Изобретение относится к машиностроению и может быть использовано в конструкциях манипуляторов и роботов.
Известен манипулятор, содержащий основание, привод с шарнирными кривошипами, корпуса с выдвижными штангами, гибкие элементы, закрепленные на выдвижной штанге, и упругие звенья с двуплечими рычагами, кинематически связанные между собой и звеньями, а также барабаны, жестко закрепленные на основании.
Основным недостатком данного манипулятора являются сложность и громоздкость конструкции с многими деталями, узлами, что в свою очередь требует сложной настройки при эксплуатации.
Близким техническим решением, принятым за прототип, является манипулятор, содержащий привод, основание с валом, на котором установлена опора с закрепленной рукой и схватом, ременную и червячную передачи, кулачковый механизм с роликами, контактирующими с рабочей поверхностью кулачков, гипоциклонный механизм, зубчатые передачи с зубчатым механизмом, основной и дополнительный кулачковые механизмы.
Данное техническое решение характеризуется наличием многочисленных конструктивных элементов, приводимых в действие червячными и ременными передачами, что в целом усложняет регулировку взаимодействия узлов и снижает надежность в работе.
Целью изобретения является упрощение конструкции и повышение надежности в работе.
Это достигается тем, что манипулятор, содержащий корпус основания с неподвижной вертикальной осью, на которой надета трубчатая поворотная колонка, электродвигатель с зубчатой передачей для вращения трубчатой поворотной колонки вокруг вертикальной оси, стрелу с механической рукой, оснащенной электромагнитным захватом, снабжен устройством в виде выпуклого сверху, усеченного конуса со сквозной внутренней вертикальной прорезью, шарнирно смонтированного с возможностью контакта и фиксирования нижним основанием на шаровой поверхности верхнего конца вертикальной неподвижной оси, и ось ролика, контактирующего с боковой поверхностью усеченного конуса, жестко и перпендикулярно закреплена на малом плече шарнирно смонтированной на корпусе поворотной колонки стрелы, причем верхнее плечо шарнирно закрепленной на конце стрелы механической руки шарнирно связано концом со штангой, шарнирно связанной также вторым концом с кронштейном на поворотной колонне.
Сравнение заявляемого технического решения с другими разработками показывает, что аналогичные конструкции известны. Однако заявляемое техническое решение обладает следующими отличительными признаками.
Предлагаемый манипулятор снабжен устройством в виде выпуклого сверху, усеченного конуса со сквозной внутренней вертикальной прорезью и шарнирно смонтированного с возможностью контакта, а также фиксирования нижним основанием на шаровой поверхности верхнего конца вертикальной неподвижной оси.
Выпуклая поверхность верхнего основания усеченного конуса обеспечивает возможность фиксирования его зажимом при отклонении в сторону от вертикали. А усеченный конус при наличии сквозной вертикальной щели может поворачиваться вокруг вертикальной оси и также отклоняться под различными углами в любую сторону с последующей фиксацией в заданном положении.
Ось ролика, контактирующего с боковой поверхностью усеченного конца, перпендикулярно жестко закреплена на малом плече шарнирно закрепленной стрелы на поворотной колонне. Это обеспечивает стреле при повороте вместе с трубчатой колонной вокруг вертикальной оси одновременное перемещение конца стрелы вверх или вниз под различными углами. Верхнее плечо механической руки шарнирно закрепленной на конце стрелы шарнирно связано со штангой, шарнирно соединенной своим вторым концом с кронштейном, смонтированным на поворотной колонке.
Это позволяет при подъеме и опускании стрелы одновременно автоматически совершать поворот механической руки вокруг оси на конце стрелы и этим самым менять величину радиуса между вертикальной осью, вокруг которой поворачивается стрела, и концом механической руки, на котором смонтирован захват перемещающий деталь.
Таким образом, в предлагаемом техническом решении манипулятор может перемещать детали по сложной траектории при наличии лишь одного электродвигателя вместо трех.
Отмеченные свойства отличительных признаков заявляемого технического решения позволяют получить положительный эффект, что соответствует критерию "существенные отличия".
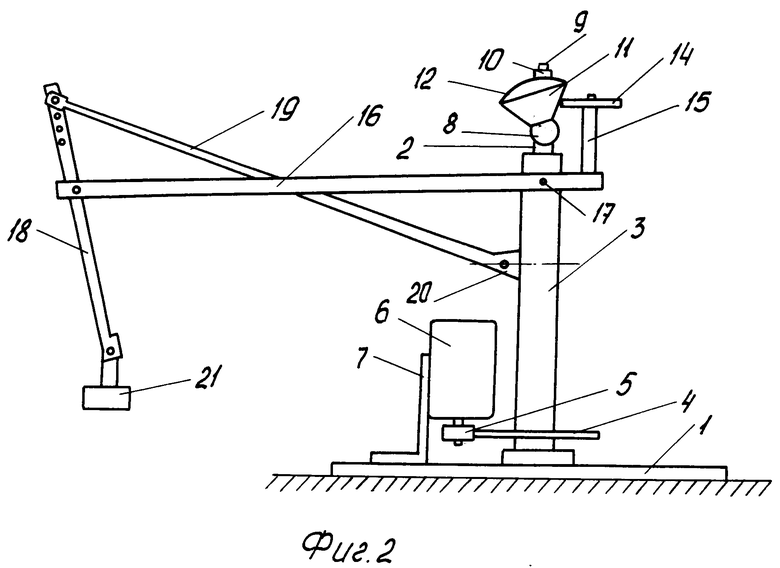
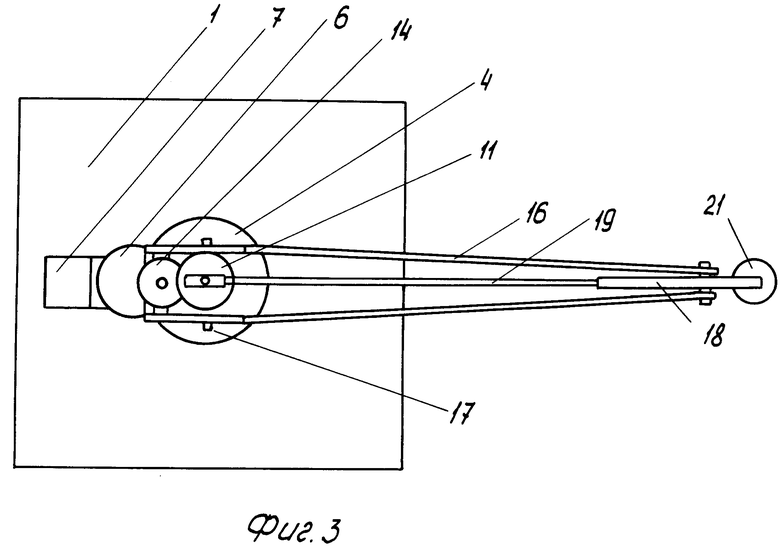
На фиг. 1 изображена схема манипулятора, вид сбоку, при верхнем положении стрелы; на фиг.2 - то же, при нижнем положении стрелы; на фиг.3 - манипулятор, вид сверху; на фиг.4 - конструкция усеченного конуса, вид сбоку; на фиг.5 - то же, вид сверху.
На корпусе 1 манипулятора смонтирована вертикальная ось 2, на которую надета трубчатая колонна 3 с приводным зубчатым колесом 4, входящим в зацепление с ведущим зубчатым колесом 5, оснащенным редуктором электродвигателя 6, установленным на кронштейне 7. Верхний конец вертикальной оси 2 имеет шаровую поверхность 8 и стержень 9 с зажимом 10, а также усеченный конус 11 с выпуклой верхней частью 12 и сквозной прорезью 13. С боковой поверхностью усеченного конуса входит в контакт ролик 14, установленный на оси 15, закрепленной на малом плече стрелы 16, закрепленной на горизонтальной оси 17, на трубчатой колонне 3. На конце стрелы 16 шарнирно смонтирована механическая рука 18, к верхнему плечу которой шарнирно подсоединена штанга 19, нижний конец которой закреплен на кронштейне 20, установленном на трубчатой колонке 3. На нижнем конце механической руки 18 закреплен электромагнитный захват 21.
Работа манипулятора осуществляется следующим образом.
При включении в действие электродвигателя 7 через шестерню 5 осуществляется вращение шестерни 4 вместе с трубчатой колонкой 3, на которой шарнирно смонтирована стрела 14. Если конус 11 будет закреплен симметрично, то стрела 14 при повороте на 360о вокруг вертикальной оси будет находиться на одном уровне по высоте. При отклонении конуса 11, например, влево фиксирования его в этом положении зажимом 11 (фиг.1) соприкасающийся с боковой поверхностью конуса 11 ролик 12 через ось 13, закрепленную на стреле 14, поднимает стрелу вверх. В результате подъема конца стрелы 14 вверх посредством штанги 17 отклоняется вверх и нижний конец механической руки 16 вместе с электромагнитным захватом 19. При развороте на 180о вокруг вертикальной оси стрела 14 и механическая рука занимают положение на фиг.2. Перемещаемые детали могут, например, при включении электромагнита 19 захватываться в положении стрелы, показанном на фиг.2, и сбрасываться при положении стрелы на фиг.1, где деталь оказывается перемещенной и на большие высоту и расстояние по сравнению с тем, откуда деталь перемещалась в начале транспортирования. Остальные положения стрелы будут промежуточные со сложной, управляемой траекторией перемещения стрелы посредством соответствующего закрепленного положения конуса.
Преимущество предлагаемого технического решения состоит в том, что универсальность и надежность его работы достигаются за счет перемещения усеченного регулируемого конуса и шарнирно закрепленной штанги, соединяющей конец механической руки с поворотной колонной.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022779C1 |
| АДАПТИВНЫЙ ЗАХВАТ РУКИ МАНИПУЛЯТОРА | 1991 |
|
RU2022778C1 |
| МАГНИТНЫЙ ЗАХВАТ МАНИПУЛЯТОРА | 1990 |
|
RU2016757C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022777C1 |
| ПРИВОДНОЕ УСТРОЙСТВО КОВШОВОЙ ПОГРУЗОЧНОЙ МАШИНЫ | 1991 |
|
RU2012821C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1991 |
|
RU2014397C1 |
| ВАКУУМНЫЙ ЗАХВАТ | 1990 |
|
RU2091208C1 |
| КАНАТНАЯ СКРЕПЕРНАЯ УСТАНОВКА | 1991 |
|
RU2011751C1 |
| МАНИПУЛЯТОР | 1991 |
|
RU2022769C1 |
| ЗАГРУЗОЧНОЕ УСТРОЙСТВО ЛЕНТОЧНОГО КОНВЕЙЕРА | 1991 |
|
RU2017680C1 |


Использование: в машиностроении, в частности в конструкциях манипуляторов и роботов. На вертикальной неподвижной оси 2 на шаровой поверхности 8 шарнирно смонтирован усеченный конус 11 с выпуклой верхней частью 12. При этом боковая поверхность усеченного конуса контактирует с закрепленным на малом плече стрелы 10 роликом 14, а верхнее плечо шарнирно закрепленной на стреле механической руки 18 штанги 19 соединено шарнирно с трубчатой колонкой 3. 5 ил.
МАНИПУЛЯТОР, содержащий корпус с неподвижной вертикальной осью, на которой расположена трубчатая, приводная от электродвигателя колонка, и стрелу с механической рукой, оснащенной электромагнитным захатом, отличающийся тем, что он снабжен штангой и устройством, выполненным в виде полого усеченного конуса, имеющего выпуклое основание большего диаметра со сквозной прорезью на нем,а на конце вертикальной оси выполнена шаровая поверхность, на которой шарнирно смонтирован основанием меньшего диаметра с возможностью фиксирования на шаровой поверхности указанный конус, при этом на одном конце стрелы смонтирован дополнительно введенный ролик, контактирующий с боковой поверхностью усеченного конуса, а на другом плече - шарнирно закреплена механическая рука, шарнирно связанная со штангой, которая также шарнирно соединена с кронштейном, дополнительно смонтированным на поворотной колонке.
| Шиберный затвор | 1987 |
|
SU1521677A1 |
