Изобретение относится к грузозахватным устройствам, в частности к пневматическим захватам и может быть использовано в конструкциях манипуляторов и промышленных роботов.
Известен вакуумный захват, содержащий корпус с отверстием, сообщенным с пневмоканалом. эластичную камеру, жестко связанную с механической рукой захвата и заслонку-пневмоклапан, установленную с возможностью перемещения в отверстии корпуса и закрепленную от выпадания стопорным кольцом, установленным в отверстии корпуса.
Недостатком этого технического решения является невозможность схватывания деталей со сквозными отверстиями, что сужает технологические возможности захватов.
Наиболее близким по технической сущности к предлагаемому является пневматический схват для плоских деталей, содержащий корпус с центральным отверстием для подвода сжатого воздуха к пазам, выполненным на его торцевой поверхности. Внутри корпуса соосно с ним закреплена конусообразная насадка, в полости которой размещена упругая манжета, при этом рабочие кромки манжеты располагаются за пределами плоскости торцевой рабочей поверхности конусообразной насадки.
Недостатком известного технического решения является невысокая надежность, нерациональные энергетические затраты при работе компрессора, а также дискомфортные условия возникающие при эксплуатации из-за шума воздуха проходящего через каналы схвата.
Целью изобретения является повышение надежности и расширение технологических возможностей за счет схватывания деталей со сквозными отверстиями.
Поставленная цель достигается тем, что в вакуумном захвате, содержащем присоску на руке манипулятора и выполненную из эластичного материала, при этом в рабочей полости присоски, соединенной с источником разряжения, установлена заслонка, выполненная в виде диска из магнитного материала, на рабочем торце которого нанесено эластичное покрытие, причем в корпусе присоски смонтирована жесткая пластина, установленная параллельно рабочей поверхности присоски и образующая дополнительную полость, соединенную с рабочей полостью, при этом в центральной части пластины выполнено сквозное отверстие, в котором свободно установлен стержень, на одном конце которого поставлена заслонка, а на другом конце диск, который в свою очередь жестко связан с эластичной стенкой дополнительной полости, кроме того пластина закреплена на руке манипулятора.
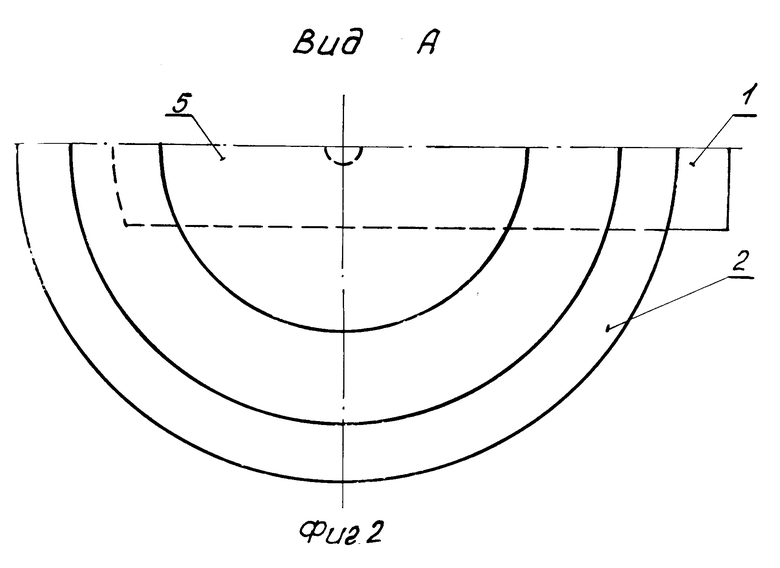
На фиг. 1 изображен вакуумный захват, общий вид, продольный разрез (для описания в БИ); на фиг. 2 вид А на фиг. 1.
Вакуумный захват содержит механическую руку манипулятора 1, вмонтированную в эластичную присоску 2. В механической руке 1 выполнен пневмоканал 3 и отверстие 4 со стороны рабочей полости присоски 2, в которой размещена заслонка 5, представляющая собой диск из магнитного материала. Заслонка 5 подвешена на конце стержня 6, пропущенного через механическую руку 1 вакуумного захвата. На другом конце стержня 6 смонтирована жесткая пластина 7 ограничивающая его ход, которая упруго охвачена присоской 2 и приклеена к ней по поверхности соприкосновения. Заслонка 5 имеет на рабочем торце эластичное покрытие 8. Длина Б стержня 6 больше высоты В пневмоприсоски 2 в состоянии схватывания. Плоская ферромагнитная деталь 9 имеет сквозные отверстия 10 12 и подлежит захвату присоской и переносу на участок обработки (загрузки).
Вакуумный захват работает следующим образом.
В исходном положении присоска 2 недеформирована и прижимает пластину 7 к механической руке 1 манипулятора. Для осуществления рабочего процесса присоска 2 с помощью механической руки 1 манипулятора опускается на деталь 9 и прижимается к ней. При этом присоска 2 деформируется и, воздействуя на пластину 7, которая передает усилие через стержень 6 на заслонку 5, прижимает ее к детали 9, перекрывая сквозные отверстия 10 12. Применение предварительно намагниченной заслонки 5 и эластичного покрытия 8, обращенного в сторону захватываемой детали, позволяет обеспечить лучшую герметичность полости, образующейся между пневмоприсоской 2 и деталью 9. Пневмоканал 3 соединяется с источником вакуума. В поднятом положении транспортируемая деталь 9 удерживается на плоскости присоски 2 силой, создаваемой разностью давлений атмосферного и источника вакуума.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 1991 |
|
RU2022784C1 |
| Адаптивный вакуумный захват | 1991 |
|
SU1816690A1 |
| АДАПТИВНЫЙ ЗАХВАТ РУКИ МАНИПУЛЯТОРА | 1991 |
|
RU2022778C1 |
| МАГНИТНЫЙ ЗАХВАТ МАНИПУЛЯТОРА | 1990 |
|
RU2016757C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022779C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022777C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Схват манипулятора | 1990 |
|
SU1756145A1 |
| Вакуумное захватное устройство | 1990 |
|
SU1776558A1 |
| Пресс для вырубания обувных деталей из листового материала | 1986 |
|
SU1463215A1 |
Использование: в конструкциях манипуляторов и промышленных роботов. Сущность изобретения вакуумный захват содержит механическую руку 1, вмонтированную в эластичную пневмокамеру 2. В механической руке 1 выполнен пневмоканал 3 и отверстие 4 со стороны рабочей полости пневмокамеры 2, в которой размещена заслонка 5, представляющая собой намагниченную металлическую пластину дискообразной формы. Заслонка 5 подвешена на конце штока 6, пропущенного через механическую руку 1 вакуумного захвата. На другом конце штока 6 смонтирован дисковый ограничитель 7 его хода, который упруго охвачен пневмокамерой 2 и приклеен к ней по поверхности соприкосновения. Заслонка 5 имеет эластичное покрытие 8, обращенное вниз. Длина Б штока 6 больше высоты В пневмокамеры 2 в состоянии охватывания. Плоская ферромагнитная деталь 9 имеет сквозные отверстия 10 - 12 и подлежит захвату пневмокамерой и переносу на участок обработки (загрузки). 2 ил.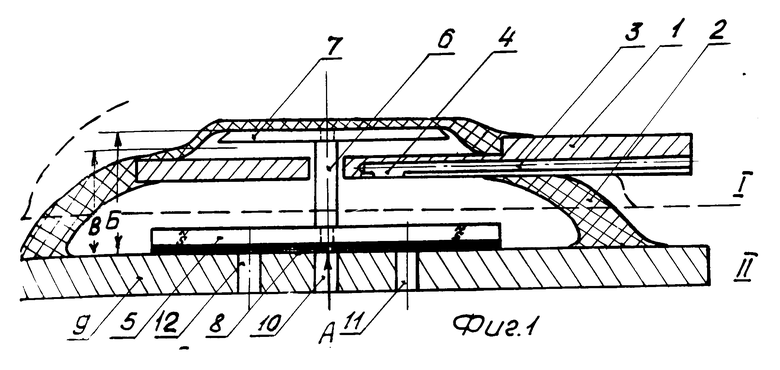
Вакуумный захват, содержащий присоску на руке манипулятора, выполненную из эластичного материала, при этом в рабочей полости присоски, соединенной с источником разряжения, установлена заслонка, отличающийся тем, что, с целью повышения надежности и расширения технологических возможностей, заслонка выполнена в виде диска из магнитного материала, на рабочем торце которого нанесено эластичное покрытие, причем в корпусе присоски смонтирована жесткая пластина, установленная параллельно рабочей поверхности присоски и образующая дополнительную полость, соединенную с рабочей полостью, при этом в центральной части пластины выполнено сквозное отверстие, в котором свободно установлен стержень, на одном конце которого поставлена заслонка, а на другом конце диск, который жестко связан с эластичной стенкой дополнительной полости, кроме того, пластина закреплена на руке манипулятора.
| Пневматический схват для плоских деталей | 1984 |
|
SU1181865A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
