Изобретение относится к машиностроению, в частности к захватам адаптивных робототехнических устройств.
Известен электромагнитный захват, содержащий ярмо, катушку возбуждения, усилитель тока, систему питания катушки возбуждения, датчик веса.
Недостатком такого захвата является применение его лишь с деталями, размещенными в таре.
Известно также захватное устройство, где магнитный поток проходит через деталь при поперечном относительно полюсных наконечников положении поворотного блока или ротора.
Общим недостатком названных захватов является наличие в них электроэлементов (электромагнит, датчик веса, система управления силовым электромагнитом и устройства контроля). Кроме того, названные устройства не могут адаптироваться на удержание определенных и сбрасывание лишних деталей.
Цель изобретения - расширение технологических возможностей.
Поставленная цель достигается тем, что захват манипулятора, содержащий полюсные наконечники и расположенный между ними поворотный блок, выполненный в виде постоянного магнита, снабженного приводом поворота, согласно изобретению снабжен корпусом, а привод поворота выполнен в виде гибкого элемента и ступенчатого кольцевого сектора из немагнитного материала, на каждой ступеньке которого выполнена канавка, причем кольцевой сектор и один конец гибкого элемента закреплены на боковой поверхности поворотного блока, а другой конец гибкого элемента закреплен на руке манипулятора, при этом гибкий элемент расположен в одной из канавок кольцевого сектора, а поворотный блок подпружинен относительно корпуса.
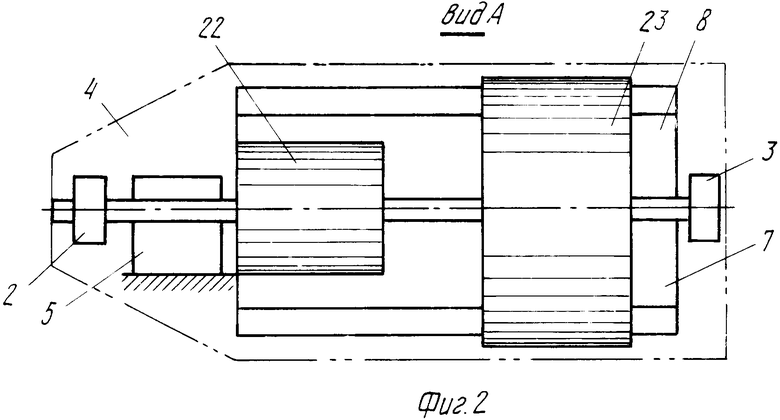
На фиг. 1 схематически изображен магнитный захват манипулятора; на фиг. 2 - вид по стрелке А на фиг. 1.
Захват содержит двухопорный диаметрально намагниченный поворотный блок 1 в форме цилиндра с опорными подшипниками 2 и 3, смонтированными в корпусе 4. Поворотный блок 1 снабжен приводом поворота в виде гибкого элемента 5 в форме ленточной пружины, один конец которой закреплен на корпусе 4, а другой - на оси 6 поворотного блока. Вплотную к поворотному блоку смонтированы полюсные наконечники 7 и 8, образующие статор захвата. Полюсные наконечники имеют наклонные рабочие поверхности 9 и в них выполнены прорези 10. На поворотном блоке 1 закреплен ступенчатый кольцевой сектор 11, размещенный против прорези 10. На секторе 11 имеются профилированные канавки 12, 13 и 14, размещенные на разной высоте и с разными законами изменения ее относительно поворотного блока 1. В корпусе 4 установлена втулка 15, в которой смонтирована концевая часть механической руки 16 манипулятора, опирающаяся на шарики 17. Втулка 15 и механическая рука 16 образуют поступательную пару. К концу 18 кольцевого сектора прикреплен шнур 19, размещенный в канавке 12. Точка крепления шнура 19 к кольцевому сектору расположена в плоскости горизонтальной оси Б-Б. Другой конец шнура закреплен на механической руке 16 и опирается на ролик 20. Неподвижно закрепленная вилка 21 смонтирована в зоне разгрузки захватываемых деталей 22 и 23.
Магнитный захват манипулятора работает следующим образом.
С помощью механической руки 16 захват опускается вдоль оси OZ до соприкосновении захвата с деталями 22 и 23. Затем механическая рука манипулятора поднимается на заданную высоту. При этом в большинстве случаев захватом поднимается несколько деталей, висящих на захвате. Под действием веса деталей механическая рука 16 перемещается относительно корпуса 4, натягивая шнур 19. При этом поворотный блок 1 поворачивается на некоторый угол α , определяемый весом захватываемых деталей. Одна из деталей (например, деталь 22) легче другой (деталь 23). Поворот блока 1 приводит к шунтированию магнитного потока полюсными наконечниками 7 и 8 и ослаблению сил притяжения. Деталь 23, как более тяжелая, отпадает от захвата.
В результате поворотный блок 1 поворачивается в обратную сторону и угол α уменьшается. Усилие захвата детали 22 после этого возрастает, захват позиционируется механической рукой 16 в позицию разгрузки и рука вводится в вилку 21. После этого рука 16 поднимает захват, корпус 4 которого упирается в неподвижную вилку 21, а механическая рука тянет за шнур 19, поворачивая поворотный блок 1 на 90о, что приводит к короткому замыканию магнитного потока поворотного блока 1 и выключению захвата, а деталь 22 падает на место разгрузки.
Настройку захвата манипулятора для работы с деталями различного веса можно производить переставляя шнур 19 в соответствующую канавку 12, 13 и 14 на секторе 11, что позволяет менять передаточные отношения кинематического звена преобразования перемещения механической руки 16 захвата в угол поворота блока 1.
Магнитный захват манипулятора представляет собой наиболее простую конструкцию, поскольку в нем отсутствуют такие элементы как электромагнит с катушкой, генератор убывающего тока с цепями управления, датчик веса деталей, переключатель, усилитель мощности, компаратор, потенциометр, реле. Кроме того, в захвате отсутствуют электромагниты, что позволяет его применять во взрывоопасной среде.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 1991 |
|
RU2022784C1 |
| ВАКУУМНЫЙ ЗАХВАТ | 1990 |
|
RU2091208C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022777C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022779C1 |
| АДАПТИВНЫЙ ЗАХВАТ РУКИ МАНИПУЛЯТОРА | 1991 |
|
RU2022778C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ НАПРАВЛЕНИЯ ВРАЩЕНИЯ ВАЛА | 1990 |
|
RU2017158C1 |
| УСТРОЙСТВО ДЛЯ СМЕШИВАНИЯ ВЯЗКИХ МАСС | 1991 |
|
RU2018913C1 |
| Схват манипулятора | 1990 |
|
SU1756145A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ЗАГОТОВОК В ПРЕСС | 1993 |
|
RU2063287C1 |
Использование: машиностроение, в захватных органах манипуляторов. Сущность изобретения: захват содержит корпус 4, полюсные наконечники 7 и 8, поворотный блок 1 с приводом его поворота. Поворотный блок выполнен в виде постоянного магнита, а привод поворота - в виде гибкого элемента (шнур) 19 и ступенчатого кольцевого сектора 11. Один конец гибкого элемента 19 и кольцевой сектор 11 закреплены на боковой поверхности поворотного блока. Другой конец гибкого элемента 19 закреплен на руке 16 манипулятора. При этом гибкий элемент 19 расположен в одной из канавок, выполненных на каждой ступеньке кольцевого сектора 11. При работе с деталями различного веса гибкий элемент 19 переставляется в соответствующую канавку на секторе 11. 2 ил.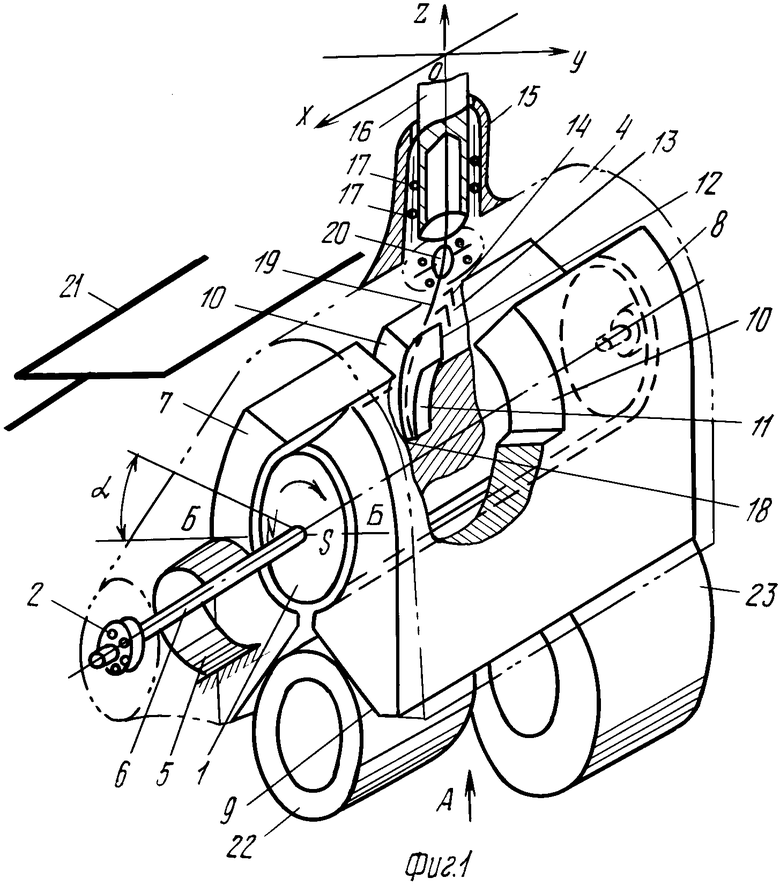
МАГНИТНЫЙ ЗАХВАТ МАНИПУЛЯТОРА, содержащий полюсные наконечники и расположенный между ними поворотный блок, выполненный в виде постоянного магнита, снабженного приводом поворота, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен корпусом, а привод поворота выполнен в виде гибкого элемента и ступенчатого кольцевого сектора из немагнитного материала, на каждой ступеньке которого выполнена канавка, причем кольцевой сектор и один конец гибкого элемента закреплены на боковой поверхности поворотного блока, а другой конец гибкого элемента закреплен на руке манипулятора, при этом гибкий элемент расположен в одной из канавок кольцевого сектора, а поворотный блок подпружинен относительно корпуса.
| Верников А.Я | |||
| Магнитные и электромагнитные приспособления в металлообработке | |||
| М.: Машиностроение, 1984, с.105, табл.20, п.2. |
