Изобретение относится к робототехнике для использования в конструкциях промышленных роботов и манипуляторов.
Известно устройство для подачи заготовок, содержащее двуплечие рычаги, шарнирно связанные между собой зажимные губки, каждая из которых установлена на одном из концов двуплечего рычага, связанного со штоком силового цилиндра.
Недостатком этого технического решения является сложность конструкции и ненадежность в работе.
Близким техническим решением, принятым за прототип, является клещевой захват для удержания и перемещения материала, содержащий два двуплечих рычага, шарнирно связанных между собой и силовым цилиндром и зажимными губками.
Недостатком этого технического решения является низкая надежность захвата перемещаемых грузов.
Целью изобретения является повышение надежности работы.
Это достигается тем, что адаптивное захватное устройство, содержащее корпус, механическую руку, силовой цилиндр, снабжено захватным механизмом, выполненным в виде размещенных в пазах с наклонными опорными стенками в вертикальных стойках шарнирно соединенных между собой обрезиненных роликов разного диаметра, из которых ролик меньшего диаметра установлен ниже ролика, имеющего больший диаметр, а одна из пар роликов соединена шарнирно кронштейном со штоком силового цилиндра.
Сравнение заявляемого технического решения с другими разработками показывает, что аналогичные конструкции известны. Однако изобретение обладает следующими отличительными признаками.
Захватный механизм выполнен в виде размещенных в пазах с наклонными опорными стенками в вертикальных стойках шарнирно соединенных между собой обрезиненных роликов, что обеспечивает надежный захват груза, размещенного между роликами, так как ролики, находясь между стенкой наружной поверхности груза и наклонной опорной поверхностью в пазах, перемещаясь вместе с грузом на некоторую величину вниз, все сильнее сжимают груз, удерживая его в корпусе захватного устройства. При этом контактирующие обрезиненные поверхности роликов, соприкасаясь с поверхностью груза, обеспечивают высокий коэффициент трения, что повышает надежность удержания захватываемого груза.
Захватное устройство оснащено обрезиненными парными роликами разного диаметра, где ролики меньшего диаметра размещены под роликом большего диаметра. При этом диаметры роликов рассчитаны так, что, прикасаясь рабочими поверхностями к опорной наклонной стенке в пазу, оба ролика с одинаковым усилием равномерно соприкасаются и с вертикальной поверхностью перемещаемого груза. Кроме того, наличие двух роликов в каждой прорези паза обеспечивает необходимые условия для устойчивости захвата груза без возникновения отклонений его вокруг горизонтальной поперечной оси относительно корпуса захватного устройства. Это повышает надежность захвата.
Ролики попарно соединяются между собой шарнирно посредством кронштейна, что обеспечивает постоянную базу между роликами и в результате определяет равномерную полезную нагрузку на каждый из роликов.
Совокупность существенных отличительных признаков заявляемого технического решения проявляет новые свойства, дающие положительный эффект, что позволяет сделать вывод о его соответствии критерию "существенные отличия".
На фиг. 1 показано захватное устройство с удерживаемым грузом, общий вид; на фиг.2 - то же, с грузом, освобожденным от захвата.
Адаптивное захватное устройство содержит корпус 1, присоединенный к механической руке 2. К корпусу снизу присоединена жестко вертикальная правая стойка 3, на которой закреплен силовой цилиндр 4 со штоком 5. Левая вертикальная стойка 6 смонтирована на корпусе с возможностью перемещения в пазу 7 с последующим фиксированием зажимом 8. В вертикальных стойках 3 и 6 имеются клиновидные пазы 9 с наклонными опорными стенками 10. В клиновидных пазах 9 размещены обрезиненные ролики 11 и 12, шарнирно соединенные кронштейном 13, а на правой стойке 3 кронштейн 13 связан с кронштейном 14 для соединения скользящей посадкой со штоком 5. Между вертикальными стойками 3 и 6 размещен груз 15.
Захват работает следующим образом.
Посредством механической руки устройство устанавливается над перемещаемым грузом и затем опускается. В результате груз 15 оказывается между роликами, размещенными в пазах 9 стоек 3, 6. Как только механическая рука 2 вместе с адаптивным устройством поднимается над погрузочной площадкой, груз оказывается зажатым между роликами (фиг.1). После перемещения груза на разгрузочную площадку его опускают на эту площадку. Для освобождения захватного устройства от груза шток 5 силового цилиндра 4 поднимается в верхнее положение и через кронштейн 14 перемещаются ролики 11 и 12 в пазу правой стойки. При этом зажатие груза между роликами прекращается (фиг.2) и захватное устройство перемещается за новым грузом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022777C1 |
| АДАПТИВНЫЙ ЗАХВАТ РУКИ МАНИПУЛЯТОРА | 1991 |
|
RU2022778C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ЗАГОТОВОК В ПРЕСС | 1993 |
|
RU2063287C1 |
| Захватное устройство | 1990 |
|
SU1796453A1 |
| МАГНИТНЫЙ ЗАХВАТ МАНИПУЛЯТОРА | 1990 |
|
RU2016757C1 |
| МАНИПУЛЯТОР | 1991 |
|
RU2022784C1 |
| Адаптивное захватное устройство | 1986 |
|
SU1399114A1 |
| Адаптивный вакуумный захват | 1991 |
|
SU1816690A1 |
| Пресс для вырубания обувных деталей из листового материала | 1986 |
|
SU1463215A1 |

Изобретение относится к робототехнике для использования в конструкциях промышленных роботов и манипуляторов. Захватное устройство содержит корпус 1 с вертикальными стойками 3 и 6 с клиновидными пазами 9, в которых размещены обрезиненные ролики 11 и 12 разного диаметра, предназначенные для зажима груза 15. Преимущественно данного захвата состоит в способности удерживать и перемещать грузы в широких диапазонах их веса и габаритов. 2 ил.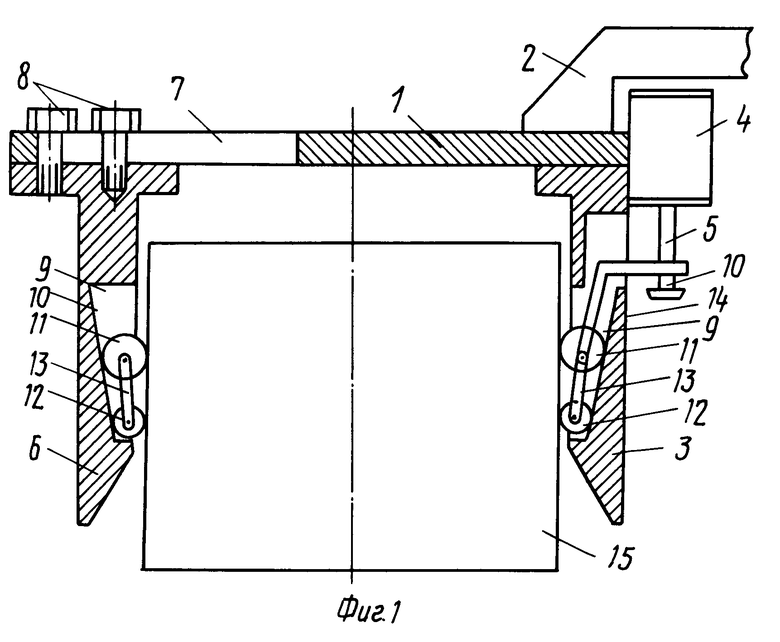
ЗАХВАТНОЕ УСТРОЙСТВО, содержащее корпус, выполненный в виде вертикальных стоек, механическую руку, силовой цилиндр, зажимные элементы в виде роликов, размещенных в пазах вертикальных стоек, выполненных с клинообразными поверхностями, при этом одна из вертикальных стоек имеет возможность наладочного перемещения, отличающееся тем, что, с целью повышения надежности в работе, оно снабжено кронштейном, установленным в сквозном пазу одной из вертикальных стоек и связанным одним концом с зажимным элементом, а другим - со штоком силового цилиндра, при этом зажимные элементы выполнены в виде двух спаренных роликов разного диаметра, связанных между собой дополнительно введенной соединительной планкой, причем ролик меньшего диаметра установлен ниже ролика большего диаметра.
| ОХЛАЖДАЮЩЕЕ УСТРОЙСТВО ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1992 |
|
RU2047831C1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
