Изобретение относится к машиностроению и может быть использовано в различных отраслях народного хозяйства для автоматизации производственных процессов.
Известен промышленный робот, содержащий основание, вертикальный вал с установленной на нем механической рукой, привод ее поворота, выполненный в виде пневмодвигателя и приводы подъема и выдвижения руки.
Основным недостатком этого технического решения является применение пневмодвигателя в приводе поворота механической руки. Его применение ведет к тому, что нужно дополнительно подводить к манипулятору пневмолинию, что ведет к повышению эксплуатационных затрат.
Близким техническим решением, принятым за прототип, является манипулятор, содержащий на основании вал, на котором установлена опора, несущая рука со схватом, устройство перемещения руки, включающее двигатель, соединенные последовательно ременную и червячную передачи, основной кулачковый механизм с роликами, гипоциклоидный механизм, три зубчатые передачи, дополнительный кулачковый механизм.
Однако данное техническое решение имеет сложную конструкцию, кроме того, применение ременной передачи от электродвигателя к валу червячной передачи может привести к проскальзыванию, а значит и снижению точности позиционирования.
Целью изобретения является упрощение конструкции и повышение точности позиционирования.
Это достигается тем, что манипулятор, содержащий основание, электродвигатель, зубчатую передачу, связывающую электродвигатель с поворотной вертикальной колонкой, посаженной на вертикальный вал, установленный на основании, на верхнем окончании вала жестко эксцентрично закреплен плоский горизонтальный элемент, сопричастный с упорными роликами, снабжен механической рукой, выполненной в виде шарнирного параллелограмма с консольно выступающим звеном, шарнирным шатуном, штоком, верхнее трубчатое звено с входящим в него штоком связано с захватом, причем шток связан через шарнирный шатун с консольно выступающим звеном, а нижнее горизонтальное звено шарнирного параллелограмма жестко связано с вертикальной поворотной колонкой, а на верхнем трубчатом звене жестко закреплены упорные ролики.
Сравнение заявляемого технического решения с другими разработками показывает, что аналогичные конструкции известны, однако заявляемое технического решение обладает следующими отличительными признаками.
Манипулятор снабжен механической рукой, выполненной в виде шарнирного параллелограмма, причем нижнее звено его жестко связано с вертикальной поворотной колонкой. Это позволяет без применения дополнительного двигателя при повороте манипулятора производить подъем и опускание захвата. Шток верхнего трубчатого звена шарнирного параллелограмма связан через шарнирный шатун с консольно выступающим звеном. Это обеспечивает при поднятии или опускании манипулятора выдвижение или зависание захвата. На верхнем трубчатом звене жестко закреплены упорные ролики, сопричастные с плоским горизонтальным элементом. Причем плоский горизонтальный элемент выполнен в виде диска с диаметральной прорезью, что позволяет применять эксцентриситет при закреплении, а также производить поворот вокруг вертикального вала. Это позволяет при повороте поворотной вертикальной колонны производить подъем (опускание) и задвигание (выдвижение) захвата.
Совокупность осуществляемых признаков заявляемого технического решения проявляет свойства, дающие положительный эффект, заключающийся в цели изобретения.
Это позволяет сделать вывод о соответствии предлагаемого технического решения критерию "существенные отличия".
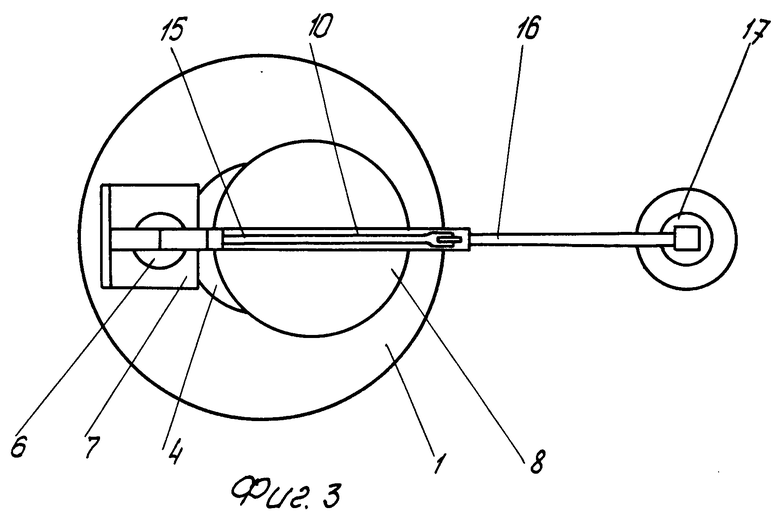
На фиг.1 показан общий вид манипулятора; на фиг.2 - то же, при повороте на 180о; на фиг.3 - манипулятор, вид сверху; на фиг.4 - то же, при повороте механической руки на 180о.
К основанию 1 смонтирован вертикальный вал 2 с надетой на него поворотной колонкой 3. Зубчатая передача состоит из закрепленной на колонке 3 ведомой шестерни 4, сопричастной с ведущей шестерней 5, закрепленной на валу электродвигателя 6, установленного на кронштейне 7. На верхнем окончании вертикального вала 2 жестко эксцентрично закреплен плоский горизонтальный элемент 8, сопричастный с упорными роликами 9, жестко установленными на верхнем трубчатом звене 10 механической руки 11, выполненной в виде параллелограмма 13 с жестким горизонтальным звеном 12. Выступающее консольно звено 14 соединено через шарнирный шатун 15 со штоком 16 и закрепленным на штоке 16 захватом 17.
Работа манипулятора состоит в следующем.
Подается питание на манипулятор с включением электродвигателя 6, связанного с шестерней 4 через шестерню 5, происходит поворот колонны 3 на заданный угол. Одновременно с этим происходит подъем верхнего трубчатого звена 10 за счет сопряжения роликов 9 с эксцентрично жестко закрепленным горизонтальным элементом 8. При этом происходит выдвижение (задвигание) штока 16 с захватом 17, осуществляемое связью консольно выступающего звена 14 через шарнирный шатун 5 со штоком 16.
Преимущество изобретения состоит в том, что манипулятор прост в изготовлении и надежен в эксплуатации вследствие применения в нем одного электродвигателя. Повышение точности позиционирования производится за счет применения негибких передач, что исключает проскальзывание. Данные преимущества снижают эксплуатационные затраты на 15-20%.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 1992 |
|
RU2022772C1 |
| МАНИПУЛЯТОР | 1991 |
|
RU2022784C1 |
| КАНАТНАЯ СКРЕПЕРНАЯ УСТАНОВКА | 1991 |
|
RU2011751C1 |
| Манипулятор | 1987 |
|
SU1537516A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1990 |
|
RU2042503C1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| АДАПТИВНЫЙ ЗАХВАТ РУКИ МАНИПУЛЯТОРА | 1991 |
|
RU2022778C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022779C1 |
| ПРИВОД КАМНЕРЕЗНОЙ МАШИНЫ | 1991 |
|
RU2021121C1 |


Область применения: в машиностроении, в частности для автоматизации производственных процессов. В механической руке, выполненной в виде шарнирного параллелограмма, звено 12 связано с приводом вращения, а шатун 15 связывает второе звено 10 параллелограмма с боковым звеном 13. 4 ил.
МАНИПУЛЯТОР, содержащий основание с вертикальной стойкой, на которой расположена приводная колонка, механическую руку с захватом, привод ее поступательного перемещения, выполненный в виде кулачкового механизма, содержащего параллельный руке кулачок и упорные ролики, отличающийся тем, что механическая рука выполнена в виде параллелограммного механизма, одно звено которого жестко связано с приводной колонкой, параллельное ему звено выполнено телескопическим, а одно боковое звено выполнено консольным и связано посредством дополнительно введенного шатуна с наружным элементом телескопического звена, при этом кулачок жестко связан со стойкой, а упорные ролики - с наружным элементом телескопического звена.
| Манипулятор | 1988 |
|
SU1521577A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
