Изобретение относится к системе измерения и обработки информации и может быть использовано для определения линейного и углового отклонения упругого протяженного тела, одним концом закрепленного относительно заданной системы координат, в частности для измерения положения трубного става, погружаемого в море с добывающего судна.
Для эффективного использования става необходимо в течение всего времени работы достаточно точно определить координаты конца става и углы наклона его относительно горизонта. Из известных технических решений наиболее подходящим для этой цели является инерциальная навигационная система (ИНС), вырабатывающая углы наклона относительно плоскости горизонта и координаты точки, в которой она размещена, выполненная с возможностью коррекции от средств обсервации. Для измерения положения трубного става с помощью прототипа необходимо разместить ИНС на конце става.
Недостатком прототипа при этом является как низкая точность определения исходного места конца става на момент погружения, так и неограниченное нарастание со временем погрешности определения места конца става (как погрешность долготы некорректируемой ИНС) в процессе добычи (движения). Для повышения точности измерения координат в этом случае нельзя применять известные методы коррекции ИНС от средств обсервации (радионавигационные системы, астрокорректоры, дальномеры и т.п.), так как для их работы должно быть задано положение ИНС относительно средств обсервации, что невозможно при размещении ИНС в подводном положении и на перемещающемся относительно судна конце става.
Целью изобретения является повышение точности измерения координат конца става путем оценки указанных погрешностей.
Цель достигается тем, что инерционная навигационная система установлена в точке крепления става с объектом, и тем, что на ставе равномерно размещены n двухкоординатных блоков измерения линейных ускорений и приращений углов наклона, например, включающих два маятниковых акселерометра и два кольцевых лазерных гироскопа со взаимно ортогональными входными осями, перпендикулярными оси става, введен блок выработки координат конца става, а также два канала определения линейного отклонения и угла наклона конца става, содержащие каждый n-1 группу следующих блоков, блок определения приращений линейного отклонения и углов наклона, блок суммирования ускорений, выходами связанный с входами по ускорению соответствующих блоков определения приращений, прямыми входами - с выходами по ускорению последующих двухкоординатных измерительных блоков и инверсными входами - с выходами по ускорению соответствующих двухкоординатных измерительных блоков, блоки суммирования приращений угла, выходами связанные с входами по приращению угла соответствующих блоков определения приращений, прямыми входами - с выходами по приращению угла наклона последующих двухкоординатных измерительных блоков и инверсными входами - с выходами по приращению угла наклона соответствующих двухкоординатных измерительных блоков, последовательно соединенные блоки суммирования приращений угла наклона, последовательно соединенные блоки суммирования линейного отклонения.
Кроме того, в заявляемом измерителе блок выработки приращений линейного отклонения угла наклона представляет собой замкнутый контур из последовательно соединенных блока определения ускорения оси става, первого сумматора, первого интегратора, второго сумматора, второго интегратора, масштабирующего блока, блока определения среднего приращения угла наклона става, блока суммирования приращений среднего угла наклона, блока учета упругости става, блока определения невязки угла и блока демпфирования собственных колебаний.
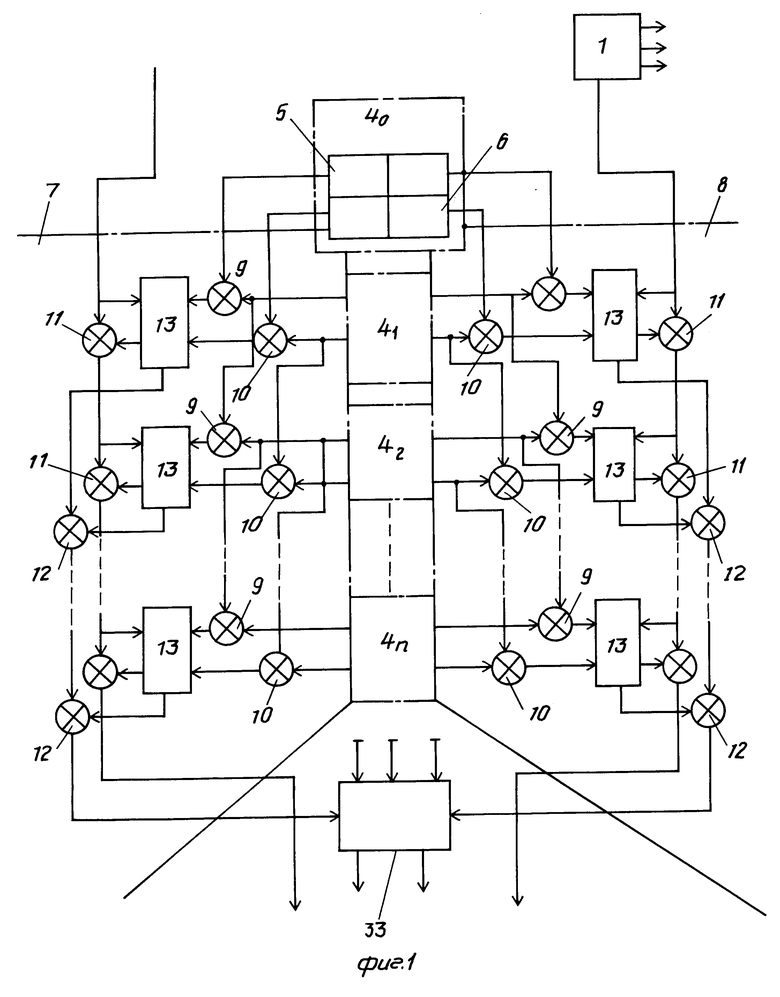
На фиг.1 приведена структурная схема предложенного измерителя; на фиг.2 показано размещение двухкоординатных измерительных блоков на ставе (в плоскости килевой качки); фиг.3 иллюстрирует расположение использованных систем координат; на фиг.4 представлена схема блока определения приращений линейного отклонения и угла наклона.
В тексте приняты следующие обозначения:
ДИБ - двухкоординатный измерительный блок;
Аoх, Аоу - маятниковые акселерометры, устанавливаемые по соответствующим осям;
ЛГох, ЛГоу - кольцевые лазерные гироскопы, устанавливаемые по соответствующим осям;
КВОУх, КВОУу - каналы определения линейных отклонений и углов наклона в соответствующих осях;
ВПу - блоки определения приращений линейных отклонений и углов наклона, установленных по соответствующим осям;
БВК - блок определения координат места конца става, является выходом измерителя положения става;
аjx, ajy - значения составляющих линейного ускорения,
j =  ;
;
Δθj, ΔΨj - значения приращений углов наклона (бортовая и килевая составляющие качек),
j =  ;
;
δθk*, δϕk* - приращение углов качки на участках между соседними блоками ДИБ,
k = 
Δ Xk, ΔYk - значения приращения линейных отклонений оси става вдоль горизонтальных осей,
k = 
θm, Ψm - полные значения бортовой и килевой качек на каждом интервале установки ДИБ,
m = 
Xk, Yk - полные значения смещений точки θк (место установки ДИБ),
K = 
K - курс судна;
ϕo,λo - координаты судна;
ϕN,λN - координаты конца става;
θk*,Ψk*- средние значения угла наклона между Ψk-1 и Ψk; θk-1 и θk.
Измеритель положения трубного става содержит (фиг.1, 2) корректируемую инерциальную систему (ИНС) 1, например устройство со схемой коррекции от средств обсервации. Схема коррекции ИНС для простоты на чертежах не показана, поскольку ее выполнение известно и не влияет на достижение цели изобретения. Корректируемая ИНС 1 предназначена для выработки курса К, углов килевой Ψo и бортовой θo качки судна 2, а также координат места ее установки ϕo, λo с погрешностью, не превышающей заданную постоянную величину при длительной работе ИНС. Система 1 установлена в точке 0 крепления к судну 2 упругого трубного става 3, вдоль оси которого равномерно, на расстоянии l друг от друга, размещены двухкоординатные блоки 4 измерения линейных ускорений и приращений углов наклона, предназначенных для измерения составляющих линейного ускорения акх, аку и приращений углов наклона (углов бортовой и килевой качек) вокруг осей X и Y (фиг. 3) ΔΨк и Δθк в плоскости, перпендикулярной оси става 3. Величина выбирается с учетом упругости става 3 таким образом, чтобы при максимально допустимых изгибах става 3 изменения угла наклона его оси относительно вертикали на участке между соседними блоками 4 не превышало 0,5-1,0о, что позволяет считать углы ΔΨk и Δθk малыми.
Тогда необходимое количество блоков 4 определяется неравенством
N ≥  , (1) где L - заданная длина става, причем 1≅k≅N.
, (1) где L - заданная длина става, причем 1≅k≅N.
Блоки 4 могут включать, например, по два маятниковых акселерометра 5 и два кольцевых лазерных гироскопа 6 с устройствами съема и преобразования выходного сигнала (на фиг.1 не показаны), оси чувствительности которых лежат в плоскостях бортовой и килевой качки и перпендикулярны оcи става. Выходы чувствительных элементов 5 и 6 блоков 4 подключены в соответствии с фиг. 1 к каналам определения линейного отклонения и угла наклона конца става 7 и 8, содержащим каждый блок 9 суммирования ускорений, предназначенные для выработки измеренных акселерометрами 5 линейных ускорений на участках между соседними блоками 4, блоки 10 суммирования приращений угла, предназначенные для выработки измеренных гироскопами 6 приращений угла наклона оси става на участках между соседними блоками 4 за заданное время Δt, блоки 11 суммирования приращений угла наклона, предназначенные для выработки текущих полных значений углов бортовой θk и килевой Ψkкачки (K=1, N) оси става в точках установки блоков 4, блоки 12 суммирования линейного отклонения, предназначенные для выработки текущих полных значений смещения Хk, Yk точки Оk относительно точки О вдоль осей Х, Y, а также блоки 13 определения приращений линейного отклонения и угла наклона, предназначенные для выработки приращений линейного отклонения оси става Δ Xk, ΔYk вдоль горизонтальных осей Х, Y и приращений углов качки δθk, δϕk на участках между соседними блоками 4.
Блоки 13 (фиг.4) включают каждый первый интегратор 14 ускорения, второй интегратор 15 ускорения, масштабирующий блок 16 с коэффициентом передачи 1/l, блок 17 определения приращения среднего угла наклона оси става по формуле
αк*=arcsinUk, (2) где Uк=  - выходной сигнал блока 16; (3) Δlk есть ΔХк илиΔ Yk в зависимости от того, в каком из каналов 7 или 8 находится блок 13, а αк* есть соответственно θк* или Ψк* (см. фиг.2). Выход блока 17 подключен к прямому входу блока 18 суммирования приращения среднего угла наклона, инверсным входом подключенного к выходу предыдущего в канале 7 или 8 блока 11, вырабатывающего соответственно θк-1 или Ψк-1 . Выход сумматора 18 подключен к блоку 19 учета упругости става с коэффициентом передачи 1/ ζк, который вычисляется заранее в процессе калибровки схемы и зависит от упругости данного участка става. Выход блока 19 связан с инверсным входом определения невязки угла 20, прямым входом соединенного с выходом соответствующего блока 10 суммирования приращений угла, выходом - с входом блока 21 демпфирования собственных колебаний, предназначенного для гашения собственных колебаний (переходных процессов) в блоке 13. Схема 21 включает масштабирующие блоки 22 и 23 с постоянными коэффициентами передачи k1 и k2 и предварительный фильтр 24, соединенные согласно фиг.4. Фильтр 24 предназначен для предварительной обработки сигнала невязки (подавления помехи). При наличии в сигнале невязки высокочастотной помехи он может представлять собой апериодическое звено, как показано на фиг.4, и включает интегратор 25, масштабирующее звено 26 с коэффициентом передачи 1/ Δt1, где Δ t1 выбирается в 3-5 раз больше периода помехи, а также сумматор 27. Выходы схемы 21 демпфирования через сумматоры 28 и 29 связаны с входом интегратора 15 и первым входом блока 30 определения ускорения оси става, предназначенного для вычисления ускорения из-за наклона оси става по формуле
- выходной сигнал блока 16; (3) Δlk есть ΔХк илиΔ Yk в зависимости от того, в каком из каналов 7 или 8 находится блок 13, а αк* есть соответственно θк* или Ψк* (см. фиг.2). Выход блока 17 подключен к прямому входу блока 18 суммирования приращения среднего угла наклона, инверсным входом подключенного к выходу предыдущего в канале 7 или 8 блока 11, вырабатывающего соответственно θк-1 или Ψк-1 . Выход сумматора 18 подключен к блоку 19 учета упругости става с коэффициентом передачи 1/ ζк, который вычисляется заранее в процессе калибровки схемы и зависит от упругости данного участка става. Выход блока 19 связан с инверсным входом определения невязки угла 20, прямым входом соединенного с выходом соответствующего блока 10 суммирования приращений угла, выходом - с входом блока 21 демпфирования собственных колебаний, предназначенного для гашения собственных колебаний (переходных процессов) в блоке 13. Схема 21 включает масштабирующие блоки 22 и 23 с постоянными коэффициентами передачи k1 и k2 и предварительный фильтр 24, соединенные согласно фиг.4. Фильтр 24 предназначен для предварительной обработки сигнала невязки (подавления помехи). При наличии в сигнале невязки высокочастотной помехи он может представлять собой апериодическое звено, как показано на фиг.4, и включает интегратор 25, масштабирующее звено 26 с коэффициентом передачи 1/ Δt1, где Δ t1 выбирается в 3-5 раз больше периода помехи, а также сумматор 27. Выходы схемы 21 демпфирования через сумматоры 28 и 29 связаны с входом интегратора 15 и первым входом блока 30 определения ускорения оси става, предназначенного для вычисления ускорения из-за наклона оси става по формуле
Δ gk= g δαk, (4) где δαk - приборное значение приращения угла наклона, поступающее с выхода сумматора 29 и являющееся выходным сигналом блока 13;
g - величина ускорения свободного падения.
Выход блока 30 соединен с входом интегратора 14 через сумматор 31, вторым входом связанный с выходом соответствующего блока 9 через блок 32 преобразования ускорения, в котором вычисляется горизонтальная составляющая приращения ускорения Δ ак путем умножения на секанс угла αк-1, поступающего на второй вход блока 32 с выхода предыдущего блока 11.
Выходы последних блоков 12 в каналах 7, 8 подключены к входам блока 33 определения координат конца става, другими выходами связанного с выходами ИНС 1 по курсу и координатам места. Координаты конца става вырабатываются в блоке 33 по формуле
ϕN = ϕo+  YN cos K - XNsin K
YN cos K - XNsin K ;
;
λN = λo+  (XN cos K + YN sin K);
(XN cos K + YN sin K);
RE =  ; (5)
; (5)
RN= 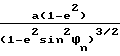 , где ϕo,λo, к - поступают от ИНС;
, где ϕo,λo, к - поступают от ИНС;
ХN, YN - поступают из каналов 7, 8;
RN, RE - радиусы кривизны земного сфероида, имеющего большую полуось а и эксцентриситет е.
Работа устройства заключается в следующем.
Корректируемая ИНС 1 с использованием данных средств обсерваций непрерывно измеряет курс k и углы качки θo,Ψo судна 2, а также координаты ϕo, λo точки 0, в которой закреплено начало трубного става 3. В результате действия подводных течений и небольших перемещений судна 2 став 3 искривляется в плоскостях бортовой и килевой качки. Работу предлагаемого измерителя рассмотрим на примере канала 8 (в плоскости килевой качки, см. фиг.2), канал 7 действует аналогично. Блоки 4 вместе со ставом 3 испытывают линейные и угловые перемещения. Входящие в них чувствительные элементы 5 и 6 измеряют следующие величины: линейное ускорение, равное разности абсолютного ускорения точки установки акселерометра 5 и гравитационного ускорения:
a cosΨk-1- g sin Ψk-1, (6) где
cosΨk-1- g sin Ψk-1, (6) где  - абсолютное ускорение точки Oк-1 вдоль оси Y;
- абсолютное ускорение точки Oк-1 вдоль оси Y;
Ψk-1 - угол наклона оси става относительно вертикали в точке Oк-1.
Тогда приращение абсолютного угла поворота гироскопа 6 за время цикла Δ t:
ΔΨк-1= ωк-1*˙Δt, (7) где ωк-1* - абсолютная угловая скорость поворота оси става вокруг оси Х в точке размещения блока 4.
Аналогично для следующего блока 4 имеем:
a cosΨk - g sin Ψk; (8)
cosΨk - g sin Ψk; (8)
ΔΨк=ωк*Δt (9)
Регулярно, через интервалы времени Δt, ускорения и приращения углов (6)-(9) вводятся в каналы 7, 8 (блоки синхронизации работы измерителя и блоки ввода-вывода информации в каналах 7, 8 на чертежах для простоты не показаны).
Из рассмотрения фиг.2 следует, чтo:
Ψк-Ψк-1= ΔΨк-ΔΨк-1=δΨк*, (10) то есть приращение угла наклона оси става 3 на участке между точками Оk-1 и Ok равно разности приращений абсолютных углов поворота оси става в точках Ok-1 и Ok за время цикла, измеренных гироскопами 6 (k--1)-го и k-го блоков 4. Разность δΨк вырабатывается на выходе соответствующего сумматора 10.
Вычитая уравнение (6) из уравнения (8), с учетом (9) и (10) найдем в линейном приближении основное уравнение работы блока 13: = Δa
= Δa + gδΨ
+ gδΨ
Ψк-1 - поступает с выхода предшествующего сумматора 11; - вторая производная линейного отклонения точки Оk от точки Оk-1 вдоль оси Y (см. фиг.2).
- вторая производная линейного отклонения точки Оk от точки Оk-1 вдоль оси Y (см. фиг.2).
Из уравнения (11) следует, что для вычисления Δyk необходимо выходной сигнал сумматора 9 умножить на sec Ψк-1, для чего служит блок 32, к результату на сумматоре 31 прибавить величину Δ gk, вычисленную в соответствующем блоке 30, и сумму дважды проинтегрировать, это осуществляется в блоках 14, 15, результат является выходным сигналом блока 13.
С другой стороны, из рассмотрения фиг.2 следует уравнение:
Δyk= esin Ψк*, (12) где Ψк* - среднее значение угла наклона става на участке Oк-1, Ok, которое по теореме о среднем лежит между углами Ψк-1 и Ψк;
Ψк*= Ψкζк+Ψк-1(1-ζк), (13) где O< ζк<1 - коэффициент кривизны става на участке Ок-1, Oк, зависящий от упругости става на этом участке.
Из уравнений (12) и (13) найдем второе уравнение для приращения угла наклона:
δΨk=  arcsin
arcsin  -
-  (14)
(14)
Эта величина вычисляется блоками 16-19.
Невязка величин (10) и (11), вычисленная на сумматоре 20, вызвана собственными колебаниями, она поступает на фильтр 24, где из нее выделяется меняющаяся составляющая и через блоки 22, 23 и сумматоры 28, 29 подается в основной контур 13 для гашения собственных колебаний. Характеристический полином блока 15 устойчив, поэтому после окончания переходных процессов на выходах блоков 13 вырабатываются значения приращений линейных отклонений и углов наклона, причем погрешность вычисления не растет со временем. Они суммируются блоками 11 и 12, результирующие углы наклона става ΨN,θN поступают на выход измерителя, а суммарные линейные отклонения точки ON от точки O XN и YN подаются в блок 33, где по формулам (5) вырабатываются координаты точки ON, ϕN,λN, поступающие на выход измерителя.
Технико-экономические преимущества от реализации заявленного измерителя заключаются в повышении точности измерения координат конца става и расширения функциональных возможностей за счет измерения положения промежуточных точек става.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2439614C2 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ, ОРИЕНТАЦИИ И СТАБИЛИЗАЦИИ | 2008 |
|
RU2375679C2 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС ДЛЯ НАВИГАЦИИ И УПРАВЛЕНИЯ МОРСКИХ СУДОВ | 1997 |
|
RU2117253C1 |
| Устройство для экспериментального определения параметров бортовой и килевой качки судна по линии видимого горизонта | 1987 |
|
SU1437294A2 |
| Автоматические весы | 1987 |
|
SU1506307A1 |
| Способ выставки БИНС ЛА корабельного базирования и устройство для его осуществления | 2016 |
|
RU2635398C2 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2444759C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ О ПЕРЕМЕЩЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2436047C1 |
| СПОСОБ КОНТРОЛЯ НЕПОТОПЛЯЕМОСТИ СУДНА | 1991 |
|
RU2016812C1 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |


Изобретение относится к системам измерения и обработки информации и может быть использовано для определения линейного и углового отклонений упругого протяженного тела, одним концом закрепленного относительно заданной системы координат, в частности для измерения положения трубного става, погружаемого в воду с добывающего судна. Однородная распределенная информационная система обеспечивает измерение координат става с большой точностью за счет снижения величины результирующей (позиционной и накапливающейся во времени) погрешности измерения положения конца става и агрегата сбора по мере удаления (погружения) конца става от добывающего судна (поверхности моря). При этом равномерно по длине става установлены акселерометры и датчики угловой скорости (лазерные гироскопы), позволяющие получать информацию о динамических характеристиках и обобщенных параметрах става в условиях воздействия на него подводных возмущений. 1 з.п. ф-лы, 4 ил.
| Помыкаев И.И | |||
| и др | |||
| Навигационные приборы и системы | |||
| М.: Машиностроение, 1983, гл.9, с.9.3. |
