Изобретение относится к авиации, а именно к управлению аэродинамической поверхностью летательного аппарата, а также может быть использовано на судах с подводными крыльями.
Целью изобретения является расширение возможностей управления путем установки аэродинамической поверхности в любой плоскости в пpостранстве.
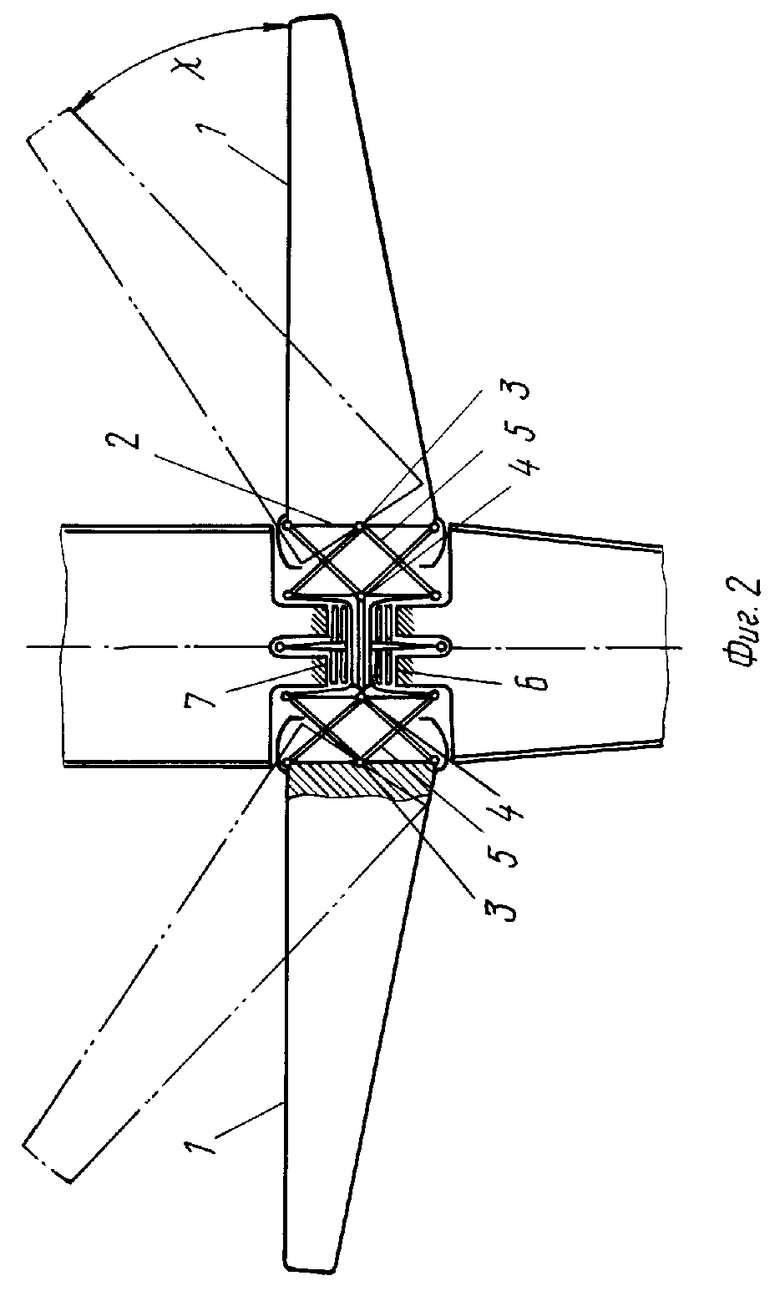
На фиг. 1 изображено устройство, поперечный разрез относительно фюзеляжа; на фиг.2 - то же, вид сверху; на фиг.3 - то же, вид сбоку; на фиг.4 - сечение А-А на фиг.1; на фиг.5 - сечение Б-Б на фиг.1; на фиг.6 - вид конструкции устройства в увеличенном масштабе.
Устройство для управления аэродинамической поверхностью, например крылом 1, включает опорные диски 2, на периметре которых имеются четыре опорные точки 3. Кинематическое соединение опорных точек 3 с радиальными рычагами 4 осуществляется перекрестными двойными тягами 5. Опорные точки 3 и концы рычагов 4 снабжены шарнирами, расположенными напротив один другого. Соединение их перекрестными двойными тягами 5 произведено так, что каждый шарнир опорного диска 2 соединен не с противоположным ему шарниром на радиальном рычаге 4, а с рядом лежащими шарнирами радиальных рычагов 4. При четырех опорных точках необходимое число тяг 5 к ним равно восьми (четыре двойных). Радиальные рычаги 4 жестко укреплены и распределены радиально на управляющих валах 6, расположенных коаксиально относительно один другого. Последние установлены шарнирно в опорном основании 7 и соединены через рычаги 8 и шарниры 9 с приводами 10. Радиальные рычаги 4 и 8 установлены в трех плоскостях вокруг управляющих валов 6. Вместо соосно установленных валов могут быть применены валы, расположенные параллельно один другому. Крепление радиальных рычагов 4 на управляющих валах 6 выполнено на обоих торцах по каждому валу. Таким образом, что радиальные рычаги соответственно параллельны на обоих управляющих валах. К опорным дискам 2 жестко прикреплены левая и правая плоскости крыла 1, при этом продольная ось крыла и управляющих валов совпадают или параллельны.
Минимальное количество опорных точек 3 на диске 2 может быть равно трем.
Устройство работает следующим образом.
В случае управления по изменению поперечного угла V, когда движение крыла происходит в вертикальной плоскости (вверх и вниз), достаточно управления только по двум управляющим валам, связанным с горизонтально расположенными радиальными рычагами 4. Противофазное вращение указанных управляющих валов при действии на них усилий соответствующих приводов приводит к перемещению по дуге навстречу один другому шарниров радиальных рычагов. При этом тяги 5, действуя на опорные точки 3 правого опорного диска 2, смещают их верхнюю по дуге против часовой стрелки вниз, а нижнюю - по дуге вверх, что приводит к повороту пpавого опорного диска против часовой стрелки с соответствующим движением правой плоскости крыла. Тяги 5, действуя на опорные точки 3 левого опорного диска, смещают их - верхнюю по дуге по часовой стрелке вниз, нижнюю - по часовой стрелке по дуге вверх, что приводит к повороту левого опорного диска по часовой стрелке с соответствующим движением левой плоскости крыла.
Таким образом, левая и правая плоскости крыла движутся противофазно (обе вверх) вместе с опорными дисками относительно их центров, образуя угол V поперечного крыла.
В случае управления стреловидностью крыла по углу Х, когда движение крыла происходит в горизонтальной плоскости (назад и вперед), также достаточно осуществить движение только по двум управляющим валам, связанным теперь с вертикально расположенными рычагами 4. При повороте этих двух управляющих валов так, чтобы указанные радиальные рычаги 4 двигалиcь навстречу друг другу, происходит действие тяг 5 на горизонтально расположенные опорные точки 3 правого опорного диска 2 и смещение их по дуге в горизонтальной плоскости, такое же действие оказывается и на левый опорный диск. Это действие приводит к пpотивофазному повороту правой и левой плоскостей крыла в горизонтальной плоскости. Управления крылом по углам V и Х приводит к тому, что в управлении возможны не только крайние варианты, когда изменяется в отдельности положение плоскости по одному из углов, но и промежуточные движения в виде одновременного изменения сразу двух (трех) величин, что расширяет возможности управления полетом.
Реализация отмеченных возможностей осуществляется при соответствующем совместном действии приводов управления по всем управляющим валам.
В рассматриваемом варианте конструкции число приводов 10 равно четырем. Однако минимальное количество их может составлять только три, соответственно три ортогональные оси движения крыльев. Механизм также может быть выполнен несимметричным. При этом выдерживается равенство  = const= сonst, где R - радиус радиального рычага; а - расстояние между плоскостями диска 2 и рычагов 4.
= const= сonst, где R - радиус радиального рычага; а - расстояние между плоскостями диска 2 и рычагов 4.
Управление по углу α атаки, когда производится изменение по третьей координате, осуществляется поворотом сразу всех управляющих валов 6. При этом вся кинематически связанная система поворачивается как одно целое вокруг продольной оси управляющих валов вместе с поворотом опорных дисков 2 и плоскостями крыльев 1, т.е. в этом случае происходит фазный поворот плоскостей крыльев по углу α. Поворот плоскостей крыльев может производиться также в любой из трех ортогональных плоскостей в пространстве, т.е. по углам стреловидности X, поперечному V и α атаки, причем совместная доля одного угла в другом может быть любая, поворот по углу атаки может быть вместе с поворотом по поперечному углу и углу стреловидности в любом соотношении, а их фаза и противофаза таковы, что плоскости крыльев могут двигаться в противофазе по углу стреловидности и поперечному углу, а по углу атаки - в фазе.
Изобретение, кроме расширения возможностей управления летательным аппаратом, позволяет реализовать необходимые характеристики самолета короткого взлета и посадки, а также уменьшить габариты самолета при его транспортировании и хранении. Наиболее рационально применять устройство для управления плоскостями переднего горизонтального оперения.




Изобретение относится к авиации и может быть использовано для управления аэродинамическими поверхностями летательных аппаратов по соответствующим углам. Цель изобретения - расширение возможностей управления путем установки аэродинамической поверхности в любой плоскости в пространстве. Механизм управления выполнен в виде опорных дисков 2, шарнирно соединенных в неменее трех опорных точках 3 с помощью перекрестных двойных тяг 5 с равным числу опорных точек 3 радиальными рычагами 4. Последние установлены параллельно один другому в параллельных плоскостях, попарно на соответствующих управляющих валах 6, шарнирно укрепленных в основании. Каждый вал соединен с отдельным приводом. 6 ил.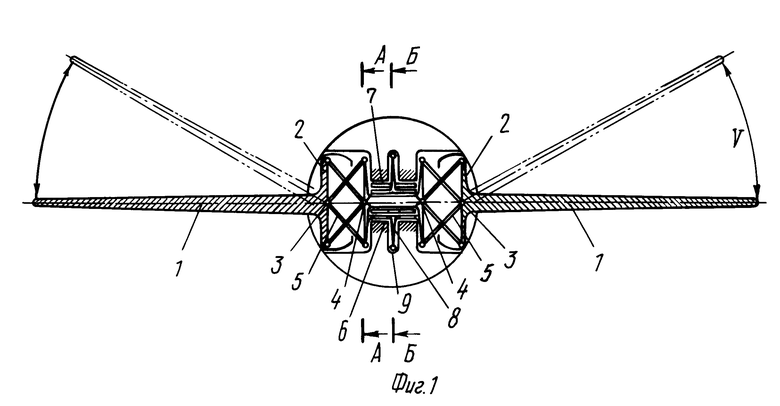
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТЬЮ ЛЕТАТЕЛЬНОГО АППАРАТА, содержащее механизм регулирования аэродинамической поверхности по углам стреловидности, атаки и поперечного угла V, отличающееся тем, что, с целью расширения возможностей управления путем установки аэродинамической поверхности в любой плоскости в пространстве, механизм выполнен в виде опорных дисков, шарнирно соединенных в не менее чем трех опорных точках с помощью перекрестных двойных тяг с равным числу опорных точек радиальными рычагами, установленными параллельно друг другу в параллельных плоскостях, попарно на соответствующих коаксиально или параллельно расположенных управляющих валах, шарнирно установленных в основании, при этом радиальные рычаги расположены между опорными дисками, а каждый вал соединен с приводом.
| Патент США N 3330501, кл | |||
| Нагревательный прибор для центрального отопления | 1920 |
|
SU244A1 |
