1
Изобретение относится к манипуляторам промышлейных роботов, в частности к захватным головкам, и может быть использовано в машиностроении для загрузки и разгрузки станков.
По основному авт. св. № 870111 известен захват манипулятора, содержаший силовой цилиндр с двумя штоками, кинематически связанный с рычагами головки захвата, причем штоки силового цилиндра расположень коаксиально с возможностью продольного перемещения друг относительно друга, при этом внутренний, шток шарнирно соединен с рычагами головки захвата, а наружный жестко связан с этой головкой 1 .
Недостатком известного захвата является то, что величина перемещения головки захвата с удерживаемой деталью, определяемая ходом поршня с наружным штоком, не может быть отрегулирована в зависимости от длийы детали, что приводит к непроизводительным потерям энергии и снижению технологических возможностей захвата.
Цель изобретения - расширение технологических возможностей устройства.
Указанная цель достигается тем, что захват снабжен тягой и концентрично расположенными направляющими гильзами, причем тяга одним концом соединена со штоками силовых цилиндров, а другим -
5 с направляющими гильзами.
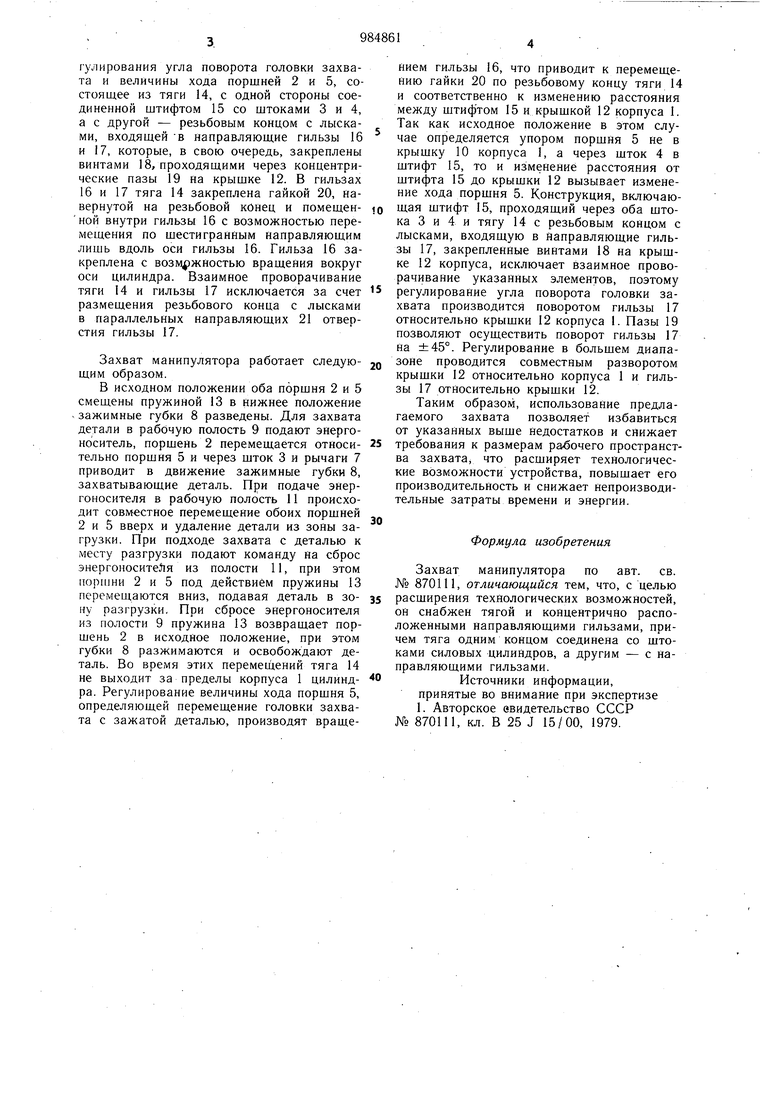
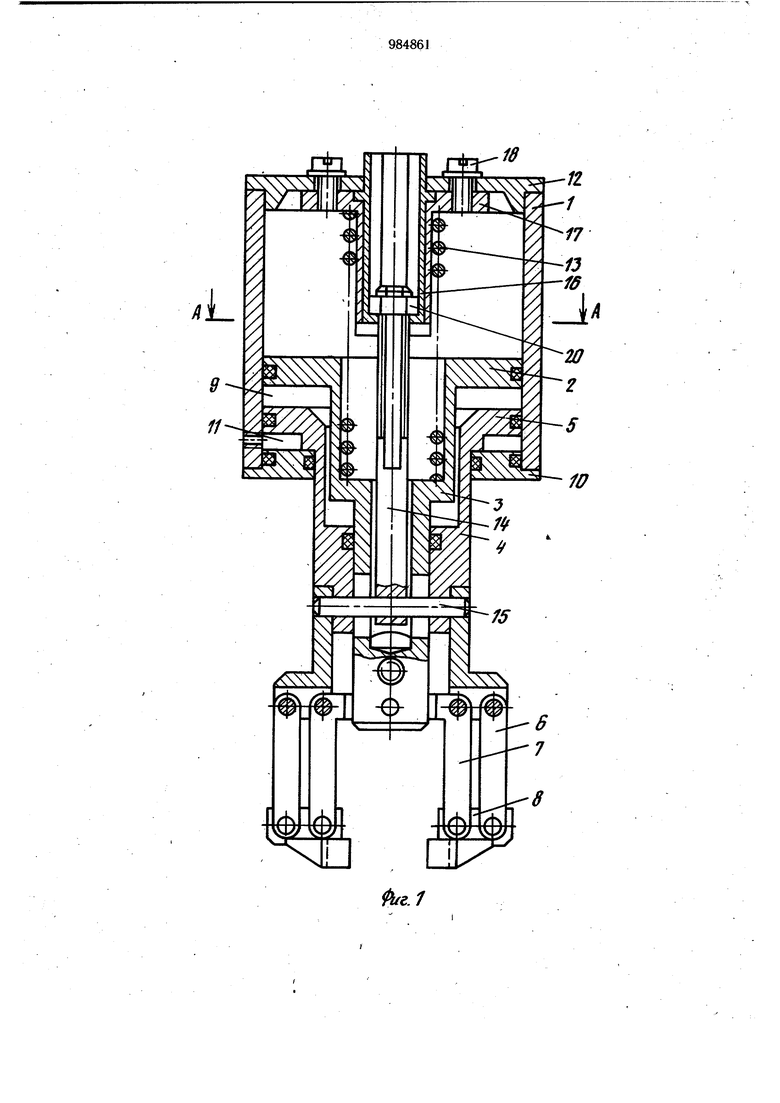
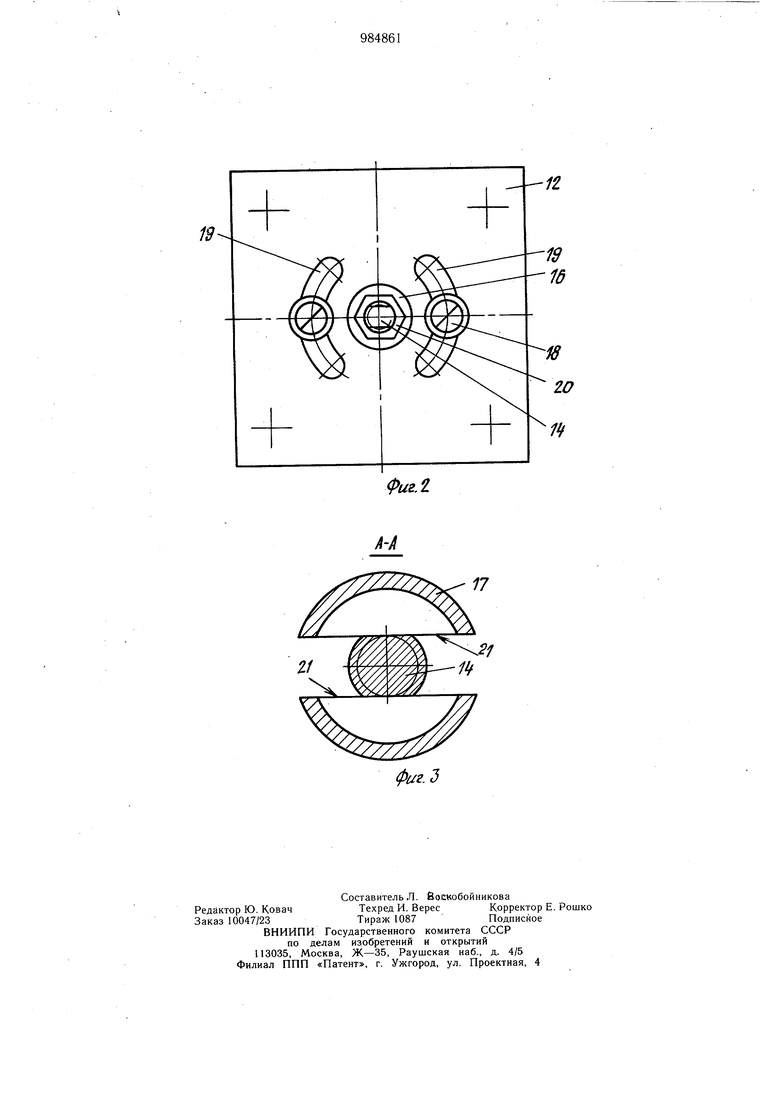
На фиг. 1 изображен захват манипулятора, общий вид; на фиг. 2 - то же, вид сверху; йа фиг. 3 - разрез А-А на фиг. 1. Захват манипулятора включает корпус 1 цилиндра, в котором размещены поршень 2 со штоком 3, проходящим внутри штока 4 порщня 5. На штоке 4 жестко закреплена головка захвата, состоящая из рычагов 6 и 7, соединенных с зажимными губками 8. Рычаги 7 подвижно связаны со штоком 3.
15 Между порщнями 2 и 5 находится рабочая полость 9 силового цилиндра, а между поршнем 5 и крышкой 10 корпуса 1 - рабочая полость 11. Подача энергоносителя в рабочие полости 9 и 11 производится Через отверстия в корпусе 1 цилиндра
20 и щтоке 3. Между крышкой 12 корпуса 1 и поршнем 2 расположена пружина 13 служащая для возврата порщней 2 и 5 в исходное положение. Внутри корпуса 1 цилиндра расположено устройство для регулирования угла поворота головки захвата и величины хода поршней 2 и 5, состоящее из тяги 14, с одной стороны соединенной штифтом 15 со штоками 3 и 4, а с другой - резьбовым концом с лысками, входящей В направляюш,ие гильзы 16 и 17, которые, в свою очередь, закреплены винтами 18, проходящими через концентрические пазы 19 на крышке 12. В гильзах 16 и 17 тяга 14 закреплена гайкой 20, навернутой на резьбовой конец и помещенной внутри гильзы 16 с возможностью перемещения по шестигранным направляющим лишь вдоль оси гильзы 16. Гильза 16 закреплена с возм зжностью вращения вокруг оси цилиндра. Взаимное проворачивание тяги 14 и гильзы 17 исключается за счет размещения резьбового конца с лысками в параллельных направляющих 21 отверстия гильзы 17.
Захват манипулятора работает следующим образом.
В исходном положении оба поршня 2 и 5 смещены пружиной 13 в нижнее положение . зажимные губки 8 разведены. Для захвата детали в рабочую полость 9 подают энергоноситель, поршень 2 перемещается относительно поршня 5 и через шток 3 и рычаги 7 приводит в движение зажимные губки 8, захватывающие деталь. При подаче энергоносителя в рабочую полость 11 происходит совместное перемещение обоих поршней 2 и 5 вверх и удаление детали из зоны загрузки. При подходе захвата с деталью к месту разгрузки подают команду на сброс энергоносителя из полости 11, при этом поршни 2 и 5 под действием пружины 13 перемещаются вниз, подавая деталь в зону разгрузки. При сбросе энергоносителя из полости 9 пружина 13 возвращает поршень 2 в исходное положение, при этом губки 8 разжимаются и освобождают деталь. Во время этих перемепд,ений тяга 14 не выходит за пределы корпуса 1 цилиндра. Регулирование величины хода поршня 5, определяющей перемещение головки захвата с зажатой деталью, производят вращением гильзы 16, что приводит к перемещению гайки 20 по резьбовому концу тяги 14 и соответственно к изменению расстояния между штифтом 15 и крышкой 12 корпуса 1. Так как исходное положение в этом случае определяется упором поршня 5 не в крышку 10 корпуса 1, а через шток 4 в штифт 15, то и изменение расстояния от штифта 15 до крышки 12 вызывает изменение хода поршня 5. Конструкция, включающая щтифт 15, проходящий через оба штока 3 и 4 и тягу 14 с резьбовым концом с лысками, входящую в направляющие гильзы 17, закрепленные винтами 18 на крыщке 12 корпуса, исключает взаимное проворачивание указанных элементов, поэтому регулирование угла поворота головки захвата производится поворотом гильзы 17 относительно крышки 12 корпуса 1. Пазы 19 позволяют осуществить поворот гильзы 17 на ±45°. Регулирование в большем диапазоне проводится совместным разворотом крышки 12 относительно корпуса 1 и гильзы 17 относительно крышки 12.
Таким образом, использование предлагаемого захвата позволяет избавиться от указанных выше недостатков и снижает требования к размерам рабочего пространства захвата, что расширяет технологические возможности устройства, повышает его производительность и снижает непроизводительные затраты времени и энергии.
Формула изобретения
Захват манипулятора по авт. св. № 870111, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен тягой и концентрично расположенными направляющими гильзами, причем тяга одним концом соединена со штоками силовых цилиндров, а другим - с направляющими гильзами.
Источники информации, принятые во внимание при экспертизе 1. Авторское евидетельство СССР № 870111, кл. В 25 J 15/00, 1979.
fe./
12
If
иг.г
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1979 |
|
SU870111A1 |
| Захват манипулятора промышленного робота | 1990 |
|
SU1745542A1 |
| Хобот манипулятора | 1979 |
|
SU829307A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Схват манипулятора | 1987 |
|
SU1470500A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Захватная головка манипулятора | 1980 |
|
SU897379A1 |
| СЕЛЕКЦИОННЫЙ КОМБАЙН С УСТРОЙСТВОМ ДЛЯ УЧЕТА СОБРАННОЙ МАССЫ | 1992 |
|
RU2045149C1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Захватное устройство манипулятора | 1990 |
|
SU1756146A1 |
фиг.д
