условия ·
·  > 0 формируют сигнал управления на токовые контуры СБ для совпадения векторов
> 0 формируют сигнал управления на токовые контуры СБ для совпадения векторов  c
c  , а при отрицательном знаке проекции
, а при отрицательном знаке проекции  , определяемом из условия
, определяемом из условия  ·
·  < 0 , формируют сигнал управления на токовые контуры СБ для совпадения векторов
< 0 , формируют сигнал управления на токовые контуры СБ для совпадения векторов  c
c  , при выполнении условия
, при выполнении условия ·
·  = 0 сигнал на токовые контуры СБ не формируют.
= 0 сигнал на токовые контуры СБ не формируют.
Для сравнения эффективности разгрузки системы СГ предлагаемым способом и способом, указанным в прототипе, проведем расчетное сравнение величин разгрузочного момента  для обоих случаев.
для обоих случаев.
В описании способа-прототипа для расчета величины пропеллерного момента /Мп/, полученного от двух симметрично расположенных СБ, приведена следующая расчетная зависимость
Мп = 2Fп˙l˙sin α, (1) где Fп - сила падающего потока;
Fп = Р˙S, где Р ≈ 4,5˙10-6 Н/м2 - давление солнечной радиации в районе орбит ИСЗ;
S - площадь одной СБ;
l - расстояние от центра масс КА до геометрического центра управляемых плоскостей;
α - угол, характеризующий пропеллерность управляемых плоскостей.
Для расчета примем величины, близкие к значениям СБ орбитальной станции "Мир": S = 40 м2; l = 9 м.
Значение угла α будем выбирать исходя из того, что необходимо сохранять эффективность СБ как генератора электроэнергии в процессе разгрузки СГ. Согласно испытаниям СЭ, номинальный "ток Солнца" (Iн) и его текущее значение (I) находятся в зависимости
I = Iн ˙ соs α. (2)
При α = 20о, I ≈ 0,94Iн, что в принципе удовлетворяет условию сохранения эффективности СБ как генератора электроэнергии. Тогда
Мп = 2˙4,5˙10-6˙40˙9˙sinα 20 ≈ 1,1˙10-3 (н.м).
(3)
Расчет значения вектора М в предлагаемом способе разгрузки проведем для случая, когда  ┴
┴  , тогда
, тогда
M =  = I·2S·B (4)
= I·2S·B (4)
Причем I ≈ 300 А, S = 40 м2, В = 0,5˙10-4 Т, тогда
М = 300˙2˙40˙0,5˙10-4 ≈ 1,2 (н.м). (5)
Как видно из расчетных значений (3) и (5), в предлагаемом способе величина разгрузочного момента более чем на три порядка больше, чем в способе-прототипе. Следовательно, и процесс разгрузки системы СГ от накопленного кинетического момента будет идти намного эффективный (цели разгрузки будут достигаться на меньшем интервале полетного времени).
Необходимо также отметить, что хотя взято не максимально возможное значение Мп (по указанным выше причинам) для сравнения с М, в среднем разгрузочный момент М на один-два порядка больше Мп на участке разгрузки СГ. Причем, как уже подчеркивалось, ориентация СБ на Солнце в предлагаемом способе сохраняется.
В процессе непрерывной разгрузки системы СГ от накопленного кинетического момента  с помощью внешнего возмущающего момента
с помощью внешнего возмущающего момента  любой природы путем приложения
любой природы путем приложения  к корпусу КА и одновременной стабилизации углового движения КА с помощью системы СГ, необходимо, чтобы выполнялось условие
к корпусу КА и одновременной стабилизации углового движения КА с помощью системы СГ, необходимо, чтобы выполнялось условие ·
·  < 0. (6)
< 0. (6)
В этом случае модуль вектора Н постоянно уменьшается, тем самым и достигается цель разгрузки.
При использовании для разгрузки системы СГ момента получаемого от взаимодействия магнитного момента КА, заданного вектором  , с МПЗ, условие (6) можно привести к виду
, с МПЗ, условие (6) можно привести к виду (
( ) < 0, (7) где
) < 0, (7) где  - вектор индукции МПЗ.
- вектор индукции МПЗ.
Векторы  и
и  заданы в инерциальном пространстве, поэтому выполнение условия (7) достигается за счет управления вектором
заданы в инерциальном пространстве, поэтому выполнение условия (7) достигается за счет управления вектором  .
.
Вектор магнитного момента  можно представить токовым контуром площадью S, в котором протекает ток I
можно представить токовым контуром площадью S, в котором протекает ток I = I·S
= I·S , (8) где
, (8) где  - внешняя нормаль контура, взаимосвязана с обходом токового контура таким образом, что из конца вектора
- внешняя нормаль контура, взаимосвязана с обходом токового контура таким образом, что из конца вектора  обход должен быть виден происходящим против часовой стрелки. Существующие СБ - генераторы электрической энергии - представляют собой параллельное соединение цепочек последовательно подключенных друг к другу фотоэлементов, при этом количество фотоэлементов в цепочке определяет рабочее напряжение батареи, а количество цепочек обуславливает максимальный ток батареи.
обход должен быть виден происходящим против часовой стрелки. Существующие СБ - генераторы электрической энергии - представляют собой параллельное соединение цепочек последовательно подключенных друг к другу фотоэлементов, при этом количество фотоэлементов в цепочке определяет рабочее напряжение батареи, а количество цепочек обуславливает максимальный ток батареи.
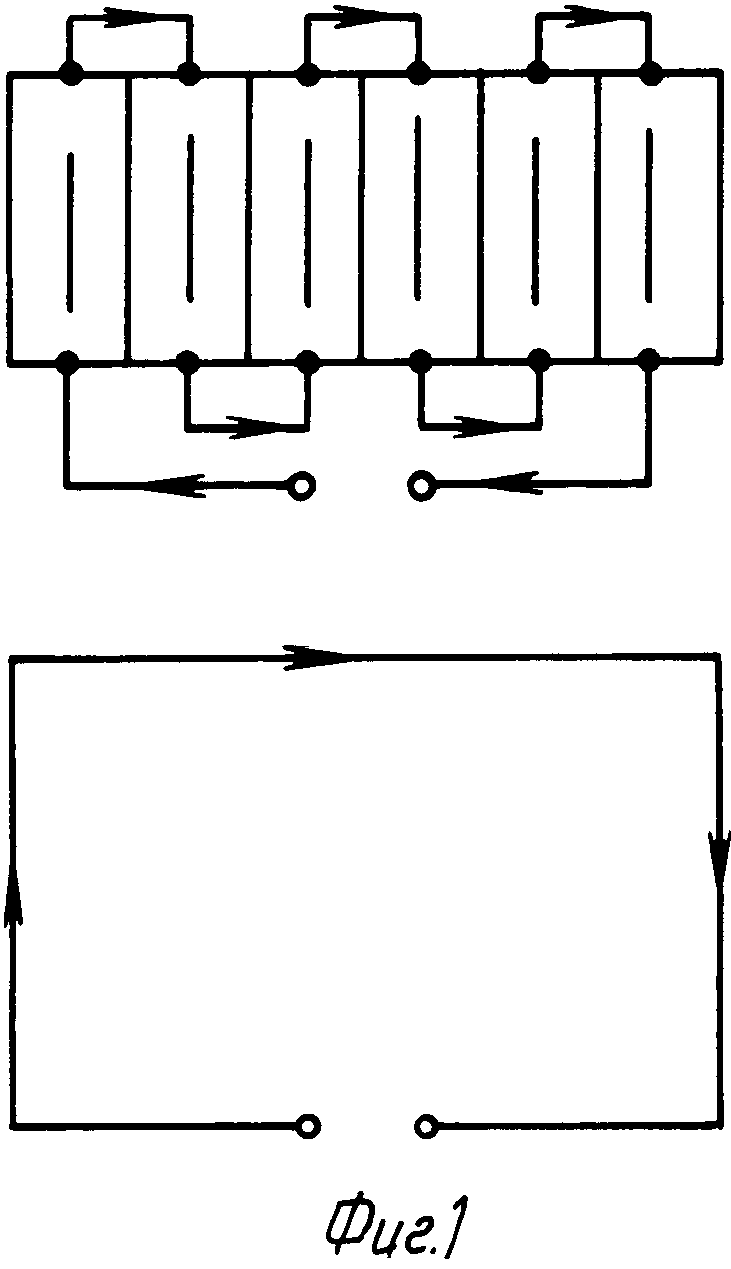
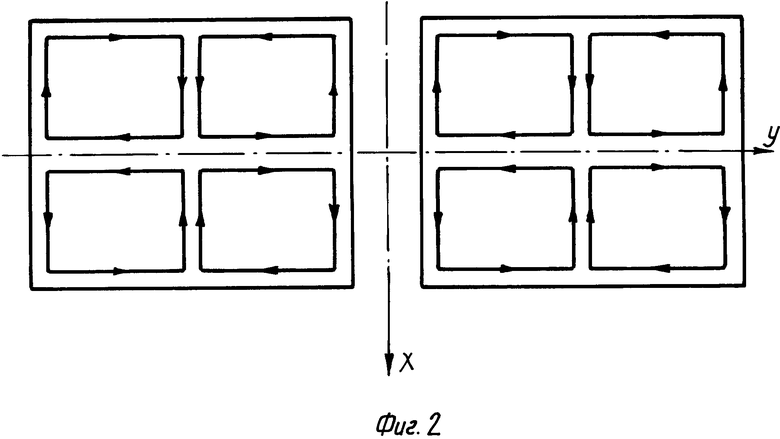
Если рассматривать в СБ соединения солнечных элементов (СЭ) в цепочки, то каждое из них образует токовый контур согласно схеме, указанной на фиг. 1, где стрелкой показано направление протекания тока в соединениях СЭ и в эквивалентном им токовом контуре. При размещении указанных соединений СЭ на панелях СБ магнитные моменты их токовых контуров в зависимости от направления протекания в них тока, разделяют по двум противоположным направлениям. На фиг. 2 показаны стрелками направления осей Х и Y связанного базиса, а также направления протекания тока в соединениях СЭ, расположенных на поверхности панели СБ. Для определенности примем магнитные моменты i-х токовых контуров, совпадающих с нормалью к рабочей поверхности СЭ панелей СБ ( ) положительными
) положительными = Ii·S
= Ii·S , (9) где i = 1, 2, ..., а магнитные моменты j-х токовых контуров, где они противоположны
, (9) где i = 1, 2, ..., а магнитные моменты j-х токовых контуров, где они противоположны  , - отрицательными
, - отрицательными = -Ij·S
= -Ij·S (10)
(10)
Для уменьшения влияния магнитных моментов от СБ на динамику КА в целом разработано специальное двойное зеркально-симметричное расположение цепочек СЭ, указанное на фиг. 2.
Суть его заключается в том, что СЭ комплектуется в контуры с разными значениями величин  . Далее эти контуры размещаются по указанной схеме расположения на конструкции СБ таким образом, чтобы взаимокомпенсировались их магнитные поля относительно связанных осей КА, т.е. суммарный магнитный момент от i-х и j-х токовых контуров равнялся нулю (примечание: фактически получить нулевой суммарный момент не удается, однако его остаточные значения имеют высокий порядок малости величин и ими пренебрегают).
. Далее эти контуры размещаются по указанной схеме расположения на конструкции СБ таким образом, чтобы взаимокомпенсировались их магнитные поля относительно связанных осей КА, т.е. суммарный магнитный момент от i-х и j-х токовых контуров равнялся нулю (примечание: фактически получить нулевой суммарный момент не удается, однако его остаточные значения имеют высокий порядок малости величин и ими пренебрегают).
Для получения условия разгрузки (7) системы СГ от накопленного кинетического момента предлагается определенным образом менять магнитное поле токовых контуров соединений СЭ за счет их разворота до получения необходимого значения вектора  в выражении (7).
в выражении (7).
Поставленная задача достигается следующим образом. После построение ориентации СБ на Солнце, измеряем значения векторов  и
и  в связанном базисе. Далее устанавливаем положение вектора
в связанном базисе. Далее устанавливаем положение вектора  в этом же базисе. Например, для поворотных СБ, вращающихся относительно оси ОZ, вектор
в этом же базисе. Например, для поворотных СБ, вращающихся относительно оси ОZ, вектор  определяется по значениям угла α поворота СБ:
определяется по значениям угла α поворота СБ: = (sin α, cos α, 0) для закрепленных СБ, установленных по той же оси,
= (sin α, cos α, 0) для закрепленных СБ, установленных по той же оси, = (0,1, 0) и т.д.
= (0,1, 0) и т.д.
Согласно принятым выражениям (9) и (10) =
=  /
/ , (11) т.е. он определяет положительные направления магнитных моментов i-х токовых контуров СБ.
, (11) т.е. он определяет положительные направления магнитных моментов i-х токовых контуров СБ.
Далее определяем единичный вектор  внешнего момента М, воздействующего на КА, получаемого от взаимодействия МПЗ с магнитным моментом СБ положительного направления по выражению
внешнего момента М, воздействующего на КА, получаемого от взаимодействия МПЗ с магнитным моментом СБ положительного направления по выражению =
=  ×
×  (12) и определяем знак его проекции на направление Н.
(12) и определяем знак его проекции на направление Н.
Если проекция имеет знак минус, т.е. выполняется условие ·
·  < 0 , (13) то i-е векторы магнитных моментов токовых контуров СБ могут при взаимодействии с МПЗ разгружать систему СГ (проекция внешнего момента направлена против вектора
< 0 , (13) то i-е векторы магнитных моментов токовых контуров СБ могут при взаимодействии с МПЗ разгружать систему СГ (проекция внешнего момента направлена против вектора  ). Чтобы происходила действительно разгрузка СГ с максимально возможной эффективностью, разворачиваем все j-е токовые контуры для совпадения
). Чтобы происходила действительно разгрузка СГ с максимально возможной эффективностью, разворачиваем все j-е токовые контуры для совпадения  c
c  . В случае, когда проекция момента
. В случае, когда проекция момента  имеет знак плюс, т.е. выполняет условие
имеет знак плюс, т.е. выполняет условие ·
·  > 0 (14) необходимо поменять знак вектора
> 0 (14) необходимо поменять знак вектора  путем разворота i-х токовых контуров до совпадения
путем разворота i-х токовых контуров до совпадения  c
c  .
.
В процессе поддержания солнечной ориентации по измеренным текущим значениям 
 t
t и
и 
 t
t , подставляя их в расчетные выражения (12), (13) или (14), контролируем изменение знака. В случае, если это происходит, разворачиваем все токовые контуры до смены суммарным вектором магнитного момента СБ своего направления на противоположное.
, подставляя их в расчетные выражения (12), (13) или (14), контролируем изменение знака. В случае, если это происходит, разворачиваем все токовые контуры до смены суммарным вектором магнитного момента СБ своего направления на противоположное.
Перечислим случаи, когда необходимо прекращать действие внешнего момента М (разворачивать токовые контуры к двойной зеркально-симметричной схеме, фиг. 2):
-  = 0, т.е. выполнены цели разгрузки системы СГ;
= 0, т.е. выполнены цели разгрузки системы СГ;
- = 0, т.е. КА находится в тени Земли и построить солнечную ориентацию невозможно;
= 0, т.е. КА находится в тени Земли и построить солнечную ориентацию невозможно;
-  ┴
┴  , т.е. внешний момент не приводит к разгрузке системы СГ.
, т.е. внешний момент не приводит к разгрузке системы СГ.
Выполнение равенства ·
·  = 0 (15) удовлетворяет всем указанным случаям.
= 0 (15) удовлетворяет всем указанным случаям.
Примечание: необходимо отметить, что в принципе можно регулировать величину разгрузочного момента за счет изменения суммарного магнитного момента СБ путем разворота не всех контуров на одно направление, а лишь их части. Однако при этом будет уменьшаться эффективность разгрузки, приводящая к затягиванию ее процесса.
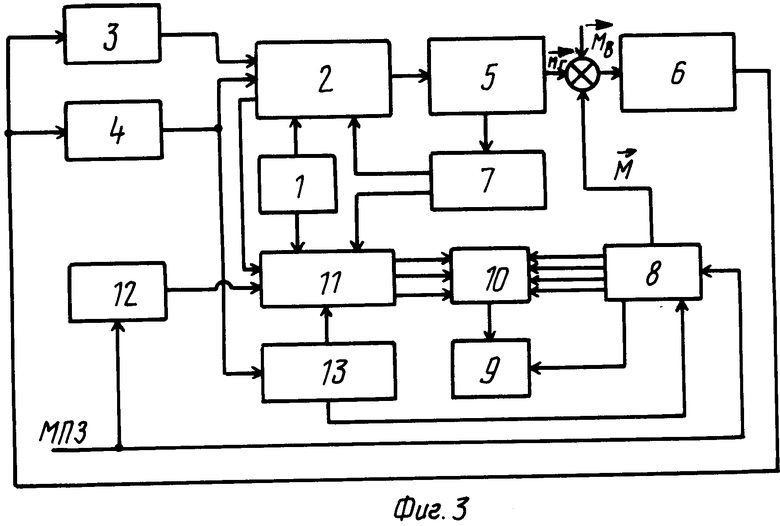
На фиг. 3 приведена структурная схема управления угловым движением КА с помощью СГ, снабженной контуром магнитной разгрузки от взаимодействия магнитного момента СБ с МПЗ.
Она имеет следующие обозначения: 1 - блок управления КА (БУКА); 2 - блок управления угловым движением КА (БУУД); 3 - блок датчиков угловых скоростей (БДУС); 4 - датчик измерения координат Солнца (ДИКС); 5 - блок силовых гироскопов (БСГ); 6 - корпус КА; 7 - блок измерения значений вектора кинетического момента (БИЗН); 8 - СБ; 9 - система электропитания потребителей (СЭП); 10 - блок разворота токовых контуров (БРТК); 11 - блок формирования разгрузочного момента (БФРМ); 12 - магнитометр (МГ); 13 - система ориентации СБ (СОСБ).
Кроме того, на фиг. 3 условно показано суммирование на корпусе КА следующих моментов: управляющего момента от БСГ 5 (Мг); главного вектора момента всех внешних возмущающих сил (аэродинамических, магнитных, не связанных с взаимодействием МПЗ с СБ и т.д.)  и разгрузочного (внешнего) момента
и разгрузочного (внешнего) момента  от СБ 8. Условно показано также измерение МПЗ с помощью МГ 12 и взаимодействие МПЗ с магнитными моментами СБ 8.
от СБ 8. Условно показано также измерение МПЗ с помощью МГ 12 и взаимодействие МПЗ с магнитными моментами СБ 8.
БУКА 1 своим первым выходом соединен с первым входом БУУД 2, а вторым выходом - с первым входом БФРМ 11. Второй и третий входы БУУД 2 соединены соответственно с выходами БДУС 3 и ДИКС 4. Выход ДИКС 4 соединен также с входом СОСБ 13. А первый выход БУУД 2 соединен с входом БСГ 5. БСГ 5 соединен с БИЗН 7, который в свою очередь своим первым выходом соединен с четвертым входом БУУД 2 и своим вторым выходом - с вторым входом БФРМ 11. МГ 12 своим выходом соединен с третьим входом БФРМ 11. А с четвертым входом БФРМ 11 соединен выход СОСБ 13. Второй выход БУУД 2 соединен с пятым входом БФРМ 11. БФРМ 11 соединен своими первым-третьим выходами с первым-третьим входами БРТК 10. СБ 8 своим первым выходом соединена с первым входом СЭП 9 и вторым - пятым выходами - с четвертым-седьмым входами БРТК 10. А выход БРТК 10 соединен со вторым входом СЭП 9. Кроме того, на фиг. 3 дополнительно показана механическая связь СОСБ 13 с СБ 8, а также установка БДУС 3, ДИКС 4 и МГ 12 на корпусе КА 6 (тем самым определены связанные с указанными приборами базисы по отношению к связанному базису КА).
Работает система следующим образом.
С БУКА 1 выдается команда в БУУД 2 на построение солнечной ориентации (СО). После чего БУУД 2 начинает формировать расчетное значение необходимого управляю- щего момента по выражению: = k·J1(
= k·J1( -
- )-
)- ×
×  (16) где k - коэффициент усиления по скорости в законе управления системой СГ;
(16) где k - коэффициент усиления по скорости в законе управления системой СГ; - вектор абсолютной угловой скорости КА (измеренные компоненты вектора в БУУД 2 поступают с БДУС 3);
- вектор абсолютной угловой скорости КА (измеренные компоненты вектора в БУУД 2 поступают с БДУС 3); - угловая скорость коррекции, формируется на основе информации с ДИКС 4, т. е.
- угловая скорость коррекции, формируется на основе информации с ДИКС 4, т. е.  = f(αs, βs), где αs, βs - углы, определяющие положение Солнца в связанном базисе датчика ДИКС 4;
= f(αs, βs), где αs, βs - углы, определяющие положение Солнца в связанном базисе датчика ДИКС 4;
I1 - тензор инерции КА; = I
= I +
+ - суммарный вектор кинетического момента КА, где
- суммарный вектор кинетического момента КА, где  - измеренные значения вектора кинетического момента в системе СГ, поступающие в БУУД 2 с БИЗН 7.
- измеренные значения вектора кинетического момента в системе СГ, поступающие в БУУД 2 с БИЗН 7.
Требуемый управляющий момент отрабатывается в динамическом контуре БУУД 2 КА в соответствии с законами управления скоростями прецессии системы двухстепенных СГ, т.е. реализуется равенство = H =
= H =  (17)
(17)
Обмен кодовой информацией между БУУД 2 и ВСГ 5 подробно представлен в техническом описании вышеуказанного прибора.
Угловая скорость корпуса КА 6 в результате приложения (суммирования) двух моментов  и
и  будет изменяться в соответствии с уравнением Эйлера:
будет изменяться в соответствии с уравнением Эйлера: = I
= I -M
-M ×
×  , (18) а в кинетическом контуре БУУД 2 будет происходить изменения кватерниона Λ(Λ0,Λ1, Λ2,Λ3), рассогласования между солнечным опорным базисом и связанным базисом. Построение СО заканчивается при совмещении двух указанных базисов. При этом построение СО может осуществляться для трехосной выставки связанного базиса в инерциальном пространстве или приведением единичного вектора
, (18) а в кинетическом контуре БУУД 2 будет происходить изменения кватерниона Λ(Λ0,Λ1, Λ2,Λ3), рассогласования между солнечным опорным базисом и связанным базисом. Построение СО заканчивается при совмещении двух указанных базисов. При этом построение СО может осуществляться для трехосной выставки связанного базиса в инерциальном пространстве или приведением единичного вектора  направлен на Солнце в плоскость ХОY связанного базиса и дальнейшим поворотом СБ относительно оси ОZ до совпадения
направлен на Солнце в плоскость ХОY связанного базиса и дальнейшим поворотом СБ относительно оси ОZ до совпадения  c
c  . После построения СО с БУКА 1 в БФРМ 11 выдается управляющая команда-признак на разгрузку системы СГ.
. После построения СО с БУКА 1 в БФРМ 11 выдается управляющая команда-признак на разгрузку системы СГ.
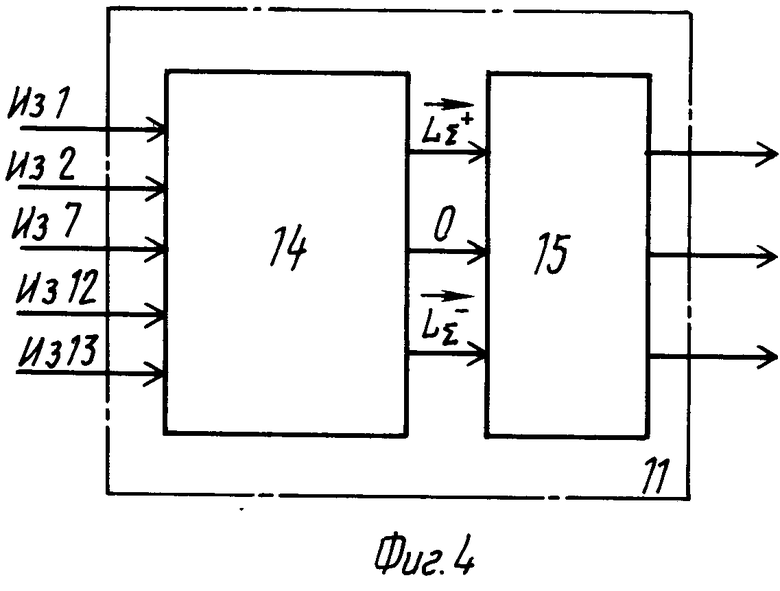
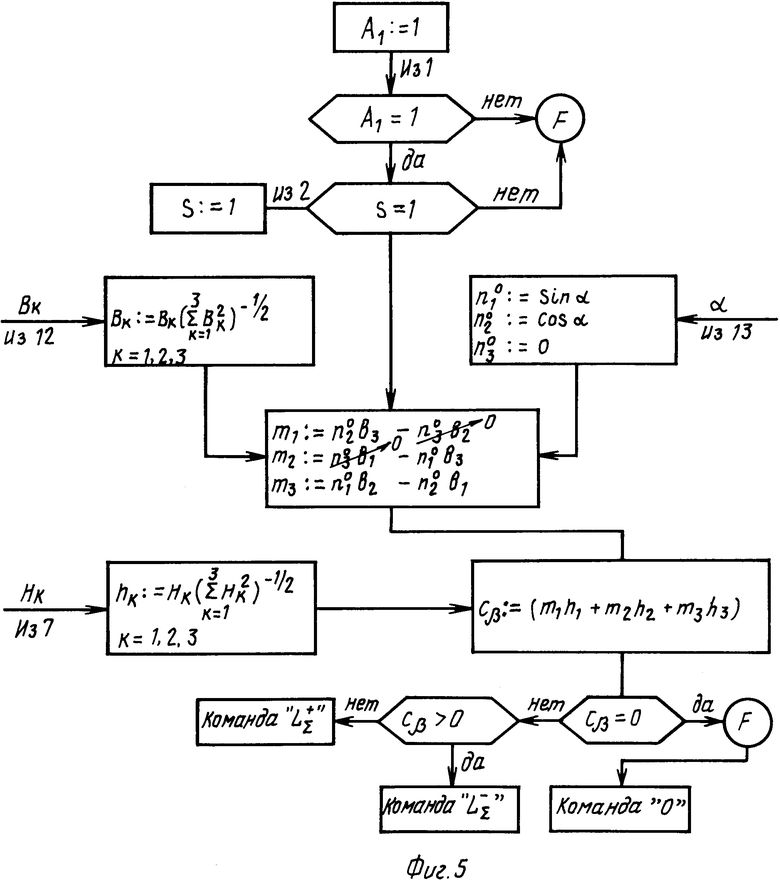
БФРМ 11 состоит непосредственно из спецвычислителя 14 (фиг. 4) и блока согласующих устройств (БСУ) 15. БСУ 15 содержит преобразователи кода в релейные сигналы. Входы спецвычислителя 14 соответствуют входам БФРМ 11, а три его выхода соединены с тремя входами БСУ 15. Выходы БСУ 15 соответствуют выходам БФРМ 11. Алгоритм работы спецвычислителя 14 представлен на фиг. 5, где вновь введены обозначения:
А1 - признак требования режима разгрузки (РР) А1 = 1 "требование РР", -А1 = 0 - "нет РР";
S - признак наличия СО, S = 1 - "наличие СО", S = 0 - "отсутствие СО";
Вк и Нк - компоненты векторов  и
и 
Выставка признаков А1 и S производится соответственно из БУКА 1 и БУУД 2 (автоматически после построения СО). Для формирования разгрузочного момента используются измеренные значения векторов  (получаемые из МГ 12),
(получаемые из МГ 12),  (получаемые из БИЗН 7) и измеренные значения угла поворота (α ) СБ, получаемые с соответствующего датчика системы СОСБ 13.
(получаемые из БИЗН 7) и измеренные значения угла поворота (α ) СБ, получаемые с соответствующего датчика системы СОСБ 13.
На выходе спецвычислителя 14 формируются три управляющие команды: команда LΣ+ соответствует развороту токовых контуров до совпадения их магнитных моментов с  ;
;
команда LΣ- - соответствует развороту в обратном направлении и команда "0" - исходному (магнитонейтральному) положению токовых контуров. Указанные команды через БСУ 15 поступают на первый-третий входы БРТК 10, который реализует их.
Для рассмотрения логики работы БРТК 10 необходимо дополнительно рассмотреть конструктивные особенности СБ.
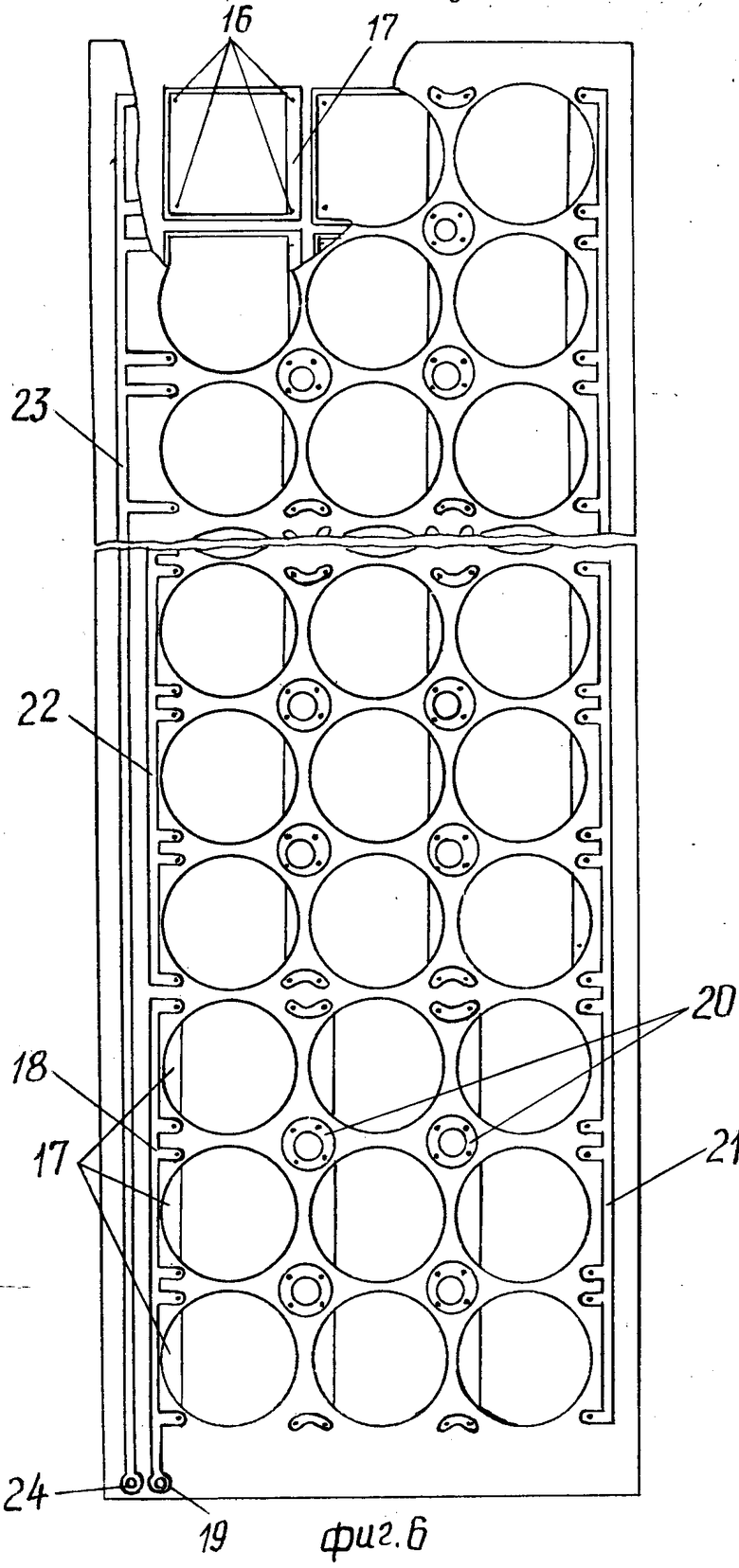
Известна конструкция СБ. Указанная СБ имеет в составе панелей cборки СЭ, которые представляют собой законченные электрические секции. Секция имеет 54-е кремниевых монокристаллических СЭ с размерами 2х2 см и толщиной 125 мкм и состоит из шести блоков размерами 3х3 СЭ. Блоки представляют собой последовательное соединение трех групп, каждая из которых состоит из трех элементов, соединенных параллельно. Секция представлена на фиг. 6 со стороны рабочей поверхности. Каждый СЭ крепится к кэптоновому листу в четырех точках 16 методом печатного монтажа, причем лист перфорирован круговыми отверстиями, открывающими рабочую поверхность СЭ.
Токопроводящие шины расположены вдоль длинных сторон листа кэптона следующим образом: СЭ первой группы первого блока припаиваются контактами n - проводимости 17 к шине 18, подключенной к первому токоотводу 1. Контакты р - проводимости этой группы соединяются с n-контактами второй группы кольцевыми проводниками 20. Таким же образом соединены вторая и третья группы, а p-контакты третьей группы припаиваются к шине 20, последовательно соединяющей первый блок со вторым; p-контакты замыкающей группы второго блока в свою очередь через шину 22 последовательно соединены со следующим блоком. Наконец, р-контакты последнего блока подключаются к шине 23, замыкающей токовый контур на второй токоотвод 24. Токоотводы 19 и 24 параллельно подключаются к СЭП. Как видно из фиг. 6, секция представляет собой замкнутый токовый контур, который при работе создает собственное магнитное поле, характеризующееся магнитным моментом этого контура. Направление тока в токоотводах 19 и 24 при замыкании цепи зависит от установленной проводимости (электронной или дырочной) полупроводников СЭ. Условимся, что при замыкании цепи ток I протекает в направлении от токоотвода 19 к токоотводу 24. В зависимости от того, как сборка СЭ будет установлена на конструкции СБ по отношению к выбранной нормали  , магнитный момент будет иметь положительное или отрицательное значение.
, магнитный момент будет иметь положительное или отрицательное значение.
Рассмотрим, как можно развернуть токовый контур, смонтированный на конструкции, чтобы его магнитный момент поменял знак на противоположный. Сделать это можно, например, механическим путем, развернув указанную сборку СЭ относительно одной из осей симметрии, образующих ее плоскость, на 180о. Однако в этом случае необходимо, чтобы СЭ имели двухстороннюю рабочую поверхность. Кроме того, необходимо установить специальные приводы для разворота элементов конструкции, на которых установлены сборки СЭ. Все это значительно усложняет конструкцию СБ.
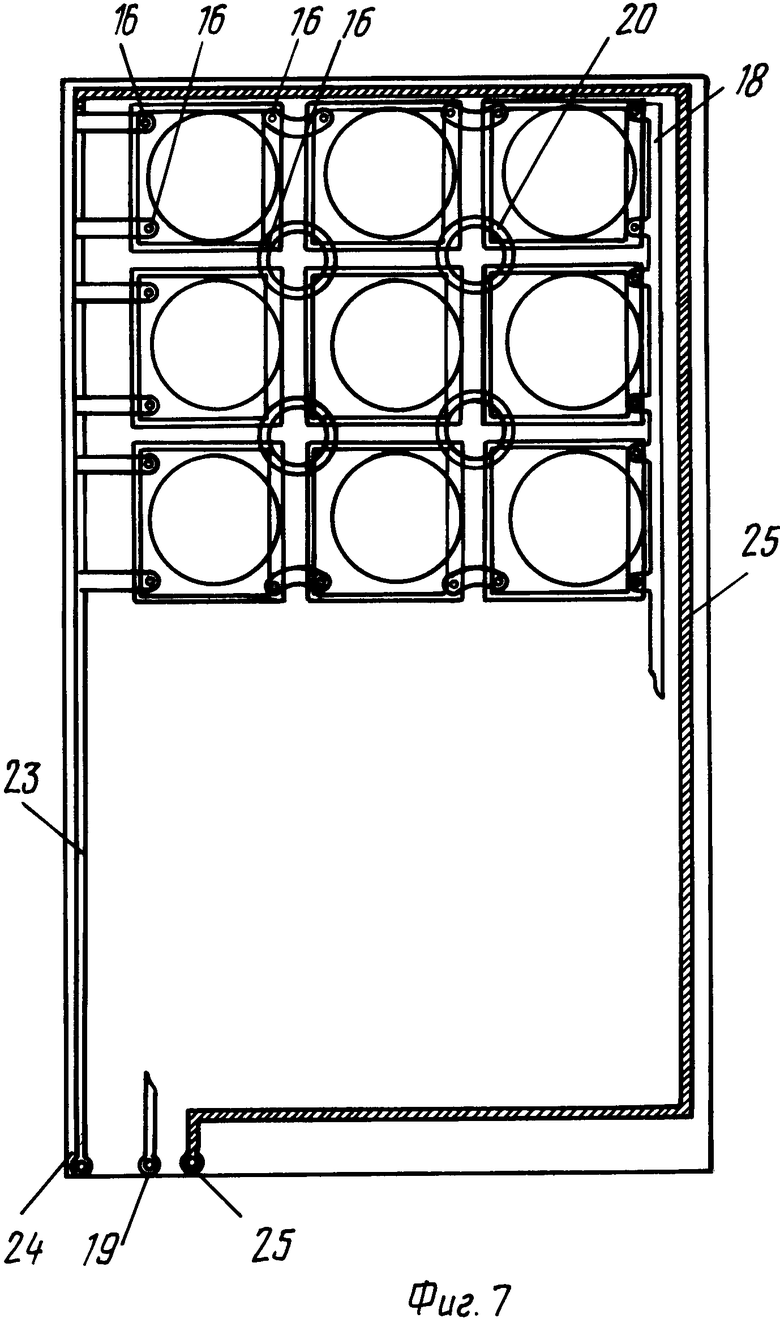
Более простым является электрический принцип разворота токовых контуров. Для его осуществления указанную на фиг. 6 сборку СЭ необходимо дополнить обводной токовой шиной 25 (фиг. 7). Остальные обозначения на фиг. 7 соответствуют обозначениям, введенным на фиг. 6. Тогда в зависимости от того, к каким шинам будет подключаться нагрузка, направление тока в контуре будет меняться, а следовательно, будет меняться и знак магнитного момента. Для принятого направления протекания тока в контуре  будет при подключении нагрузки к токоотводам 19 и 24, а
будет при подключении нагрузки к токоотводам 19 и 24, а  - при подключении нагрузки к токоотводам 19 и 25.
- при подключении нагрузки к токоотводам 19 и 25.
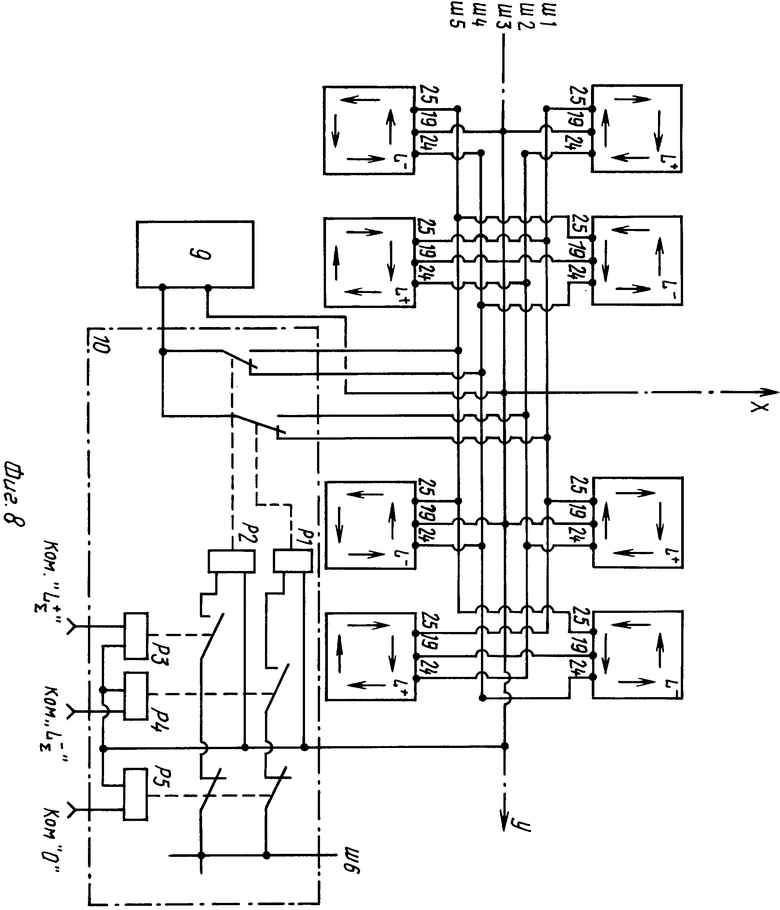
На фиг. 8 представлена принципиальная электрическая схема разворота токовых контуров, где введены обозначения: Р1-Р5 - электромагнитные реле с указанием обмотки, контактов и линий механической связи; Ш1-Ш6 - электрические шины.
Остальные обозначения соответствуют ранее введенным на фиг. 2-7.
К Ш1, Ш5 по принципу двойной зеркально-симметричной схемы подключены токоотводы 25 сборок СЭ, а к Ш2, Ш4 по той же схеме - токоотводы 24. К Ш3 подключены токоотводы 19. Ш6 является общей шиной запитки управляющих реле Р1 и Р2. При обесточивании Ш6 схема находится в исходном магнитоуравновешенном состоянии (фиг. 8). Ш1 и Ш2 через двухпозиционную контактную группу реле Р1 соединены с вторым входом СЭП 9, а Ш4 и Ш5 через двухпозиционную контактную группу реле Р2 соединены также с вторым входом СЭП 9. Ш3 соединена с первым входом СЭП 9, а также служит для запитки обмоток (соединена с первыми входами обмоток Р1-Р5). Ш6 через нормально замкнутые контакты реле Р5 и нормально разомкнутые контакты реле Р4 и Р3 соединена соответственно со вторыми входами обмоток реле Р1 и Р2. Вторые входы обмоток Р3-Р5 соединены с командными входами БРТК 10, причем Р3 - с первым командным входом (ком "LΣ+"), Р4 - с третьим командным входом (ком. "LΣ-") и Р5 - со вторым командным входом (ком. "0").
Реле Р1-Р5 совместно со своими обмотками и контактными группами и составляют БРТК 10.
Реле Р1 и Р2 осуществляют непосредственный коммутационный разворот токовых контуров, а Р3-Р5 осуществляют управление обмотками реле Р1 и Р2 по командам с БФРМ 11 (фиг. 3, 4, 5). На фиг. 8 контакты всех реле показаны в нормальном (в обеспеченном для реле) положении, при этом соединение токовых контуров соответствует магнитоуравновешенному состоянию. Для получения суммарного положительного магнитного момента необходимо подать с БФРМ 11 на Р3 команду LΣ+, а для получения суммарного отрицательного магнитного момента необходимо подать с БФРМ на Р4 команду LΣ-. По данным командам запитываются соответственно обмотки Р2 или Р1, а их контакты подключают в электрическую цепь токоотводы 19 и 25 либо токоотводы 19 и 24 (фиг. 6, 7, 8). По команде "0" происходит размыкание контактной группы реле Р5, тем самым обесточивание Р1 и Р2, по которому схема происходит в исходное магнитоуравновешенное состояние.
Способ формирования разгрузочного момента для системы силовых гироскопов (СГ) космического аппарата (КА) с солнечными батареями относится к управлению ориентацией КА с инерционными исполнительными органами. Применение в системах ориентации КА инерционных исполнительных органов - силовых гироскопов - позволяет управлять им без расходования массы борта. Однако процесс управления требует постоянной или периодической разгрузки системы СГ от накопленного кинетического момента. Один из наиболее эффективных способов разгрузки основан на приложении к корпусу КА внешнего момента магнитных сил, получаемого от взаимодействия магнитного поля небесного тела со свойственным самому КА магнитным моментом. В предлагаемом способе магнитный момент КА формируется с помощью солнечных батарей. 8 ил.
СПОСОБ ФОРМИРОВАНИЯ РАЗГРУЗОЧНОГО МОМЕНТА ДЛЯ СИСТЕМЫ СИЛОВЫХ ГИРОСКОПОВ КОСМИЧЕСКОГО АППАРАТА С СОЛНЕЧНЫМИ БАТАРЕЯМИ, включающий формирование сигнала управления на токовые контуры солнечных батарей (СБ) для создания магнитных моментов  положительного знака и магнитных моментов
положительного знака и магнитных моментов  отрицательного знака в i- и j-х токовых контурах СБ соответственно, из условия равенства нулю суммарного магнитного момента, измерение вектора кинетического момента
отрицательного знака в i- и j-х токовых контурах СБ соответственно, из условия равенства нулю суммарного магнитного момента, измерение вектора кинетического момента  в системе силовых гироскопов, отличающийся тем, что после ориентации СБ на Солнце непрерывно измеряют вектор индукции магнитного поля Земли
в системе силовых гироскопов, отличающийся тем, что после ориентации СБ на Солнце непрерывно измеряют вектор индукции магнитного поля Земли  определяют единичный вектор
определяют единичный вектор  от взаимодействия магнитного поля Земли и магнитных моментов токовых контуров положительного знака по зависимости
от взаимодействия магнитного поля Земли и магнитных моментов токовых контуров положительного знака по зависимости
определяют знак проекции  на направление вектора кинетического момента
на направление вектора кинетического момента  при наличии положительного значения знака определяемой проекции при выполнении условия
при наличии положительного значения знака определяемой проекции при выполнении условия
формируют сигнал управления на токовые контуры СБ для совпадения векторов  при отрицательном знаке проекции формируют сигнал управления на токовые контуры СБ для совпадения векторов
при отрицательном знаке проекции формируют сигнал управления на токовые контуры СБ для совпадения векторов  в случае выполнения условия
в случае выполнения условия
сигнал управления на токовые контуры СБ не формируют.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Левантовский В.И | |||
| Механика космического полета в элементарном изложении | |||
| М.:Наука, 1974. | |||
