Изобретение относится к манипуляторам промышленных роботов и может быть использовано в области машиностроения для загрузки и разгрузки трубогибочных машин или металлообрабатывающих станков, а также на поточных линиях для последовательного выполнения двух технологических операций.
Известен управляемый гидроцилиндром двойного действия захват манипулятора по а.с.СССР N 87011. В нем штоки гидроцилиндра расположены коаксиально с возможностью осевого перемещения относительно друг друга. Внутренний шток шарнирно соединен с рычагами головки захвата, а наружный жестко соединен с головкой.
Существенными недостатками захвата манипулятора являются:
1. Нестабильный зажим заготовки в период перемещения головки захвата.
2. Отсутствие возможности выполнения гидроцилиндров длинноходовыми в связи с наличием пружины и направляющего паза, соединяющего подпружиненную поршневую полость с атмосферой.
3. Выполнение связанной с внутренним штоком подвижной штанги с выходом за пределы корпуса гидроцилиндра.
В другом известном устройстве исключается выход подвижной штанги за пределы корпуса гидроцилиндра, однако при сохранении поименованных п.1-3 недостатков, техническое решение выполнено со значительным увеличением габаритных размеров гидроцилиндра.
Техническим результатом предложенного изобретения является обеспечение постоянного усилия зажима.
Поставленная цель достигается в гидроцилиндре двойного действия, в корпусе которого коаксиально расположены штоки поршней, образующие штоковую, межпоршневую и поршневую полости, при этом во внутреннем штоке выполнен канал подвода жидкости в межпоршневую полость за счет того, что гидроцилиндр снабжен системой дифференциальной связи штоковой и межпоршневой полостей через введенный в устройство неподвижно связанный с крышкой плунжер. Плунжер расположен во внутреннем штоке эксцентрично, а канал подвода жидкости в межпоршневую полость выполнен со смещением относительно оси гидроцилиндра в сторону, противоположную от оси плунжера.
Связь штоковой и межпоршневой полостей гидроцилиндра обеспечивает возможность монтажа внутри его корпуса телескопического соединения с осуществлением подачи жидкости в межпоршневую полость через закрепленный на крышке гидроцилиндра плунжер и обеспечивает удержание губками захвата детали с постоянным, соответствующим настройке напорного золотника, усилием зажима при рабочем ходе гидроцилиндра.
Эксцентричное смещение плунжера телескопа относительно корпуса гидроцилиндра позволяет обеспечить линейное перемещение головки манипулятора без возможности ее вращения, благодаря чему устраняется направляющий паз, связывающий поршневую полость с атмосферой при возможности выполнения гидроцилиндров двойного действия с увеличенным ходом. Канал подвода жидкости в межпоршневую полость при этом выполнен в наиболее утолщенной стенке штока с противоположной по отношению к эксцентриситету стороны с рациональной экономией металла и уменьшением габаритных размеров гидроцилиндра.
На чертеже изображен гидроцилиндр двойного действия. Он содержит корпус 1, в котором коаксиально размещены поршень 2 с внутренним штоком 3 и шток 4 с поршнем 5. На штоке 4 смонтирована головка захвата 6, шарнирно связанная с двумя парами рычагов 7 и 8, которые несут зажимные губки 9, при этом рычаги 7 подвижно связаны со штоком 3. На крышке 10 гидроцилиндра с эксцентриситетом "Е" по отношению к оси корпуса 1 жестко закреплен плунжер 11, плунжерная полость 12 которого выполнена во внутреннем штоке 3. Между поршнем 2 и крышкой 10 гидроцилиндра расположена поршневая полость 13, а между поршнями 2 и 5 - межпоршневая полость 14 управления зажимом захвата. С противоположной стороны между поршнем 5 и корпусом 1 расположена штоковая полость 15, управляющая перемещением головки захвата. Магистрали 16 и 17 подвода рабочей жидкости к полостям 14 и 15 гидроцилиндра соединены между собой с образованием дифференциальной связи через плунжер 11 и на общей магистрали параллельно установлены два напорных золотника 18 и 19.
Напорный золотник 18 установлен с управлением от магистрали 16, а напорный золотник 19 - с управлением от магистрали 17, причем на участке управления золотником расположен дроссель 20. Плунжерная полость 12 каналом 21, выполненным во внутреннем штоке 3 с противоположной по отношению к эксцентриситету "Е" стороны, соединена с межпоршневой полостью 14.
Подача рабочей жидкости под давлением осуществляется по магистрали 22 через распределитель 23, соответственно: в поршневую полость 13 по магистрали 24 и в полости 14 и 15 по магистрали 25. На магистрали 25 установлен распределитель 26 режимов работы, переключением которого может быть образована двойная дифференциальная связь всех трех рабочих полостей гидроцилиндра для ускоренного ввода головки захвата в рабочую зону станка, или обеспечен режим одиночного хода для освобождения детали при остановке головки захвата после вывода ее из рабочей зоны станка. Управление распределителями 23 и 26 осуществляется с помощью электромагнитов 27, 28 и 29.
Гидроцилиндр двойного действия в устройстве с захватом манипулятора работает следующим образом:
В исходном положении головка 6 выдвинута, поршни 2 и 5 смещены в крайнее левое положение, зажимные губки 9 разведены. Для захвата детали поступает команда на включение электромагнита 27 распределителя 23 и жидкость под давлением по магистрали 25 и 16 через плунжерную полость 12 и канал 21 поступает в полость 14. Поршень 2 перемещается относительно поршня 5 и через шток 3, систему рычагов 7 и 8, зажимные губки 9 захватывают деталь. Давление в магистрали 16 поднимается до значения настройки напорного золотника 18, соответствующего заданному усилию зажима заготовки, в результате чего магистрали 16 и 17 соединяются. Жидкость поступает в полость 15, перемещая поршни 2 и 5 в правое положение, и деталь удаляется из зоны действия патрона станка. Поршневая полость 13 при этом магистралью 24 соединена со сливом.
В автоматическом режиме работы гидроцилиндра после подхода захвата с деталью к месту разгрузки поступает сигнал на отключение электромагнита 27 и включение электромагнита 28. Распределитель 23 устанавливается в положение, при котором полость 14 соединяется со сливом по магистралям 16 и 25, а в полость 13 производится подача жидкости под давлением. За счет усилия, создаваемого давлением в поршневой полости 13, при сливе жидкости из полости 14 губки 9 захвата расходятся и освобождают деталь. После освобождения детали и слива из полости 14 поршни 2 и 5 совмещаются и под действием давления в полости 13 соответственно поднимается давление в полости 15.
С поднятием в полости 15 давления до значения настройки напорного золотника 19 магистрали 17 и 25 соединяются и с перемещением головки 6 захвата жидкость из полости 15 поступает на слив. В конце хода головки 6 электромагнит 28 отключается, распределитель 23 устанавливается в нейтральное положение и цикл работы гидроцилиндра заканчивается. В автоматическом режиме работы гидроцилиндра в начале следующего цикла до включения электромагнита 27, например, с помощью реле времени, может быть предусмотрена пауза.
Для ускоренного ввода головки 6 в рабочую зону станка совместно с электромагнитом 28 включается электромагнит 29, при этом магистраль 16 соединяется с магистралью 24, полностью исключается возможность поступления жидкости на слив и обеспечивается двойная дифференциальная связь всех трех рабочих полостей гидроцилиндра.
В режиме одиночного хода, после вывода детали из рабочей зоны станка до отключения электромагнита 27 осуществляется включение электромагнита 26, при этом жидкость из полости 14 по магистралям 16 и 24 поступает на слив и деталь освобождается губками 9 захвата. В этом режиме после слива жидкости из полости 14 электромагниты 26 и 27 отключаются и работа гидроцилиндра прекращается до начала следующего цикла.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАЖИМНОЕ УСТРОЙСТВО ТРУБОГИБОЧНОЙ МАШИНЫ | 1992 |
|
RU2025166C1 |
| Литьевая машина | 1986 |
|
SU1361006A1 |
| Машина для контактной стыковой сварки | 1982 |
|
SU1103971A1 |
| УСТРОЙСТВО ДЛЯ ГИБКИ ТРУБ | 1990 |
|
RU2044585C1 |
| Автоматический формовочный агрегат | 1990 |
|
SU1827347A1 |
| Вальцешлифовальный станок для обработки валков в собственных подшипниках | 1975 |
|
SU556029A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД | 1998 |
|
RU2148196C1 |
| Привод гидравлического пресса | 1983 |
|
SU1147597A1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ИЗДЕЛИЙ ИЗ БЕТОННЫХ СМЕСЕЙ | 1992 |
|
RU2031781C1 |
| УСТАНОВКА ДЛЯ ПРИНУДИТЕЛЬНОГО СПУСКА ТРУБ В СКВАЖИНУ ПОД ДАВЛЕНИЕМ | 1995 |
|
RU2098594C1 |
Использование: в манипуляторах промышленных роботов, например, для сталкивания изделия с конвейера до установки его на упор с последующей маркировкой или нанесением рельефного рисунка. Сущность изобретения: гидроцилиндр содержит пару поршней с коаксиально расположенными относительно друг друга штоками и смонтированный в поршневой полости телескоп, через который связаны его штоковая и межпоршневая полости с параллельной установкой на линии связи двух напорных золотников. Плунжер телескопа смонтирован на крышке с эксцентричным смещением относительно корпуса, а выполненный во внутреннем штоке канал подвода жидкости и межпоршневую полость расположен с противоположной по отношению к эксцентриситету стороны. При поступлении жидкости в полость 14 поршень 2 перемещается относительно поршня 5 и через шток 3, систему рычагов 7 и 8 зажимные губки 9 захватывают деталь. С поднятием в магистрали 16 давления срабатывает напорный золотник 18, и жидкость поступает в полость 15, перемещая поршни 2 и 5 в правое положение. В позиции разгрузки рабочая жидкость подается в полость 13, а полость 14 соединяется со сливом. После освобождения детали и слива из полости 14 поршни 2 и 5 совмещаются. С поднятием давления в полости 15 через напорный золотник 19 она соединяется со сливом и головка 6 захвата возвращается в исходное положение. 1 з.п. ф-лы, 1 ил.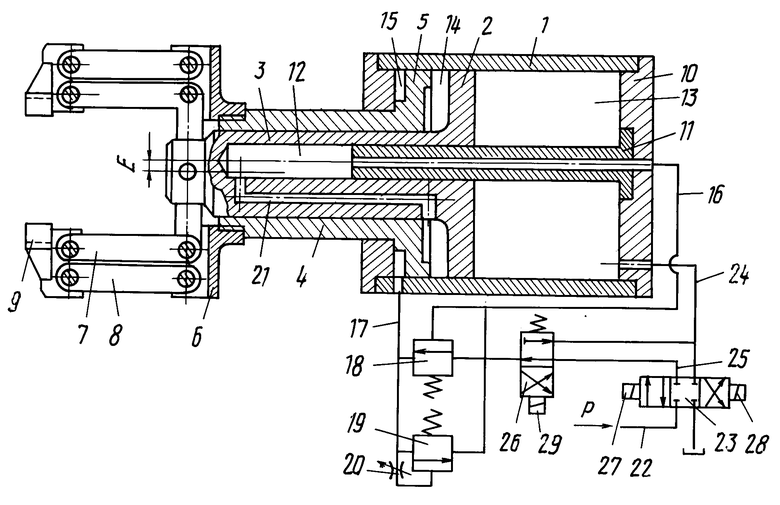
| Захват манипулятора | 1980 |
|
SU984861A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
