Изобретение относится к робототехнике и предназначено для использования в конструкциях промышленных роботов и манипуляторов.
Известно устройство для подачи заготовок, содержащее двуплечие рычаги шарнирно связанные между собой, зажимные губки, каждая из которых установлена на одном из концов двуплечего рычага.
Недостатком данной конструкции является сложность кинематической связи узлов и невысокая надежность в работе.
Наиболее близким техническим решением к предлагаемому является адаптивное захватное устройство, содержащее корпус, в котором размещен зубчатый механизм с зажимными рычагами, установленными на них зажимными губками.
Недостатком данного технического решения является громоздкое и сложное конструктивное исполнение и соответственно ненадежность в эксплуатации.
Целью изобретения является упрощение конструкции и повышение надежности в работе.
Это достигается тем, что в адаптивный захват манипулятора, содержащий корпус, шарнирно-параллелограммный механизм, зажимные губки, снабжен корпусом в виде Т-образной пластины, верхняя вертикальная часть которой соединена скользящей посадкой с механической рукой, соединенной в свою очередь с горизонтальной скобой, имеющей на концах шарнирные оснащенные роликами обоймы с пропущенными через них рычагами зажимных губок.
Сравнение изобретения с другими разработками показывает, что аналогичные конструкции известны. Однако изобретение обладает следующими отличительными признаками.
Корпус имеет форму в виде перевернутой буквы Т, что обеспечивает компактность и простоту конструкции с возможностью удобства монтажа, осмотра, наладки и ремонта. Механическая рука соединена с вертикальной частью корпуса скользящей посадкой, что обеспечивает возможность попутно автоматически осуществлять захват и освобождение перемещаемого груза. Механическая рука жестко соединена с горизонтальной подвижной скобой, имеет на концах шарнирные, оснащенные роликами, обоймы, что позволяет эффективно воздействовать на сближение и разъединение рычагов, связанных с зажимными губками. На корпусе смонтирован выдвижной подпружиненный фиксатор, обеспечивающий раскрытие зажимных губок перед захватом перемещаемого груза.
Совокупность существенных отличительных признаков изобретения позволяет сделать вывод о соответствии его критерию "существенные отличия".
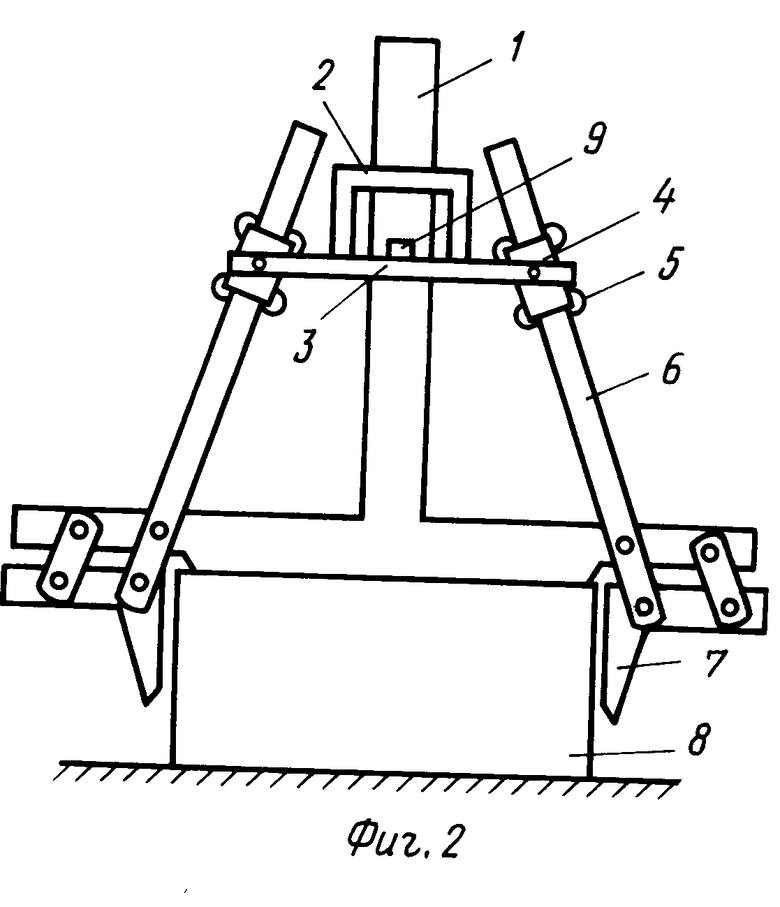
На фиг.1 показано положение при осуществлении захвата груза; на фиг.2 - положение, освобождение захвата от груза.
Адаптивный захват манипулятора состоит из корпуса 1 с присоединенной к нему концевой частью механической руки 2, на которой жестко закреплена скоба 3, имеющая на концах шарнирные обоймы 4, оснащенные роликами 5, сквозь обойму пропущены шарнирные рычаги 6, соединенные с зажимными губками 7, предназначенные для захвата груза 8, на корпусе 1 установлен подпружиненный фиксатор 9. Рычаги 7 являются составной частью шарнирно-параллелограммного механизма.
Работа захвата осуществляется следующим образом.
Посредством концевой части механической руки 2 (фиг.2) захват опускается на перемещаемый груз 8. Затем при включении задающего устройства (не показано) вдвигается в гнездо подпружиненный фиксатор 9. После этого осуществляется подъем механической руки 2 вместе со скобой 3, которая смещается вверх относительно корпуса 1. При этом обоймы 4, перемещаясь вверх по рычагам 6, раздвигают концы рычагов 6 в стороны и одновременно осуществляется сжатие губками 7 груза 8. Усилие сжатия будет тем больше, чем выше продвигается обойма 4 по рычагам 6. Зажатый таким путем груз 8 посредством механической руки перемещается, опускается на разгрузочную площадку и опускается до соприкосновения груза с площадкой. Продолжая после этого опускаться, механическая рука вместе со скобой 3 продолжают опускаться, сближая посредством обойм 4 верхние концы рычагов. В результате зажимные губки 7 расходятся в стороны, освобождая груз. В таком положении подпружиненный фиксатор 9 выдвигается из гнезда, препятствуя этим перемещению скобы 3 вверх относительно корпуса захвата. Далее посредством механической руки 2 адаптивный захват манипулятора, оставив груз на разгрузочной площадке, возвращается за новым грузом, и цикл работы повторяется.
Преимущество изобретения состоит в том, что захват и освобождение перемещаемого груза осуществляются без необходимости применять специальные технологические операции, что усложняет конструкцию захвата и снижает надежность в работе.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022779C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022777C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Захватное устройство | 1990 |
|
SU1796453A1 |
| МАНИПУЛЯТОР | 1991 |
|
RU2022784C1 |
| Адаптивное захватное устройство | 1986 |
|
SU1399114A1 |
| МАГНИТНЫЙ ЗАХВАТ МАНИПУЛЯТОРА | 1990 |
|
RU2016757C1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ЗАГОТОВОК В ПРЕСС | 1993 |
|
RU2063287C1 |
| Адаптивный вакуумный захват | 1991 |
|
SU1816690A1 |
| ВАКУУМНЫЙ ЗАХВАТ | 1990 |
|
RU2091208C1 |
Использование: в робототехнике, в конструкциях промышленных роботов и манипуляторов. Сущность изобретения: адаптивный захват содержит корпус 1 с подвижной скобой 3, несущей на концах обоймы 4 с роликами 5, и фиксатор положения скобы 9. Рычаги 6, являющиеся звеньями шарнирно-параллелограммного механизма, установлены в обоймах 4. При перемещении обоймы 4 вверх концы рычагов 6 раздвигаются и осуществляется зажим груза 8. 2 ил.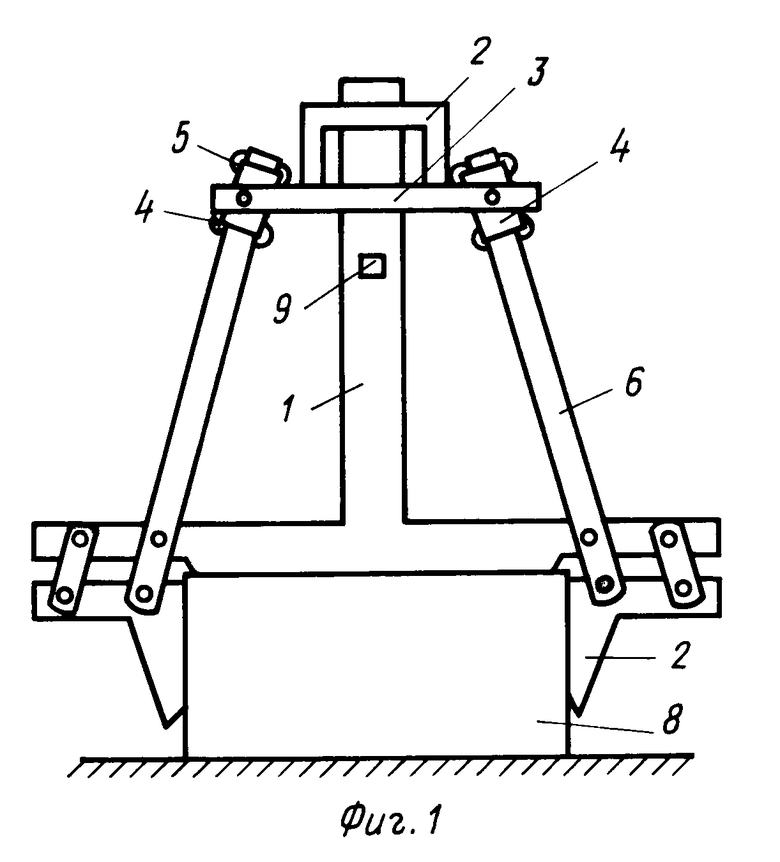
АДАПТИВНЫЙ ЗАХВАТ РУКИ МАНИПУЛЯТОРА, содержащий корпус, смонтированный на корпусе шарнирно-параллелограммный механизм с зажимными губками, отличающийся тем, что, с целью упрощения конструкции и повышения надежности, он снабжен фиксатором с приводом, связанной с ручкой манипулятора скобой с центральным пазом и шарнирно смонтированными на концах скобы обоймами с роликами, при этом корпус захвата выполнен в виде Т-образной пластины, вертикальная стойка которой расположена в пазу скобы, а фиксатор смонтирован по оси вертикальной стойки корпуса и выполнен в виде подпружиненного стержня, имеющего возможность взаимодействия со скобой, кроме того, одни из звеньев шарнирно-параллелограммного механизма выполнены удлиненными и установлены в обоймах с возможностью взаимодействия с роликами.
| Захват манипулятора | 1986 |
|
SU1399115A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
